Изобретение относится к управлению гидроподъемной системой, включающей каскад приемных емкостей с землесосами или эрлифтами и используемой в горнодобывающей промышленности для гидроподъема гидросмеси от дистанционно-рассредото- ченных источников (например, при возвращении в технологический процесс дренажных потоков на обогатительных фабриках).
Цель изобретения - расширение области применения.
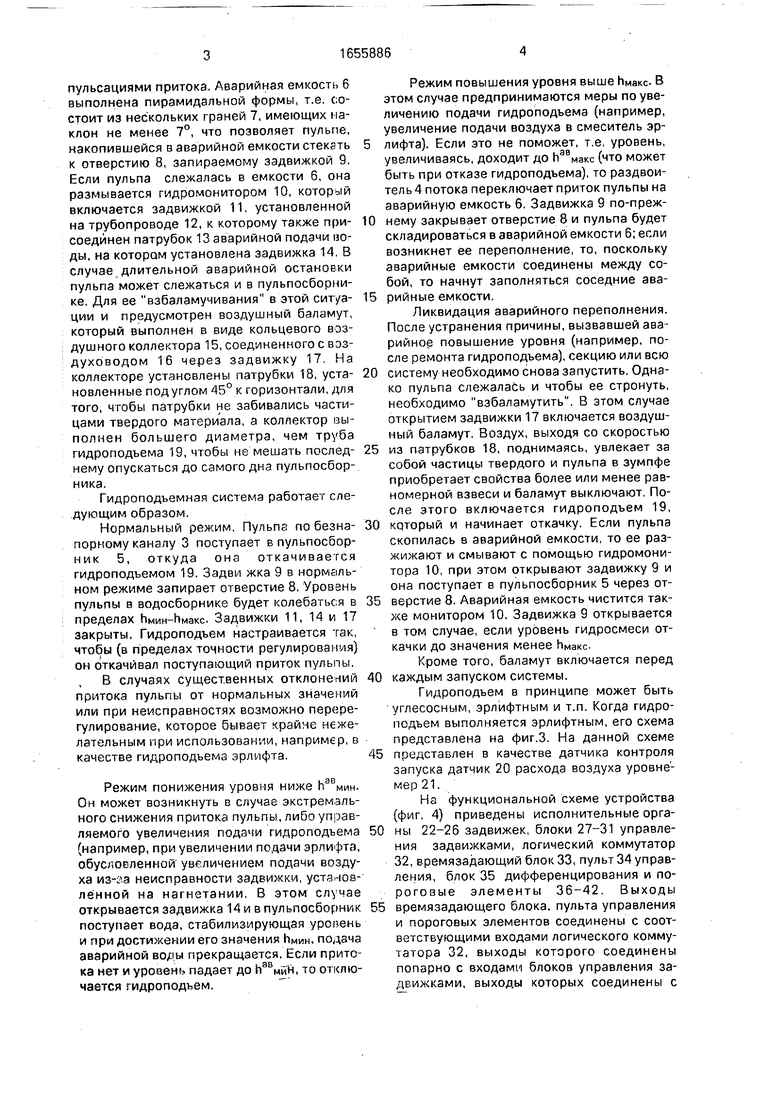
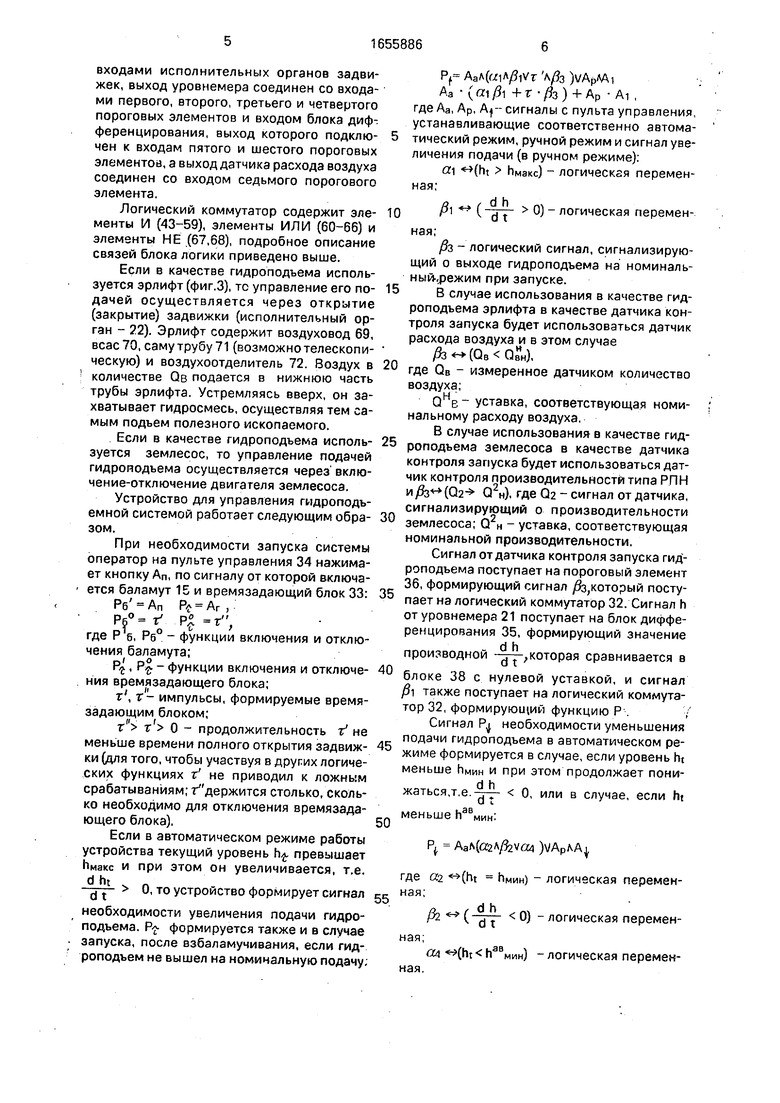
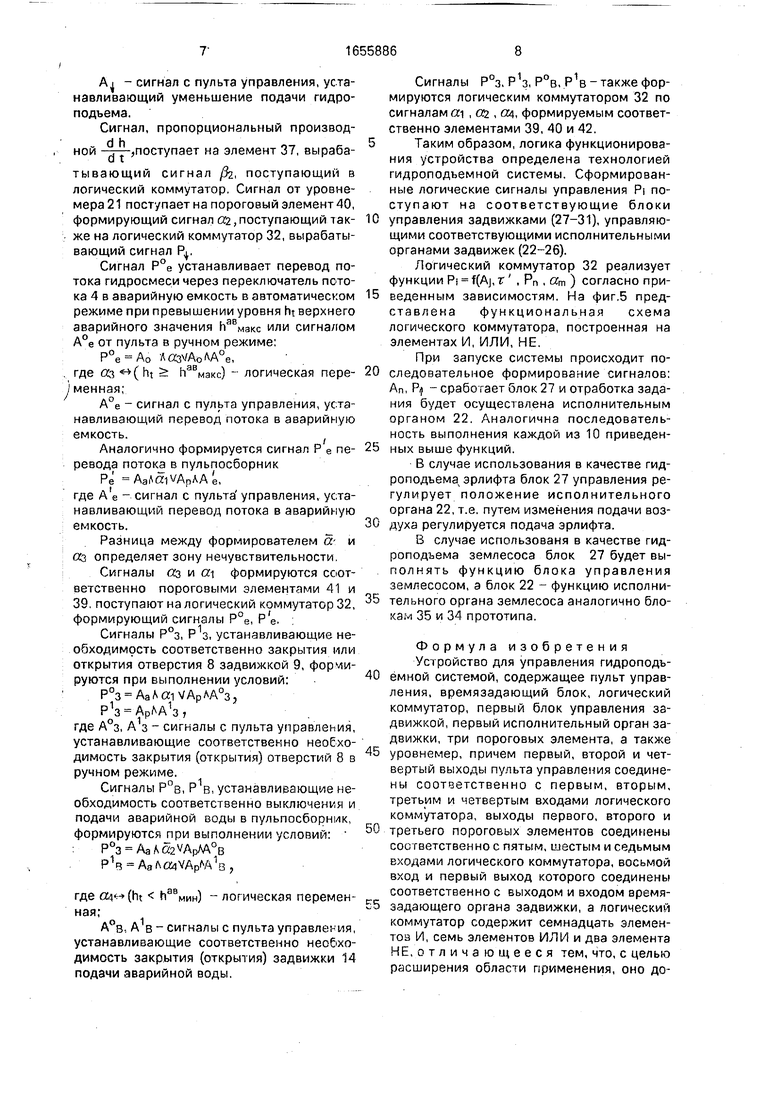
На фиг. 1 представлена схема гидроподъемной системы; на фиг.2 - то же, вид сверху; на фиг.З - фрагмент варианта гидроподъема, когда в его качестве используется
эрлифт; на фиг.4 - функциональная схема устройства для управления гидроподъемной системой; на фиг.5 - функциональная схема логического коммутатора.
