Известны вибрационные лотки, включающие грузонесущий орган, приводимый в колебательное движение от электромагнитного вибратора и соединенный при помощи упругой системы с реактивной массой. В предложенном вибролотке упругая система выполнена в виде двух групп плоских пружин: поперечных длинных, установленных под углом к вертикали и соединенных в своей средней части с грузонесущим органом, и продольных коротких, соединенных при помощи кронщтейнов с реактивной массой, выполненной в виде двух равных масс. Такое конструктивное выполнение упругой системы позволяет увеличить скорость транспортирования деталей, снизить частоту рабочих колебаний и повысить к. п. д. вибратора.
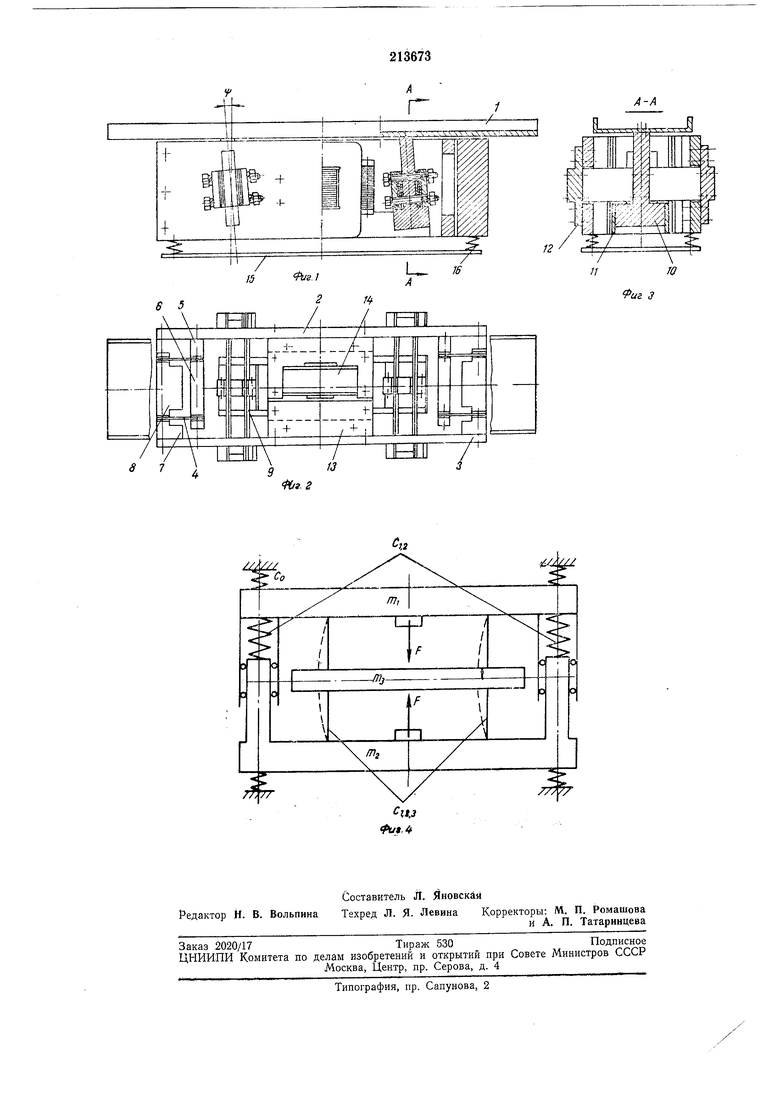
На фиг. 1 дан общий вид вибрационного лотка, вид спереди; на фиг. 2 - то же, вид сверху; на фиг. 3 - разрез по Л-А на фиг. 1; на фиг. 4 - динамическая схема конструкции. Грузонесущий орган в виде желоба 1 соединен при помощи упругой системы с реактивной массой, выполненной в виде щек 2 и 3, связанных между собой продольными короткими пружинами 4 при помощи кронщтейнов 5, 6, 7 и 8.
