о
Изобретение относится к гидромеханизации, а именно к устройствам для автома- тизации землесосных снарядов, используемых в транспортном строительстве и других отраслях народного хозяйства,
Известно устройство для контроля технологических параметров процесса грунто- забора земснаряда, которое позволяет определять консистенцию пульпы, текущую производительность и выработку земснаряда за известный промежуток времени.
Однако оно не позволяет управлять технологическим процессом разработки грунта, так как в нем отсутствуют связи с исполнительными механизмами земснаряда.
Известно устройство для управления землесосным снарядом, содержащее датчики расхода, мощности грунтового насоса, плотности, напора и разрежения, а также блоки определения допустимой величины вакуума и ожидаемого расхода, блок сравнения, блок контроля и исполнительный механизм, который регулирует скорость папильонирования. В этом устройстве параметр регулирования технологического режима V(t) рассчитывается по формуле (1) на основании показаний датчиков расхода Q(t), мощности насоса N(t), плотности гидросмеси у (т.) и напора в напорном трубопроводе M(t), которое затем сравнивается с измерен- нным разрежением /изм(т.). Расчетная формула имеет вид:
.VM NЈl:
vw тщу
7ш
-2g
QM2 fQJl±r)x2
Он ISb
(1).
где rj - КПД гидросистемы насос - трубопровод;
SH и Зь - площади поперечного сечения напорного и всасывающего трубопроводов;
g - ускорение свободного падения.
К недостаткам данного устройства можно отнести следующее. Разность рассчитан- .ного и измеренного разрежений в любой момент времени t зависит не от степени разрегулирования технологического режима, а от точности измерения параметров VM3M(t), N(t), Q(t), }-(t). M(t) и точности, с которой выражение (1) описывает реальный процесс, т.е. в любой момент времени /изм(т.) (t). Формула (1) получена из условия равенства напора, развиваемого насосом, т.е.
N(tj- Нн {t) - -TTTFrrvTfT
тУШ-гШ
(2)
и напора, развиваемого пульпой в трубопроводе (nofepn в трубопроводе), т.е.
Нт (t) M-(t) + V(t) + Vl (.) .
(3)
Это условие позволяет получить две рабочие точки А и В, лежащие на пересечении напорных характеристик насоса Нн и трубопровода Нт(фиг.1). Точка А характеризует режим работы с заилением, т.е. неустойчивый, а точка В соответствует .устойчивому режиму работы, При этом условии область устойчивой работы земснаряда, характери зующаяся изменением расхода от Qc до QR, не попадает в пределы регулирования (Qc - критический расход) устройства. В устройстве не предусмотрен контроль ситуации, когда напорные характеристики насоса и трубопровода не имеют точек пересечения, т.е. когда напор, развиваемый грунтовым насосом, оказывается недостаточным для преодоления сопротивления в напорном трубопроводе (на фигч1 характеристика Нт для плотности гидросмеси уг). При этом грунт в напорном трубопроводе начинает быстро выпадать в осадок, что может привести к забивке трубопровода. Таким образом, закон регулирования (1). положенный в ос- нову действия устройства, не полностью отражает динамику реальных условий работы земснаряда, что может привести к несвоевременной или неадекватной реакции устройства. Рабочий режим земснаряда определяется гидравлической HH(Q) и кави- тационной Нк(0) характеристиками грунтового насоса, характеристиками полного трубопровода HT(Q) и всасывающего Не(0) трубопровода. При этом устойчивый режим
работы земснаряда, обеспечивающий оптимальную производительность, будет находиться в области Qc Q(t)QB для плотности гидросмеси у.1 (фиг.1). При (т) Qc скорость гидросмеси становится меньше критической и происходит частичное выпадение транспортируемого грунта в осадок, в результате чего происходит заиление и увеличение потерь напора в пульпопроводе, что, в свою очередь, может привести к полной забивке пульпопоовода. При увеличении потерь HT(Q) напор грунтового насоса становится недостаточным для транспортирования пульпы ( в результате увеличения плотности гидросмеси, длины пульпопрово5
0
5
да, высоты намываемого сооружения или др.), что приводит также к выпадению грунта в осадок. Точка D пересечения характеристик HB(Q) и Нк(0) позволяет определить расход Од, при котором начинается кавитация грунтового насоса. Таким образом, земснаряд работает в устойчивом и безопасном режиме при (t) Qmax, где Qmax Qe, если QB Од или Qmax Од. если Од QB, a задача регулирования режима земснаряда сводится к определению допустимой области изменения расхода и консистенции гидросмеси и при заданных внешних условиях, т.е. типе грунта, характеристиках земснаряда, глубины забоя, высоты намываемой отметки и др.
Нафиг.2 представлены характеристики земснаряда для разных значений расходов и плотности гидросмеси и показана область устойчивой работы ABCD для случая, когда максимальный расход Qmax ограничен допустимым напором грунтового насоса (фиг.2а) и для случая, когда максимальный расход ограничен кавитацией насоса. Допустимая область регулирования режима определяется Значениями ( t ) Qmax При
ymin у (t) ушах. Согласно методике характеристики земснаряда рассчитываются по формулам:
:1.2
HH(Q) Hn(Q)(1+);
Hk.(Q) Но (0)-10(-1); (5) Нт (О) НЬ (О) +2 I 1П + I (1п.ж + к + м) +
+ 1,511Р+ + + (1+|M)3;
HB(Q) I.U+hB + Cp||Zi -..
rtо
j t V° , /ч i t VT -,. V
+ &X2g+(1 +§Ml),.