Объект (фиг 1) содержит несколько однотипных секций 1 и 2, каждая из которых содержит безнапорный канал 3, на конце которого установлен раздвоитель (переключатель) 4 потоков, который, переключаясь, может направить входной безнапорный поток гидросмеси либо в (рабочий) пульпос- борник 5, либо в аварийную емкость 6. Пульпосборник 5 имеет переменное сечение по высоте, так как увеличение сечения в верхней части предназначено для сглаживания пульсаций уровня, обусловленных
О
ел ел
00 00
О
пульсациями притока. Аварийная емкость 6 выполнена пирамидальной формы, т.е. с.о- стоит из нескольких граней 7, имеющих па- клон не менее 7°, что позволяет пульпе, накопившейся в аварийной емкости стекзть к отверстию 8, запираемому задвижкой 9. Если пульпа слежалась в емкости 6, она размывается гидромонитором 10, которой включается задвижкой 11, установленной на трубопроводе 12, к которому также присоединен патрубок 13 аварийной подачи поды, на котором установлена задвижка 14, В случае длительной аварийной остановки пульпа может слежаться и в пульпосборни- ке. Для ее взбаламучивания в этой сит/а- ции и предусмотрен воздушный баламут, который выполнен в виде кольцевого вэз- душного коллектора 15, соединенного с вэз- духоводом 16 через задвижку 17 На коллекторе установлены патрубки 18, установленные под углом 45° к горизонтали, для того, чтобы патрубки не забивались частицами твердого материала, а коллектор выполнен большего диаметра, чем труба гидроподъема 19, чтобы не мешать последнему опускаться до самого дна пульпосбор- ника.
Гидроподъемная система работает следующим образом.
Нормальный режим. Пульпа по безнапорному каналу 3 поступает в пульпосбор- ник 5, откуда она откачивается гидроподъемом 19. Задви жка 9 в нормальном режиме запирает отверстие 8, Уровень пульпы в водосборнике будет колебаться в пределах пмин-пмакс. Задвижки 11, 14 и 17 закрыты. Гидроподъем настраивается так, чтобы (в пределах точности регулирования) он откачивал поступающий приток пульпы.
В случаях существенных отклонений притока пульпы от нормальных значений или при неисправностях возможно перерегулирование, которое бывает крайне нежелательным при использовании, например, в качестве гидроподъема эрлифта.
Режим понижения уровня ниже Ьавмин. Он может возникнуть в случае экстремального снижения притока пульпы, либо упоав- ляемого увеличения подачи гидроподъема (например, при увеличении подачи эрлифта, обусловленной увеличением подачи воздуха из-ч а неисправности задвижки, установленной на нагнетании, В этом случае открывается задвижка 14 и в пульпосборник поступает вода, стабилизирующая уровень и при достижении его значения Имин, подача аварийной во/зы прекращается. Если притока нет и уровень падает до павми н, то отключается гидроподъем.
Режим повышения уровня выше Ьмакс- В этом случае предпринимаются меры по увеличению подачи гидроподъема (например, увеличение подачи воздуха в смеситель эрлифта). Если это не поможет, т.е. уровень, увеличиваясь, доходит до ЬавМакс (что может быть при отказе гидроподъема), то раздвои- тель 4 потока переключает приток пульпы на аварийную емкость 6, Задвижка 9 по-преж0 нему закрывает отверстие 8 и пульпа будет складироваться в аварийной емкости 6; если возникнет ее переполнение, то, поскольку аварийные емкости соединены между собой, то начнут заполняться соседние ава5 рийные емкости.
