Известные устройства для взвешивания движущихся объектов, содержащие грузоприемную платформу, тензодатчики и цифровой автокомпенсатор, с увеличением быстродействия снижают точность. Это не дает возможности проводить многопробные измерения за короткий промежуток времени для снижения динамической погрешности, несимметричной относительно статического веса и имеющей случайный характер при взвешивании на ходу.
Кроме того, в известных устройствах определяют вес «брутто».
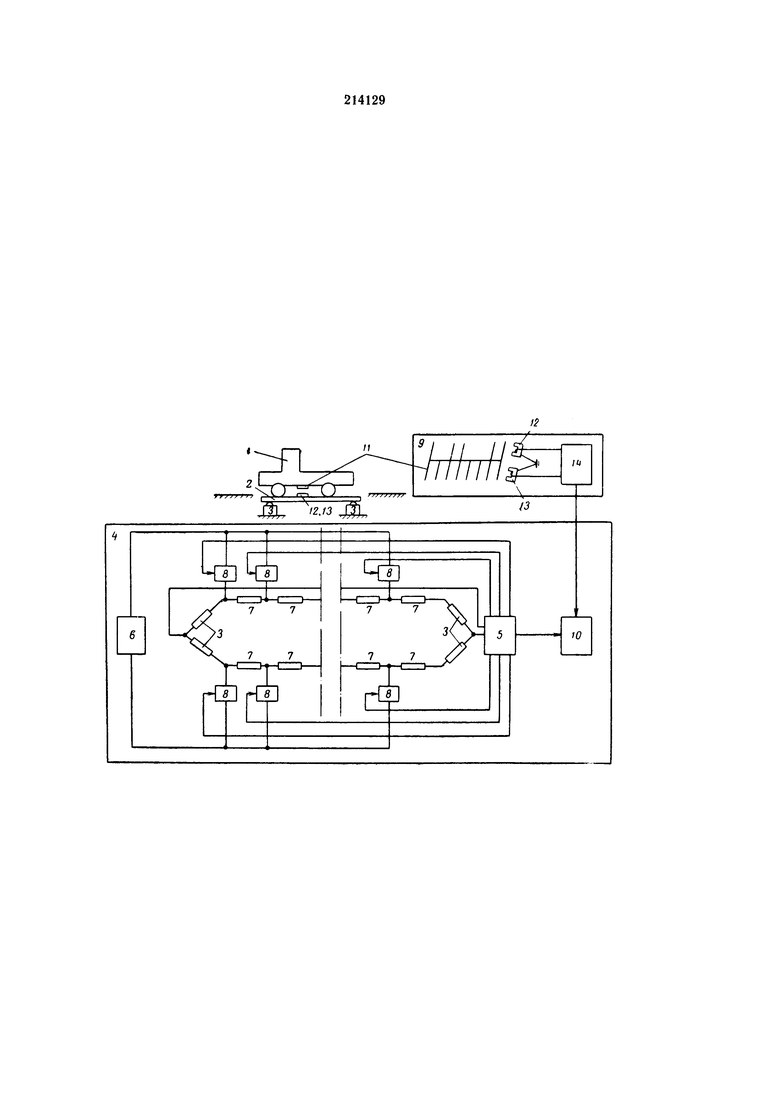
В предлагаемом устройстве блок питания цифрового моста выполнен с несколькими выходами, число которых равно числу балансировочных сопротивлений, причем, каждый из выходов блока питания подключен к балансировочному сопротивлению через бесконтактный ключ, а входы бесконтактных ключей подключены к выходам схемы управления балансировкой. Кроме того, выходной регистр цифрового моста выполнен в виде реверсивного счетчика, к суммирующему входу которого подключен выход схемы управления реверсом, а к вычитающему - выход устройства считывания собственного веса объекта. На чертеже представлена структурная схема предлагаемого устройства.
Устройство работает следующим образом.
При воздействии груза 1 через платформу 2 на тензометры 3, последние изменяют свое первоначальное сопротивление, вызывая разбаланс цифрового моста 4. Напряжение разбаланса диагонали моста воздействует на схему управления балансировкой 5, и она начинает балансировать мост.
Балансировку осуществляют изменением точек подключения источника 6 питания. Эти точки разделены балансировочными сопротивлениями 7. Выбор точек подключения питания осуществляет схема управления балансировкой путем переключения ключей 8. Таким образом, изменение сопротивления тензометров компенсируется изменением первоначального соотношения плеч с помощью балансировочных сопротивлений. Ключи 8, коммутирующие балансировочные сопротивления, не входят ни в одно из плеч моста, а потому и их качество и изменение их свойств с увеличением быстродействия не влияет на конечный результат, так как цифровой мост работает на баланс. Собственный вес объекта считывается схемой 9 и заносится на вычитающий вход выходного регистра 10, на суммирующий же вход последнего поступает результат измерения. Считывание собственного веса осуществляют по закрепленной на объекте кодовой гребенке 11 считывающих головок 12 и 13, которые устанавливают на платформе 14 регистра памяти. Окончательный результат, записанный в выходном регистре 10, соответствует весу «нетто» груза.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического взвешивания массы груза на движущихся объектах | 1978 |
|
SU739343A1 |
| ТРАНСПОРТНОЕ ВЕСОВОЕ УСТРОЙСТВО | 1992 |
|
RU2046300C1 |
| Устройство для весового учета вывозимых автомашинами горячих асфальтобетонных смесей | 1984 |
|
SU1182274A1 |
| МАССОМЕТРИЧЕСКИЙ СПОСОБ АВТОМАТИЧЕСКОГО ОПРЕДЕЛЕНИЯ ВЕСА ГРУЗА И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2148800C1 |
| Дискретное весоизмерительное устройство | 1980 |
|
SU932257A1 |
| МНОГОКАНАЛЬНОЕ ТЕНЗОМЕТРИЧЕСКОЕ УСТРОЙСТВО | 2003 |
|
RU2249190C1 |
| УСТРОЙСТВО ДЛЯ ВЗВЕШИВАНИЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 1994 |
|
RU2105270C1 |
| АВТОМАТИЧЕСКИЕ ВЕСЫ | 1969 |
|
SU246110A1 |
| Устройство для взвешивания движущихся железнодорожных составов | 1982 |
|
SU1089427A1 |
| МАССОМЕТРИЧЕСКИЙ СПОСОБ ВЫСОКОТОЧНОГО ОПРЕДЕЛЕНИЯ ВЕСА ГРУЗА И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2334955C1 |
1. Устройство для взвешивания движущихся объектов, содержащее грузоприемную платформу, тензодатчики, цифровой автоматический измерительный мост с схемой управления балансировкой, балансировочными сопротивлениями и бесконтактными ключами и схему считывания собственного веса, отличающееся тем, что, с целью повышения точности, в нем цифровой мост содержит источник питания с несколькими выходами, число которых равно числу балансировочных сопротивлений, причем каждый из выходов источника питания подключен к соответствующему балансировочному сопротивлению через бесконтактный ключ, а входы бесконтактных ключей подключены к выходам схемы управления балансировкой.
2. Устройство по п. 1, отличающееся тем, что, с целью определения веса «нетто» груза, выходной регистр цифрового моста выполнен в виде реверсивного счетчика, суммирующий вход которого подключен к схеме управления балансировкой, а вычитающий вход - к выходу устройства считывания собственного веса объекта, закодированного помещенной на этом объекте кодовой гребенкой.