С)
где Hn(Q) - паспортная характеристика грунтового насоса, мм води, ст.;
H0(Q) - кавитационная характеристика насоса для воды, мм води, ст.;
S - объемная консистенция гидросмеси;
Vtp средний коэффициент транспортабельности грунта;
уиу0- плотность гидросмеси и воды, т/м3;
In и 1Пж - длина плавучего подвижного, и жесткого пульпопроводов, м;.
IK, 1м и Ip - длина карьерного, магистрального и разводящего пульпопроводов, м;
I - гидравлический уклон; Z - статический напор, отсчитываемый от оси насоса, м;
Јм и ЈМ1 коэффициенты местных сопро- 5 тивлений в напорном и во всасывающем трубопроводах соответственно;
V, V0 и VT - скорость течения воды в напорном трубопроводе, в устье всасывающего наконечника и во всасывающей трубе 10 соответственно, м/с;
Vp - размывающая скорость, м/с; LB - длина всасывающего трубопровода, м;
- заглубление всасывающего трубоп- 15 ровода под воду, м;
Zi - превышение оси насоса над поверхностью воды в забое, м;
Ср - коэффициент, показывающий какая часть скоростного напора затрачивается 20 на размыв грунта;
Јвх коэффициент входных сопротивлений.
Приведены также алгоритмы и программа расчета точек Qmin и Qmax, Утш и утах. 25Цель изобретения - повышение производительности земснаряда за счет повышения точности регулирования рабочего режима.
Поставленная цель достигается тем, что 30 регулирование режима работы земснаряда ведется по расходуй плотности гидросмеси, полученным путем расчета рабочей области на гидравлической и кавитационной характеристиках грунтовою насоса, а также ха- 35 рактеристиках всасывающего и напорного трубопроводов, с учетом реально изменяющихся внешних условий путем введения в устройство для управления земснарядом, содержащее датчики расхода и плотности 40 гидросмеси, исполнительный механизм, блок определения допустимых параметров (вычислений) и блок сравнения, вход которого соединен с выходом блока вычислений, дополнительно второго блока сравнения, 45 второго исполнительного механизма, тактового генератора, индикаторного табло, семи элементов И и блока ввода данных, выход которого соединен с входом блока вычислений, выход которого соединен также с пер- 50 вым входом ;второго блока сравнения, второй вход которого соединен с вторым входом первого блока сравнения и с первым выходом тактового генератора, второй выход которого соединен с входами датчиков 55 расхода и плотности гидросмеси, выходы которых соединены с третьими входами первого и второго блоков сравнения соответственно, первые выходы которых соединены с первыми входами первого и второго
элементов И соответственно, вторые входы которых соединены с вторыми выходами и первого и второго блоков сравнения соответственно, третьи выходы которых соединены с первыми входами третьего и четвертого элементов И соответственно, вторые входы которых соединены с первым и вторым входами пятого элемента И соответственно, с выходами второго и первого элементов И соответственно, а также с первыми входами шестого и седьмого элементов И соответственно, вторые входы которых соединены с четвертыми выходами первого и второго блоков сравнения соответственно, а выходы соединены с первым и вторым входами индикаторного табло соответственно, а также с первыми входами первого и второго исполнительных механизмов соответственно, вторые входы которых соединены с выходами третьего и четвертого элементов И соответственно, а также с третьим и четвертым входами индикаторного табло соответственно, пятый вход которого соединен с выходами пятого элемента И, а выход соединен с входом тактового генератора.
Каждый блок сравнения содержит первый, второй и третий буферные регистры, а также первый и второй компараторы, первые входы которых соединены вместе и соединены с выходом первого буферного регистра, первый и второй входы которого являются третьим и вторым входами блока сравнения соответственно, первый вход блока сравнения соединен с входами второго и третьего буферных регистров соответственно, выходы которых соединены вторыми входами первого и второго компараторов соответственно, первый и второй выходы которых являются первым, третьим, вторым и четвертым выходами блока сравнения.
Тактовый генератор содержит элемент ИЛ И, триггер, элемент И, задающий генератор, делитель частоты и переключатель, который соединен первым и вторым выходами с первыми входами элемента ИЛИ и триггера соответственно, выход триггера соединен с первым входом элемента И, второй вход которого соединен с выходом задающего генератора, а выход является вторым выходом тактового генератора и соединен с входом делителя частоты, выход которого является первым выходом тактового генератора, вход которого соединен с вторым входом элемента ИЛИ, выход которого соединен с вторым входом триггера.
Индикаторное табло содержит шесть индикаторов, пять элементов И, элемент НЕ,.элемент ИЛИ и дешифратор, входы которого являются первым, вторым, третьим,
четвертым и пятым входами табло и соединены с первыми входами первого, второго, третьего, четвертого и пятого элементов И соответственно, выходы которых соединены с входами первого, второго, третьего, четвертого и пятого индикаторов соответственно, а вторые:входы соединены с выходом элемента ИЛИ, группа из пяти входов которого является группой из пяти выходов де0 шифратора, и с входом элемента НЕ, выход которого соединен с входом шестого индикатора и является выходом индикаторного табло.
Нафиг.З представлена функциональная
5 схема устройства.
Устройство содержит блок 1 ввод-а данных, блок 2 вычислений,датчики 3 и 4 плотности и расхода гидросмеси, тактовый генератор 5, блоки 6 и 7 сравнения, элемен0 ты И.8-Т4, исполнительные механизмы 15 и
16 и индикаторное табло 17.