Ликвидация аварийного переполнения. После устранения причины, вызвавшей аварийное повышение уровня (например, после ремонта гидроподъема), секцию или всю
0 систему необходимо снова запустить. Однако пульпа слежалась и чтобы ее стронуть, необходимо взбаламутить. В этом случае открытием задвижки 17 включается воздушный баламут, Воздух, выходя со скоростью
5 из патрубков 18, поднимаясь, увлекает за собой частицы твердого и пульпа в зумпфе приобретает свойства более или менее равномерной взвеси и баламут выключают После этого включается гидроподъем 19,
0 который и начинает откачку. Если пульпа скопилась в аварийной емкости, то ее разжижают и смывают с помощью гидромонитора 10, при этом открывают задвижку 9 и она поступает в пульпосборник 5 через от5 верстие 8. Аварийная емкость чистится также монитором 10. Задвижка 9 открывается в том случае, если уровень гидросмеси откачки до значения менее Ьмакс
Кроме того, баламут включается перед
0 каждым запуском системы.
Гидроподъем в принципе может быть углесосным, эрлифтным и т.п. Когда гидроподъем выполняется эрлифтным, его схема представлена на фиг.З. На данной схеме
5 представлен в качестве датчика контроля запуска датчик 20 расхода воздуха уровне - мер 21.
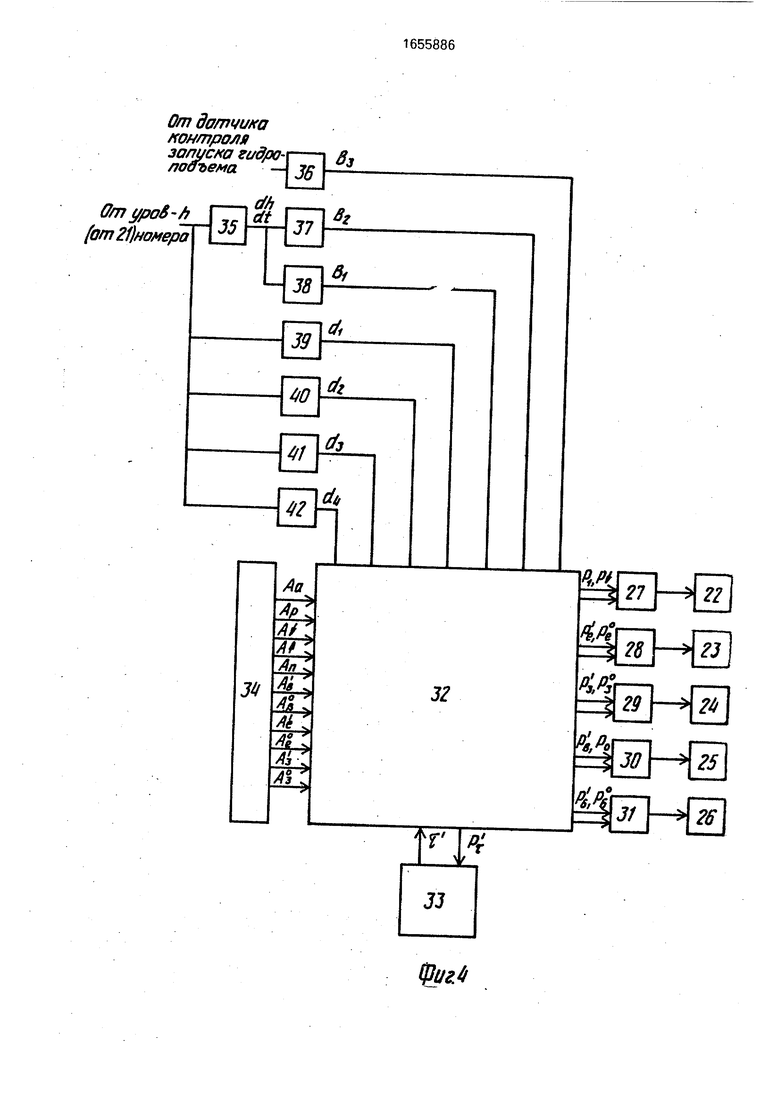
На функциональной схеме устройства (фиг, 4) приведены исполнительные орга0 ны 22-26 задвижек, блоки 27-31 управления задвижками, логический коммутатор 32, времязадающий блок 33, пульт 34 управления, блок 35 дифференцирования и пороговые элементы 36-42. Выходы
5 времязадающего блока, пульта управления и пороговых элементов соединены с соответствующими входами логического коммутатора 32, выходы которого соединены попарно с входами блоков управления задвижками, выходы которых соединены с
входами исполнительных органов задвижек, выход уровнемера соединен со входами первого, второго, третьего и четвертого пороговых элементов и входом блока дифференцирования, выход которого подклю- чен к входам пятого и шестого пороговых элементов, а выход датчика расхода воздуха соединен со входом седьмого порогового элемента.