бом / при помощи кронщтейнов JO, нижняя часть которых связана с тягами 11. Пружины 9 установлены под углом к вертикали. Концы пружин 9 закреплены на щеках 2 и 5 при помощи бащмаков }2. Желоб / приводится в колебательное движение от электромагнитного вибратора, якорь 13 которого закреплен на щеке 3, а электромагнит 14 - на щеке 2. Вся конструкция лотка опирается на основание /5 при помощи амортизаторов 16. Щеки 2, электромагнит 14, кронштейны 5 и 6 - масса mj (фиг. 4); щека 3, якорь 13, кронщтейны 7 и 8 - масса желоб 1, кронштейны 10 и тяги и - масса т-. Пружинам
с жесткостью Со соответствуют амортизаторы, пружинам с жесткостью Ci,2 - пружины 4, а пружинам с жесткостью Ci,2,3 - пружины 9. Электромагнитный вибратор соответствует двум противоположно направленным периодическим силам F, приложенным к массам mi и т2. Пружины с жесткостью Ci,2 так расположены, что дают возможность массам т и т2 перемещаться относительно друг друга только в направлении, параллельном пружинам Ci,2,3 . При этом длинные пружины 1,2,3 испытывают продольный изгиб, а масса /Пз перемещается в направлении, нормальном к ним. В процессе колебаний системы, возбуждаествовать не только продольные динамические силы масс mj и /П2 и продольные силы F, нэ и поперечная динамическая сила массы /Пд, в результате чего пружины Ci,2.3 будут работать в продольно-поперечном изгибе. При этом массы mj и /Па будут совершать сложные колебания: в поперечном направлении - в противофазе друг к другу, а в продольном направлении - как одно целое в противофазе с массой Шз. Масса т вместе с желобом будет совершать только нормальные к пружинам С 1,2,3 колебания, за счет чего и осуществляется перемеш,ение штучных заготовок по желобу. Паразитные колебания устраняются в результате определенного расположения масс т, т2, т. Массы OTI и т выполняются равными, а их центры тяжести лежат на прямой, параллельной осям пружин С 1,2,3 . Первое условие обеспечивает неподвижность в поперечном направлении средних точек пружин Ci,2,3 , т. е. устранение поперечных колебаний желоба, а второе - устраняет крутильные колебания системы относительно продольной оси. Общий центр тяжести масс т и П2 и центр тяжести массы т лежат на прямой, нормальной к пружинам 1,2,3 , чем достигается уравновешенность динамических усилий в этом направлении и устранение наразитных крутильных колебаний относительно поперечной оси. Полному периоду поперечных колебаний масс т и т соответствуют лишь полпериода продольных колебаний массы /Пз, т. е. в предложенной системе вибратор будет возбуждать поперечные колебания масс т и та с малой амплитудой и частотой 50 гц и продольные колебания большой амплитуды масс (ffii-j-mg) и /Пз с частотой 25 гц.
Предмет изобретения
Вибрационный лоток, включающий грузонесущий орган, приводимый в колебательное
движение от электромагнитного вибратора и соединенный при помощи упругой системы с реактивной массой, отличающийся тем, что, с целью увеличения скорости транспортировав НИН деталей, снижения частоты рабочих колебаний и повыщения к. п. д. вибратора, упругая система выполнена в виде двух групп плоских пружин; поперечных длинных, установленных под углом к вертикали и срединенных в своей средней части с грузонесущим
органом, и продольных коротких, соединенных при помощи кронщтейнов с реактивной массой, выполненной в виде двух равных масс.

| название | год | авторы | номер документа |
|---|---|---|---|
| ВИБРАЦИОННЫЙ ЛОТОК-ТРАНСПОРТЕР | 1967 |
|
SU205679A1 |
| йиьСОЮЗмА ЯicfJIMf! л ?VEI4'.?rr-W.'? 1Ы\ I «SM t bAsIf! iXvJsfLj^NrSflHOTr'iA | 1973 |
|
SU388973A1 |
| ВЕРТИКАЛЬНЫЙ ВИБРАЦИОННЫЙ КОНВЕЙЕР | 1972 |
|
SU331994A1 |
| Вибрационный питатель | 1961 |
|
SU142938A1 |
| НИЗКОЧАСТОТНЫЙ ВИБРАЦИОННЫЙ ЛОТОК- ТРАНСПОРТЕР | 1967 |
|
SU202766A1 |
| ВИБРАЦИОННЫЙ ПИТАТЕЛЬ | 1967 |
|
SU206395A1 |
| Устройство для вибрационного транспортирования материалов | 1971 |
|
SU477076A1 |
| ВИБРАЦИОННЫЙ ЛОТОК С БИГАРМОНИЧЕСКИМ ЗАКОНОМ КОЛЕБАНИЙ РАБОЧЕГО ОРГАНА | 1969 |
|
SU255108A1 |
| Загрузочное устройство конвейера | 1990 |
|
SU1773821A1 |
| ВЕРТИКАЛЬНЫЙ ВИБРАЦИОННЫЙ КОНВЕЙЕР | 1972 |
|
SU337311A1 |