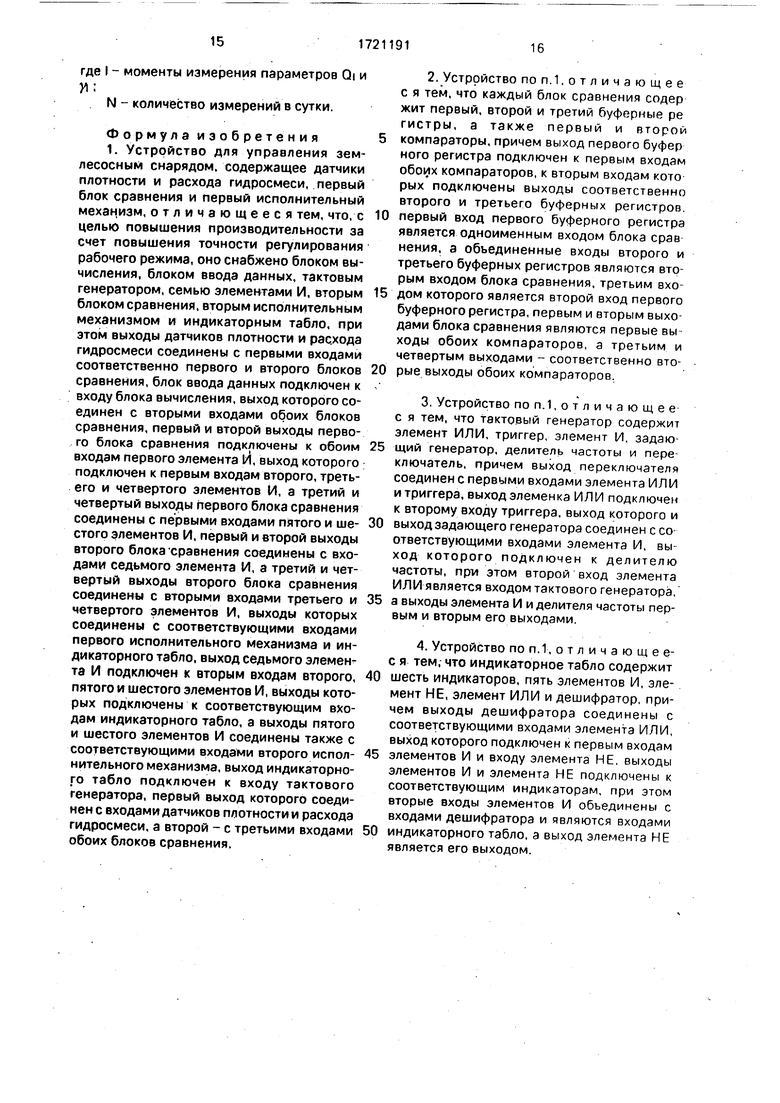
На фиг.4 представлена функциональная схема блока сравнения 6 (схема блока 7 сравнения аналогична).
5 Блок 6 содержит буферные регистры 18i, 19i и 20i, а также компараторы 211 n22i. Блок 7 содержит буферные регистры 182,192 и 20а и компараторы 212 и 222.
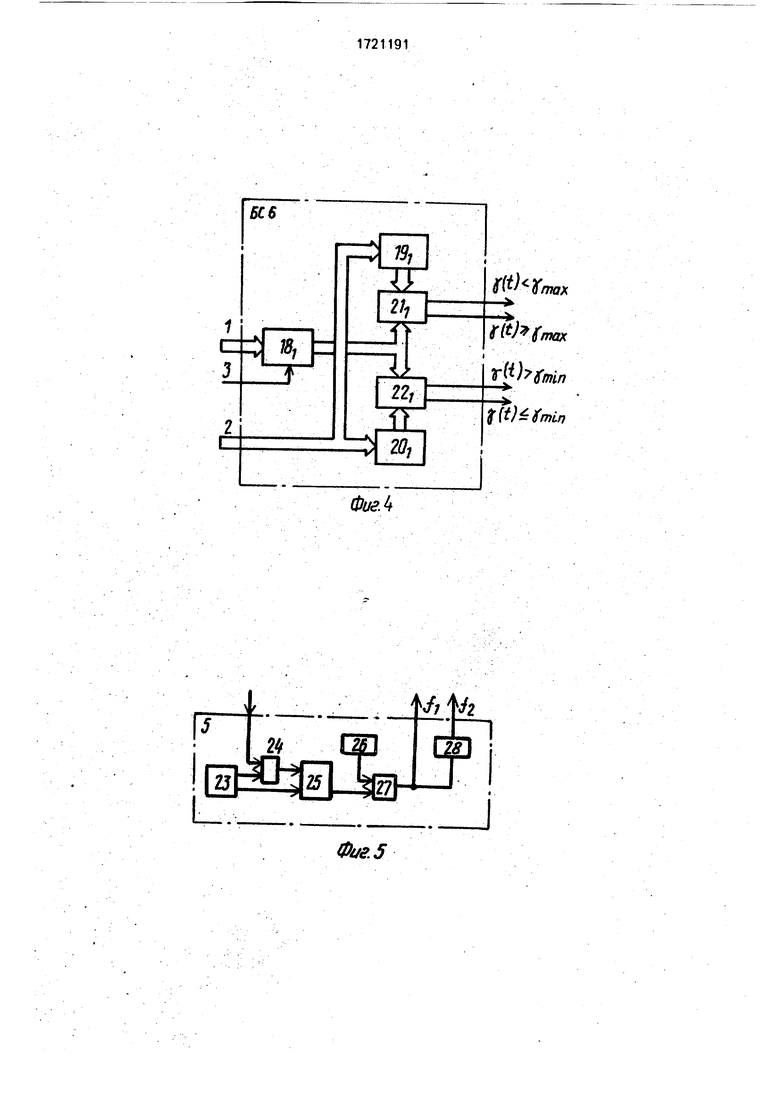
На фиг.5 представлена функциональная
0 схема тактового генератора 5.