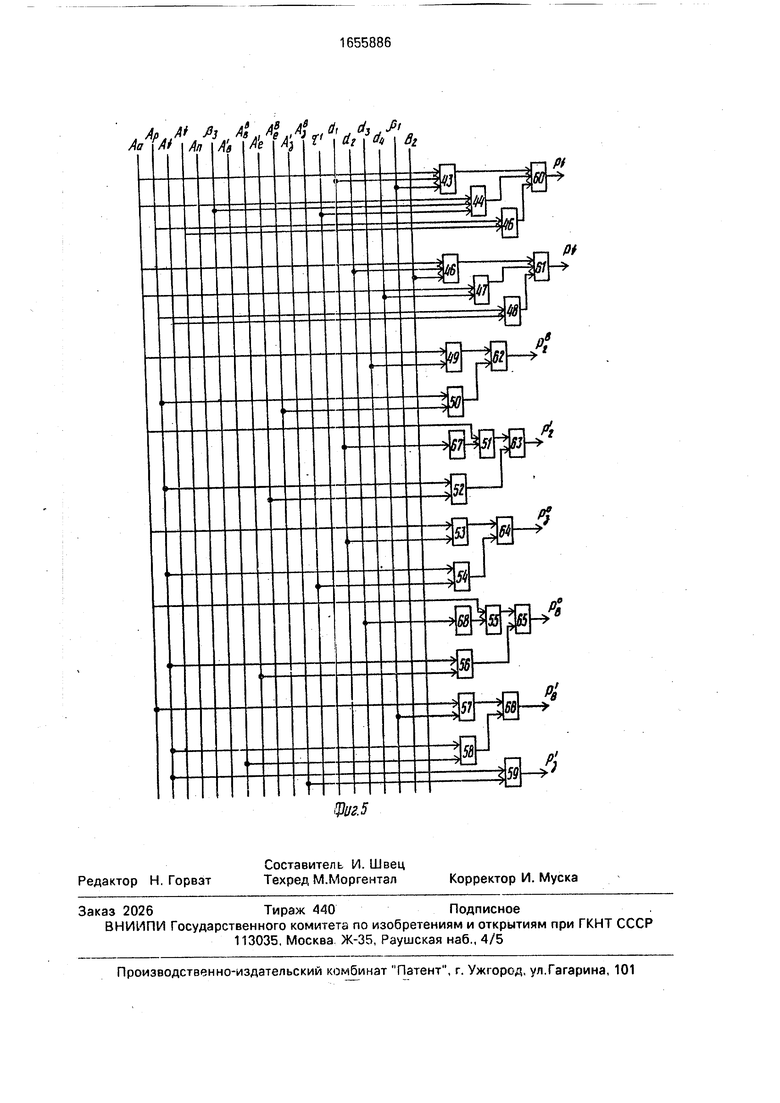
Логический коммутатор содержит эле- менты И (43-59), элементы ИЛИ (60-66) и элементы НЕ (67,68), подробное описание связей блока логики приведено выше.
Если в качестве гидроподъема используется эрлифт (фиг.З), тс управление его по- дачей осуществляется через открытие (закрытие) задвижки (исполнительный орган - 22). Эрлифт содержит воздуховод 69, всас 70, саму трубу 71 (возможно телескопи- ческую) и воздухоотделитель 72. Воздух в количестве QB подается в нижнюю часть трубы эрлифта. Устремляясь вверх, он захватывает гидросмесь, осуществляя тем самым подъем полезного ископаемого.
Если в качестве гидроподъема исполь- зуется землесос, то управление подачей гидроподъема осуществляется через включение-отключение двигателя землесоса.
Устройство для управления гидроподъемной системой работает следующим обра- зом.