Генератор содержит переключатель 23, элемент ИЛИ 24, триггер 25, задающий генератор 26, элемент И 27 и делитель 28 частоты, выполненный по схеме счетчика
5 импульсов.
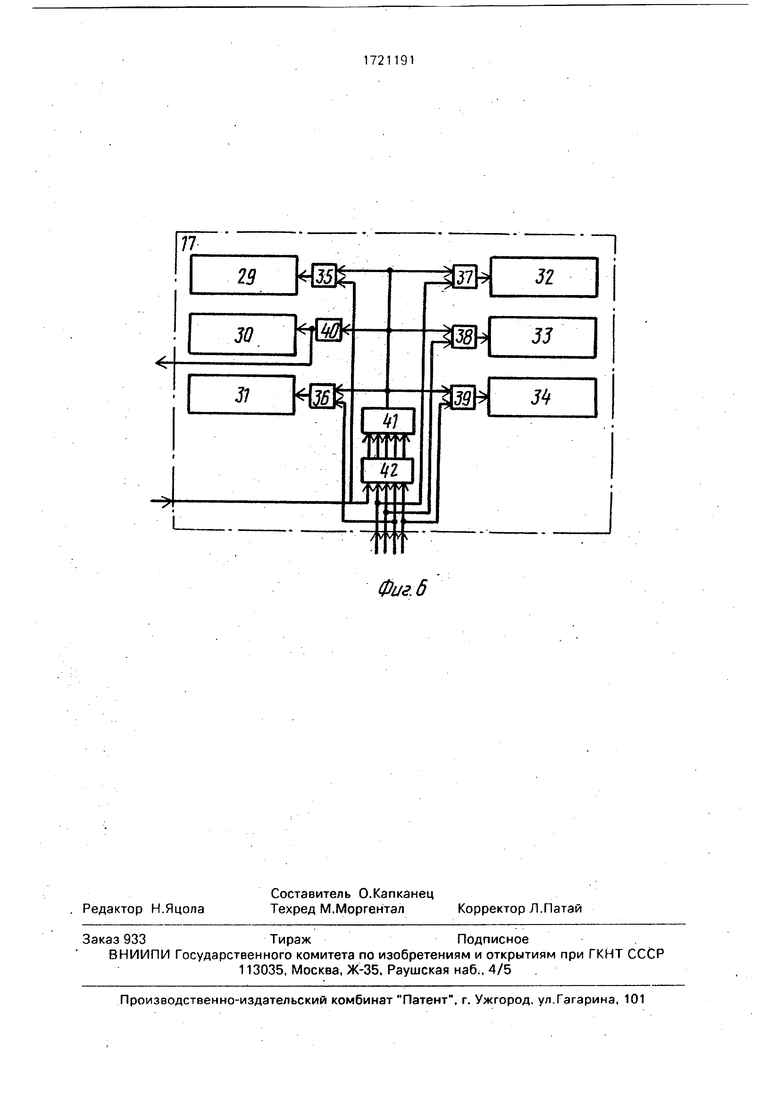
Нафиг.6 представлена функциональная схема индикаторного табло.
Табло содержит индикаторы 29-34, обозначающие Нормальный режим, Пе0 реход на ручное управление, Уменьшить обороты двигателя, Уменьшить папильо- наж, Увеличить папильонаж и Увеличить оборот двигателя соответственно, элементы И 35-39, элемент НЕ 40. элемент ИЛИ.41
5 и дешифратор 42.
Выход fi тактового генератора 5 соединен с входами синхронизации датчиков плотности 3 и расхода 4 гидросмеси. Выходы датчиков 3 и 4 соединены шинами дан0 ных с информационными входами буферных регистров 18i и 182 соответственно блоков 6 и 7 сравнения. Управляющие входы (вход Запись) этих регистров соединены с выходом f2 тактового генератора.
5 Входы буферных регистров 19i и 20i блока 6 сравнения и буферных регистров 192 и 202 блока 7 сравнения соединены с выходом блока 2 вычислений шинами, которые содержат информационные и управляющие линии, Бло.к 1 ввода данных соединен шиной с блоком 2 вычислений. Выходы буферных регистров 19i и 2СИ блока б сравнения соединены шинами данных с первыми входами компараторов 211 и 22i соответственно, Вторые входы этих компараторов соединены шинами данных с выходом буферного регистра 18i. Выходы буферных регистров 192 и 202 блока 7 сравнения аналогично соединены шинами данных с первыми входами компараторов 212 и 222 соответственно, вторые выходы которых соединены шинами данных с входом буферного регистра 182. Первые выходы компараторов 211 и 22ч блока 6 сравнения соединены с выходами элемента И 8, выход которого соединен с входом элементов И 9, 13 и 14. Первые выходы компараторов 212 и 222 блока 7 сравнения соединены с входами элемента И 10, выход которого соединен с входами элементов И 9, 11 и 12. Вторые выходы компараторов 211 и 22i блока 6 сравнения соединены с входами элементов 1/111 и 12, выходы которых соединены с входами исполнительного механизма 15 и индикаторного табло 17. Вторые выходы компараторов 212 и 222 блока 7 сравнения соединены с входами элементов И 13 и И 14, выходы которых соединены с входами исполнительного механизма 16 и входами индикаторного табло 17. Выход элемента И 9 соединен с входом индикаторного табло 17, а выход этого табло соединен с входом тактового генератора 5.
Первый и второй выходы переключателя 23 тактового генератора 5 соединены с первыми входами элементами ИЛИ 24 и триггера 25 соответственно. Переключатель 23 в положении Пуск устанавливает триггер 25 в единичное состояние, а в положении Стоп устанавливает его через элемент ИЛИ 24 в нулевое состояние. Единичный выход триггера 25 соединен с входом элемента И 27, второй вход которого соединен с выходом задающего генератора 26. Выход элемента И 27 является выходом f i тактового генератора и соединен с входом делителя 28 частоты, выход которого является выходом f2 тактового генератора, где f i - частота синхронизации аналого-цифровых преобразователей (АЦП), входящих в состав датчиков 3 и 4, a f2 - частота считывания показаний указанных датчиков. Для нормальной работы устройства необходимо условие fi f2, причем fi определяется быстродействием АЦП, a f2 задает точность работы устройства, т.е. точность регулирования в процессе изменения условий работы земснаряда.
Входы дешифратора 42 являются входами индикаторного табло 17. При этом входы,
соединенные с выходами злемг-шоп И 0 и И 11-14 соответственно, соединены с первыми входами элементов И 35, 37, 38. 3В и 30 соответственно. Выходы этих элемонгов со- 5 единены с входами индикаторов 29. 32. 33. 31 и 34 соответственно, а вторые входы этих элементов соединены с выходом элементл ИЛИ 41 и входом элемента НЕ 40. выход которого соединен с входом индикатора 30
0 и является выходом индикаторного табло. Группа из пяти входов элемента ИЛИ 41 является группой выходов дешифратора 42, который представляет собой десятичный дешифратор с пятью входами, у которого
5 используются не все имеющиеся выходы, а только те, которые имеют десятичные значения 1,2,4,8 и 16. Двоичные аналоги этих десятичных чисел, поступающие на входы дешифратора, имеют в своих кодах только
0 по одной единице, т.е. 00001, 00010. 00100. 01000 и 10000. Эти коды соответствуют сигналам, поступающим от элементов И 14, 13, 12, 11 и 9. Они обеспечивают на соответствующем выходе дешифратора 42 и на выхо5 де элемента ИЛИ 41 единичный сигнал. Остальные 27 кодовых комбинаций имеют в своем составе две и более единицы или ни одной. Такие комбинации дают на всех пяти выходах дешифратора 42 нулевые сигналы,
0 что обеспечивает нулевой сигнал на выходе элемента ИЛИ 41.
Функциональные схемы датчиков 3 плотности и 4 расхода гидросмеси, а также блока 2 вычислений и блока 1 ввода данных
5 не приводятся, так как они не отличаются от известных.
Датчики 3 и 4 содержат первичные измерительные преобразователи (ПИП), которые преобразуют измеряемую плотность
0 гидросмеси и расход в напряжение и АЦП, которые подключены к выходам ПИП и образуют аналоговые сигналы в цифровые. С выходов АЦП цифровые сигналы поступают в буферные регистры 18i и 182 в двоичных
5 параллельных кодах.
Блок 1 вычислений с блоком ввода данных 2 реализованы на микро-ЭВМ СМ 1800 с видеотерминалом СМ 7209 или др. Интерфейс ИРПР обеспечивает передачу инфор0 мации в параллельном коде в выбранный буферный регистр по стандартной шине, содержащей линии данных и линии сигналов Запись.
Регистры 19i, 20i, 19 и 202 реализова5 ны на базе модуля связи СМ 1800.7001 (по отношению к процессору микро-ЭВМ модуль представ лен как массив восьмиразрядных адресуемых регистров). Буферные регистры 18i и 182 выполнены на интеграль- .ных микросхемах К533ИР26. Они принимают информацию в параллельном коде от АЦП, которые могут быть выполнены на микросхемах К1108ПВ1, К1107ПВ1 или др., синхронизированных тактовыми импульсами с выхода таймера.
Таймер и элементы И выполнены на микросхемах К155ТМ2, К155ИЕ2, К155ЛАЗ и др. Компараторы 211,22i, 212 и 222 построены на четырехразрядных микросхемах К555СП1 или 564ИП2. Для увеличения разрядности они соединяются по известным схемам.
Исполнительные механизмы 15 и 16 представляют собой асинхронные электродвигатели, частота вращения которых может регулироваться дискретно путем дискретного изменения сопротивлений в цепи ротора. Схема регулирования двигателя построена на реверсивном счетчике, входы прямого и обратного счета которого являются входами регулирования, а выходы через дешифратор подключены к управляющим входам тиристорных или других ключей, изменяющих длину цепочки резисторов. При этом переход на ручное управление исполнительными механизмами обеспечивается двухвходовыми элементами ИЛИ, выходы которых подключены к входам счетчика, первые входы подключены к выходам элементов И 11 и 12 (или 13 и 14), а вторые входы - к тумблерам ручного управления.