При необходимости запуска системы оператор на пульте управления 34 нажимает кнопку Ап, по сигналу от которой включается баламут 15 и времязадающий блок 33:
Рб Ап Р Аг ,
PR° т РЈ г,
где Р б, Рб° - функции включения и отключения баламута;
РЈ , РЈ - функции включения и отключе- ния времязадающего блока;
т , т- импульсы, формируемые время- задающим блоком;
Т т 0 - продолжительность f1 не меньше времени полного открытия зэдвиж- ки (для того, чтобы участвуя в других логических функциях г не приводил к ложным срабатываниям; г держится столько, сколько необходимо для отключения времязадающего блока),
Если в автоматическом режиме работы устройства текущий уровень h. превышает Ьмакс и при этом он увеличивается, т.е.
- . 0, то устройство формирует сигнал
необходимости увеличения подачи гидроподъема. PJ- формируется также и в случае запуска, после взбаламучивания, если гидроподъем не вышел на номинальную подачу
Pf AaA(«lA/SiVr )VAPAA1 Аа («101 +Т -Дз)+Ар AI ,
где Аа, Ар, AJ- сигналы с пульта управления, устанавливающие соответственно автоматический режим, ручной режим и сигнал увеличения подачи (в ручном режиме):
en (ht Ьмакс) - логическая переменная;
( . 0) - логическая переменная;
- логический сигнал, сигнализирующий о выходе гидроподъема на номиналь- ный-.режим при запуске.
В случае использования в качестве гидроподъема эрлифта в качестве датчика контроля запуска будет использоваться датчик расхода воздуха и в этом случае
(),
где QB - измеренное датчиком количество воздуха;
QHE уставка, соответствующая номинальному расходу воздуха.
В случае использования в качестве гидроподъема землесоса в качестве датчика контроля запуска будет использоваться датчик контроля производительности типа РПН и/fe«-(Q2- 02н), где Qa - сигнал от датчика, сигнализирующий о производительности землесоса; 62Н - уставка, соответствующая номинальной производительности.
Сигнал отдатчика контроля запуска гидроподъема поступает на пороговый элемент 36, формирующий сигнал /Зз,который поступает на логический коммутатор 32. Сигнал h от уровнемера 21 поступает на блок дифференцирования 35, формирующий значение dh
производной
dt
которая сравнивается в
блоке 38 с нулевой уставкой, и сигнал также поступает на логический коммутатор 32, формирующий функцию Р .
Сигнал Р| необходимости уменьшения подачи гидролодъема в автоматическом режиме формируется в случае, если уровень ht меньше ЬМин и при этом продолжает понижаться, т.е. 0, или в случае, если hi о с
меньше павмин:
PJ. AaA(a2A/%vo4 )VAPA,A
где «2 (ht пмин) - логическая переменная;
fh ( . 0) - логическая переменная,
ОА (ht павмин) -логическая переменная.
A i - сигнал с пульта управления, устанавливающий уменьшение подачи гидроподъема.
Сигнал, пропорциональный производной -:- поступает на элемент 37, вырабатывающий сигнал /%, поступающий в логический коммутатор. Сигнал от уровнемера 21 поступает на пороговый элемент 40, формирующий сигнал аг, поступающий также на логический коммутатор 32, вырабатывающий сигнал Р,
Сигнал Р°е устанавливает перевод потока гидросмеси через переключатель потока 4 в аварийную емкость в автоматическом режиме при превышении уровня ht верхнего аварийного значения павмакс или сигналом А°е от пульта в ручном режиме:
Р°е А0 Лаз А0ЛА°е,
где «з (ht павмакс) - логическая пере- )менная;
А°е - сигнал с пульта управления, устанавливающий перевод потока в аварийную емкость.t
Аналогично формируется сигнал Р е перевода потока в пульпосборник
Ре АаШ1 /АрЛАе,
где А е - сигнал с пульта управления, устанавливающий перевод потока в аварийную емкость.
Разница между формирователем а и аз определяет зону нечувствительности
Сигналы «з и а формируются соответственно пороговыми элементами 41 и 39, поступают на логический коммутатор 32, формирующий сигналы Р°е, Р е.
Сигналы Р°з, Р з, устанавливающие необходимость соответственно закрытия или открытия отверстия 8 задвижкой 9, формируются при выполнении условий:
P°3 AaAaiVApAA03,
Р1з АрАА1з,
где А°з, А з сигналы с пульта управления, устанавливающие соответственно необходимость закрытия (открытия) отверстий 8 в ручном режиме.