Переключатель 23 может быть выполнен по схеме, содержащей трехполюсную кнопку с двумя фиксированными положениями Пуск и Стоп, источники логического нуля и логической единицы и два резистора, первые выводы которых подключены к источнику логического нуля, а вторые входы соединены с первым и вторым полюсами переключателя(которые являются первым и вторым выходами переключателя. Третий полюс переключателя соединен с источником логической единицы. В положении Пуск триггер 25 устанавливается в единичное состояние, а в положении Стоп триг- .гер переключается в нулевое состояние.
Программа расчета параметров утах, ymin, Qmax и Qmin написана на Фортране и реализована в операционной среде ДОС 1800.
Устройство работает следующим образом.
Перед началом технологического процесса входные данные записываются багермейстером в блок 2 вычислений с помощью блока 1 ввода данных и затем запускается программа расчета. Входными данными для расчета являются характеристики грунта, размеры всасывающего и напорного тр
бопроводов, глубина разработку высота намываемой отметки, технические характеристики грунтового насоса. Блок 2 рассчитывает рабочие параметры угтп, ymax,
Qmin и Qmax, которые программным путем пересылаются в буферные регистры 19i, 20i, 192 и 202, причем числа углах и ymin записываются в регистры 19i и 20i блока б сравнения, а числа Qmax и Qmin записываются в
регистры 192 и 202 блока 7 сравнения соответственно (информация в этих регистрах не изменяется до получения нового варианта расчета).
Затем опускается рама грунтозаборного устройства земснаряда, система заполняется водой, включается грунтовый насос и командой Пуск, включается тактовый генератор 5. Триггер 25 открывает элемент И 27 и тактовые импульсы с частотой следования
fi поступают с выхода задающего генератора 26 на вход синхронизации датчиков 3 и 4 и на вход делителя 28 частоты. С выхода делителя частоты импульсы с частотой f2 поступают на входы Запись буферных регистров 18i и 182 блоков 6 и 7 сравнения. Эти импульсы обеспечивают запись показаний датчиков 3 и 4 в указанные регистры. При этом в регистр 18i записывается текущее значение плотности гидросмеси у(t). a
в регистр 182 текущее значение расхода гидросмеси Q(t). Компараторы 211 и 221 блока 6 сравнения выполняют операцию сравнения числа у (т.) с числами утах и утщ соответственно, а компараторы 212 и 222 блока 7
сравнения выполняют операцию сравнения числа Q(t) с числами Qmax и Qmin соответственно. При этом возможны следующие ситуации.
Если измеренные параметры находятся
в пределах расчетных/г.е. Утах и Qmin Q(t) (площадь ABCD на фиг.2), то земснаряд продолжает работать без регулирования. Сигналы с первых выходов компараторов 21 г, 22г, 21iit 222 поступают через
элементы И 8,10 и 9 на вход табло 17 и через открытый элемент И 35 включает индикатор Нормальный режим. Элемент И 35 открыт единичным сигналом, поступающим с выхода элемента ИЛИ 41.
Если измеренные параметры выходят за пределы расчетных, т.е. y(t)ymax,
y(t) ymin, Q (t) 5: Qnax ИЛИ Q (t) Qnln ,
то на втором выходе соответствующего компаратора 21i, 22i, 212 или 222 появляются управляющие сигналы, а при .разных сочетаниях перечисленных условий компараторами вырабатываются определенные комбинации управляющих сигналов, регулирующих работу земснаряда.
Так, например, одновременное выполнение условий у (t) Углах И Umln Q (t) Отах(линия ВС на фиг,2) соответствует максимально допустимой плотности гидросмеси, поэтому для предотвращения забоя трубопровода необходимо уменьшить скорость папильонирования. При этом условии на втором выходе компаратора 211 и на выходе элемента И 10 появляются еди ничные сигналы, которые поступают на вхо- ды элемента И 11. Сигнал с выхода этого элемента воздействует на первый вход исполнительного механизма 15, который уменьшает скорость папильонирования на дискретную величину AV.
Одновременное выполнение условий
y(t) УтШ И Qmln Q (t) Qmax (ЛИНИЯ AD НЭ
фиг.2) соответствует минимально допустимой плотности гидросмеси, поэтому для увеличения производительности земснаряда необходимо увеличить скорость папильонирования. При этом условии на втором выходе компаратора 22 т и на выходе элемента И 10 появляются единичные сигналы, которые поступают на входы элемента И 12. Сигнал с выхода этого элемента воздействует на второй вход исполнительного механизма 15, который увеличивает скорость папильонирования на величину А V.
Одновременное выполнение условии
Q(t)Qmax И ymin У (t) Утах ;(ЛИНИЯ СО НЭ
фиг.2) соответствует режиму, предшествующему началу кавитации насоса, поэтому для снижения напорной характеристики насоса необходимо уменьшить скорость вращения рабочего колеса. При этом условии на втором выходе компаратора 212 блока 7 сравнения и на выходе элемента И 8 появляются единичные сигналы, которые поступают на входы элемента И 13. Сигнал с выхода этого элемента воздействует на первый вход исполнительного механизма 16, которьнй уменьшает обороты рабочего колеса на величину Д п.
Одновременное выполнение условий
Q(t)Qmin И Ymin у (t) Ушах (ЛИНИЯ АВ НЗ
фиг.2) соответствует режиму, предшествующему началу заиления трубопровода, поэто-- му для увеличения напорной характеристики насоса необходимо увеличить скорость вращения рабочего колеса. При этом условии на втором выходе компаратора 222 блока 7 сравнения и на выходе элемента И 8 появляются единичные сигналы, которые поступают на входы элемента И 14. Сигналы с выхода этого элемента воздействует на второй вход исполнительного механизма 16, который увеличивает, обороты рабочего колеса на величину Д п.
Сигналы с выходов элементов И 11-14 поступают также на входы-табло 17 и чорел открытые элементы И 37, 38, 36 и 39 включают индикаторы 32,33,31 и 34 соответсгоу щих режимов, т.е. .Уменьшить папильонаж, Увеличить папильонаж, Уменьшить обороты двигателя или Увеличить обороты .двигателя. При этом на один из входов дешифратора 42 поступает единичный сигнал и на одном из его выходов появляется также единичный сигнал, который через элемент ИЛИ 41 открывает указанные.элементы И. В том случае если на табло 17, а значит и на исполнительные механизмы 15 и 16, поступают два и более управляющих сигналов одновремейно или ни одного (это свидетельствует о неисправности устройства), то такая комбинация на входе дешифратора 42 обеспечивает нулевые сигналы.на всех его входах. При этом нулевой сигнал с выхода элемента ИЛИ 41 закрывает указанные элементы И, через элемент НЕ 40 включает индикатор Переход на ручное управление и через элемент ИЛИ 24 переключает триггер 25 в нулевое состояние, в результате чего выключается тактовый генератор 5 и устройство прекращает работу. После этого оператор переходит на ручное управление, земснарядом до устранения неисправности в устройстве.
Таким образом устройство ведет непрерывное регулирование технологического процесса, что позволяет повысить производительность земснаряда за счет устранения неэффективных и аварийных режимов, т.е. заиления трубопровода и кавитации насоса.
При необходимости функции устройства могут быть видоизменены и расширены. Например, может быть изменен состав датчиков, в частности датчик расхода может быть заменен датчиком разрежения во вса- се, так как расчетному изменению расхода от Qc до QB соответствует определенное изменение разрежения от Нс до Нв (фиг.1), Программа расчета рабочих параметров мо-. жет быть дополнена другими программами, в частности программой расчета выработки земснаряда за установленное время, например суТки. Для этого показания датчиков 3 и 4 из буферных регистров 1-81 и 182 или непосредственно от датчиков через модуль ввода дискретных сигналов СМ 1800. 9301 необходимо передавать в СМ 1800, где рассчитывается выработка по формуле
тN
П / Q -ydt 2 Qiy,.
..
где I - моменты измерения параметров QI и
Я;
N - количество измерений в сутки.
Формула изобретения 1. Устройство для управления землесосным снарядом, содержащее датчики плотности и расхода гидросмеси, первый блок сравнения и первый исполнительный механизм, отличающееся тем, что, с целью повышения производительности за счет повышения точности регулирования рабочего режима, оно снабжено блоком вычисления, блоком ввода данных, тактовым генератором, семью элементами И, вторым блоком сравнения, вторым исполнительным механизмом и индикаторным табло, при этом выходы датчиков плотности и расхода гидросмеси соединены с первыми входами соответственно первого и второго блоков сравнения, блок ввода данных подключен к входу блока вычисления, выход которого соединен с вторыми входами обоих блоков сравнения, первый и второй выходы первого блока сравнения подключены к обоим входам первого элемента И, выход которого подключен к первым входам второго, третьего и четвертого элементов И, а третий и четвертый выходы первого блока сравнения соединены с первыми входами пятого и шестого элементов И, первый и второй выходы второго блока сравнения соединены с входами седьмого элемента И, а третий и четвертый выходы второго блока сравнения соединены с вторыми входами третьего и четвертого элементов И, выходы которых соединены с соответствующими входами первого исполнительного механизма и индикаторного табло, выход седьмого элемента И подключен к вторым входам второго, пятого и шестого элементов И, выходы которых подключены к соответствующим входам индикаторного табло, а выходы пятого и шестого элементов И соединены также с соответствующими входами второго исполнительного механизма, выход индикаторного табло подключен к входу тактового генератора, первый выход которого соединен с входами датчиков плотности и расхода гидросмеси, а второй - с третьими входами обоих блоков сравнения.
2.Устройство по п.1,отличающее с я тем, что каждый блок сравнения содер жит первый, второй и третий буферные ре гистры, а также первый и второй
компараторы, причем выход первого буфер ного регистра подключен к первым входам обоих компараторов, к вторым входам кото рых подключены выходы соответственно второго и третьего буферных регистров.
первый вход первого буферного регистра является одноименным входом блока срав нения, а объединенные входы второго и третьего буферных регистров являются вторым входом блока сравнения, третьим входом которого является второй вход первого буферного регистра, первым и вторым выходами блока сравнения являются первые вы ходы обоих компараторов, а третьим и четвертым выходами - соответственно вторые выходы обоих компараторов.
3.Устройство по п. 1,отличающее с я тем, что Тактовый генератор содержит элемент ИЛИ, триггер, элемент И, задающий генератор, делитель частоты и пере ключатель, причем выход переключателя соединен с первыми входами элемента ИЛИ и триггера, выход элеменка ИЛИ подключен к второму входу триггера, выход которого и
выход задающего генератора соединен с со ответствующими входами элемента И, вы ход которого подключен к делителю частоты, при этом второй вход элемента ИЛИ является входом тактового генератора,
а выходы элемента И и делителя частоты первым и вторым его выходами.