Сигналы Р°в, Р1в, устанавливающие необходимость соответственно выключения и подачи аварийной воды в пульпосборник, формируются при выполнении условий:
P°3 AaAa2VAp/A°B
Р1В АаЛ04УАр А1в,
где O4 -(ht Иавмин) - логическая переменная;
А°в- А1в - сигналы с пульта управления, устанавливающие соответственно необходимость закрытия (открытия) задвижки 14 подачи аварийной воды.
Сигналы Р°з, Р1з, Р°в, Р1в - также формируются логическим коммутатором 32 по сигналам а ,, формируемым соответственно элементами 39, 40 и 42.
Таким образом, логика функционирования устройства определена технологией гидроподъемной системы. Сформированные логические сигналы управления Pi поступают на соответствующие блоки
управления задвижками (27-31), управляющими соответствующими исполнительными органами задвижек (22-26).
Логический коммутатор 32 реализует функции Pi f(Aj, т , Pn . Zm ) согласно приведенным зависимостям. На фиг.5 представлена функциональная схема логического коммутатора, построенная на элементах И, ИЛИ, НЕ.
При запуске системы происходит последовательное формирование сигналов: An, P/i - сработает блок 27 и отработка задания будет осуществлена исполнительным органом 22. Аналогична последовательность выполнения каждой из 10 приведенных выше функций.
В случае использования в качестве гидроподъема эрлифта блок 27 управления регулирует положение исполнительного органа 22, т.е. путем изменения подачи воздуха регулируется подача эрлифта.
В случае использованя в качестве гидроподъема землесоса блок 27 будет вы- полнять функцию блока управления землесосом, а блок 22 - функцию исполнительного органа землесоса аналогично блокам 35 и 34 прототипа.
Формула изобретения Устройство для управления гидроподъемной системой, содержащее пульт управления, времязадающий блок, логический коммутатор, первый блок управления задвижкой, первый исполнительный орган задвижки, три пороговых элемента, а также
уровнемер, причем первый, второй и четвертый выходы пульта управления соединены соответственно с первым, вторым, третьим и четвертым входами логического коммутатора, выходы первого, второго и
третьего пороговых элементов соединены соответственное пятым, шестым и седьмым входами логического коммутатора, восьмой вход и первый выход которого соединены соответственно с выходом и входом времязадающего органа задвижки, а логический коммутатор содержит семнадцать элементов И, семь элементов ИЛИ и два элемента НЕ, отличающееся тем, что, с целью расширения области применения, оно дополнительно содержит датчик контроля запуска гидроподъема, блок дифференцирования, четвертый, пятый, шестой и седьмой пороговые элементы, второй, третий, четвертый и пятый блоки управления задвижкой, второй, третий, четвертый и пятый исполнительные органы задвижки, причем пятый, шестой, седьмой, восьмой, девятый и одиннадцатый выходы пульта управления соединены соответственно с девятнадцатым, десятым, одиннадцатым, двенадцатым, тринадцатым, четырнадцатым и пятнадцатым входами логического коммутатора, выходы четвертого, пятого, шестого и седьмого пороговых элементов подключены соответственно к семнадцатому, восемнадцатому, девятнадцатому и девятому входам логического коммутатора, второй, третий, четвертый, пятый, шестой, седьмой, восьмой, девятый, десятый и одиннадцатый выходы логического коммутатора подключены попарно к входам соответственно первого, второго, третьего, четвертого и пятого блоков управления задвижкой, причем выход уровнемера соединен с входами соответственно первого, второго, третьего и четвертого пороговых элементов и с входом блока дифференцирования, выход которого подключен к входам пятого и шестого пороговых элементов, а выход датчика расхода воздуха подключен к входу седьмого порогового элемента, первый вход логического коммутатора является первым входом первого, второго, четвертого, пятого, седьмого, девятого, одиннадцатого, тринадцатого и пятнадцатого элементов И, второй вход - первым входом третьего, шестого, восьмого, десятого, двенадцатого, четырнадцатого, шестнадцатого и семнадцатого элементов И, третьим входом логического коммутатора является второй вход шестого элемента И, четвертым входом - второй вход третьего элемента И, пятым входом - второй вход пятого и пятнадцатого элементов И, шестым входом - второй вход