4.Устройство по п.1, о т л и ч а ю щ е е- с я тем, что индикаторное табло содержит
шесть индикаторов, пять элементов И, элемент НЕ, элемент ИЛИ и дешифратор, причем выходы дешифратора соединены с соответствующими входами элемента ИЛИ, выход которого подключен к первым входам
элементов И и входу элемента НЕ, выходы элементов И и элемента НЕ подключены к соответствующим индикаторам, при этом вторые входы элементов И объединены с входами дешифратора и являются входами
индикаторного табло, а выход элемента НЕ является его выходом.
Н
,к
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматизированного управления земснарядом | 1990 |
|
SU1803504A1 |
| Устройство для управления землесосным снарядом | 1989 |
|
SU1677196A1 |
| Устройство для управления землесосным снарядом | 1990 |
|
SU1717742A1 |
| Способ контроля степени износа грунтового насоса земснаряда | 1990 |
|
SU1787896A1 |
| Параллельный логический мультиконтроллер | 2016 |
|
RU2634199C1 |
| Устройство для контроля параметров | 1985 |
|
SU1254441A1 |
| Система автоматического управления процессом распылительной сушки | 1988 |
|
SU1629714A1 |
| Устройство для управления процессом грунтозабора землесосного снаряда | 1988 |
|
SU1555434A1 |
| Устройство для проверки функциональных блоков | 1980 |
|
SU1008745A1 |
| Устройство для измерения амплитуды сварочного тока | 1981 |
|
SU1009676A1 |

Изобретение относится к гидромеханизации, а именно к устройствам для автоматизации землесосных снарядов, используемых в транспортном строительстве и других отраслях народного хозяйства. Целью изобретения является повышение производительности за счет повышения точности регулирования рабочего режима. Для этого вычисляют максимальный и минимальный расход гидросмеси и максимальную и минимальную плотность гидросмеси. Затем сравнивают текущие значения расхода и плотности гидросмеси с вычисленными в блоках сравнения (БС) 6 и 7 соответственно. Если текущие параметры находятся в пределах вычисленных, то сигналы от БС 7 поступают через элементы И8, И10, И19 на вход табло 17 и включается индикатор Нормальный режим. Если текущие параметры выходят за пределы вычисленных, то на табло 17 загораются индикаторы, соответствующие образуемым режимам. 3 з.п.ф-лы, 6 ил. сл с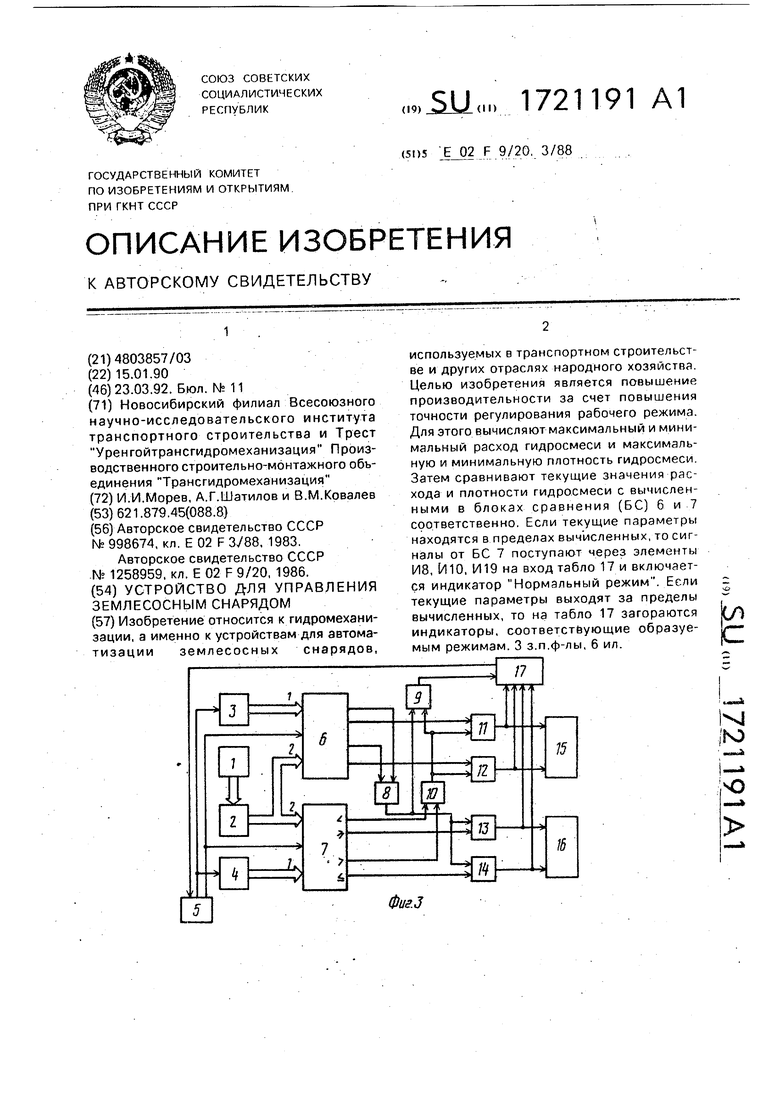
н
н
Ри&. i
//77CLX.
ч/m/i
Q.
max.
Q
QininQmax
Фиг.2
Фиг. 5
ФигЛ
sft.f
Фиг. 6
| Устройство для контроля технологических параметров процесса грунтозабора земснаряда | 1981 |
|
SU998674A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Гребенчатая передача | 1916 |
|
SU1983A1 |
| Устройство для управления землесосным снарядом | 1984 |
|
SU1258959A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