седьмого элемента И, седьмым входом -- вход второго элемента НЕ, восьмым входом - второй вход первого элемента И, девятым входом - второй вход второго элемента И, десятым входом - второй вход четырнадцатого элемента И, одиннадцатым входом - второй вход четырнадцатого элемента И, двенадцатым входом - второй вход десятого элемента И, тринадцатым входом -. второй вход восьмого элемента И, четырнадцатым входом - второй вход семнадцатого элемента И, пятнадцатым входом второй вход двенадцатого элемента И, шестнадцатым входом - вход первого элемента НЕ и второй вход одиннадцатого элемента И, семнадцатым входом - третий вход четвертого элемента И, восемнадцатым входом - третий вход первого элемента И, причем выходы первого, второго и третьего элементов И подключены соответственно к первому, второму и третьему входам первого элемента ИЛИ, выход которого является
вторым выходом логического коммутатора, выходы четвертого, пятого и шестого элементов И подключены соответственно к первому, второму и третьему входам второго элемента ИЛИ, выход которого является
третьим выходом логического коммутатора, выходы седьмого и восьмого эпементов И подключены соответственно к первому и второму входам третьего элемента ИЛИ, выход которого является четвертым выходом логического коммутатора, выход первого элемента ИЛИ подключен к второму входу девятого элемента И, выход которого подключен к первому входу четвертого элемента ИЛИ, второй вход которого соединен
с выходом десятого элемента И, а выход является пятым выходом логического коммутатора, выходы одиннадцатого и двенадцатого элементов И подсоединены к первому и второму входам пятого элемента
ИЛИ, выход которого является шестым выходом логического коммутатора, выход семнадцатого элемента И является седьмым выходом логического коммутатора, выход второго элемента НЕ подключен к второму
входу тринадцатого элемента И, выход которого подключен к первому входу шестого элемента ИЛИ, второй вход которого подключен к выходу четырнадцатого элемента И, а выход является восьмым выходом ло ического коммутатора, выходы пятнадцатого и шестнадцатого элементов И подключены соответственно к первому и второму входам седьмого элемента ИЛИ, выход которого является девятым выходом логического коммутатора, девятнадцатый вход которого соединен с первым и десятым выходами, а восьмой вход - с одиннадцатым выходом логического коммутатора.
Фиг.2
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления водоснабжением участка гидрошахты | 1982 |
|
SU1115020A1 |
| КОНТРОЛЛЕР | 1999 |
|
RU2166205C2 |
| Устройство для оценки профессиональной пригодности операторов | 1989 |
|
SU1647620A1 |
| Устройство для обмена информацией | 1982 |
|
SU1131035A1 |
| Устройство для контроля и сигнализации о состоянии распределенных объектов | 1987 |
|
SU1608719A1 |
| Устройство для ввода информации | 1983 |
|
SU1109733A1 |
| Система регулирования газоперекачивающих агрегатов | 1984 |
|
SU1249199A1 |
| Устройство для контроля состояния распределенных объектов | 1985 |
|
SU1285509A1 |
| ЗАДАЮЩЕЕ УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ | 2004 |
|
RU2277043C1 |
| Устройство для диагностирования логических блоков | 1982 |
|
SU1071978A1 |
Изобретение касается управления гидроподъемной системой, включающей каскад приемных емкостей с землесосами или эрлифтами и используемой в горнодобывающей промышленности для гидроподъема гидросмеси от дистанционно-рассредото- ченных источников (например, при возвращении в технологический процесс дренажных потоков на обогатительных фабриках). Цель изобретения - расширение области применения. Устройство для управления гидроподъемной системой, содержащее пульт управления, логический коммутатор, времязадающий блок, первый блок управления задвижкой, первый исполнительный орган задвижки, первый, второй и третий пороговые элементы, а также уровнемер, дополнительно содержит датчик контроля запуска гидроподъема, блок дифференцирования, четвертый, пятый, шестой и седьмой пороговые элементы, второй, третий четвертый и пятый блоки управления задвижкой. 5 ил,
От датчика контроля запуска еидоо-, лооъема -J
От ypo6-fy (от21)номера
dh dt
Фиг4
VAV V« il V
| Устройство управления эрлифтом | 1985 |
|
SU1341394A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
