Предлагаемая машина, предназначенная для рассаживания растений, относится к машинам, в которых для пере мещения растений служат два параллельно расположенных ленточных транспортера, приводимых в движение с равной скоростью и установленных с некоторым взаимном смещением их передних концов в продольном направлении.
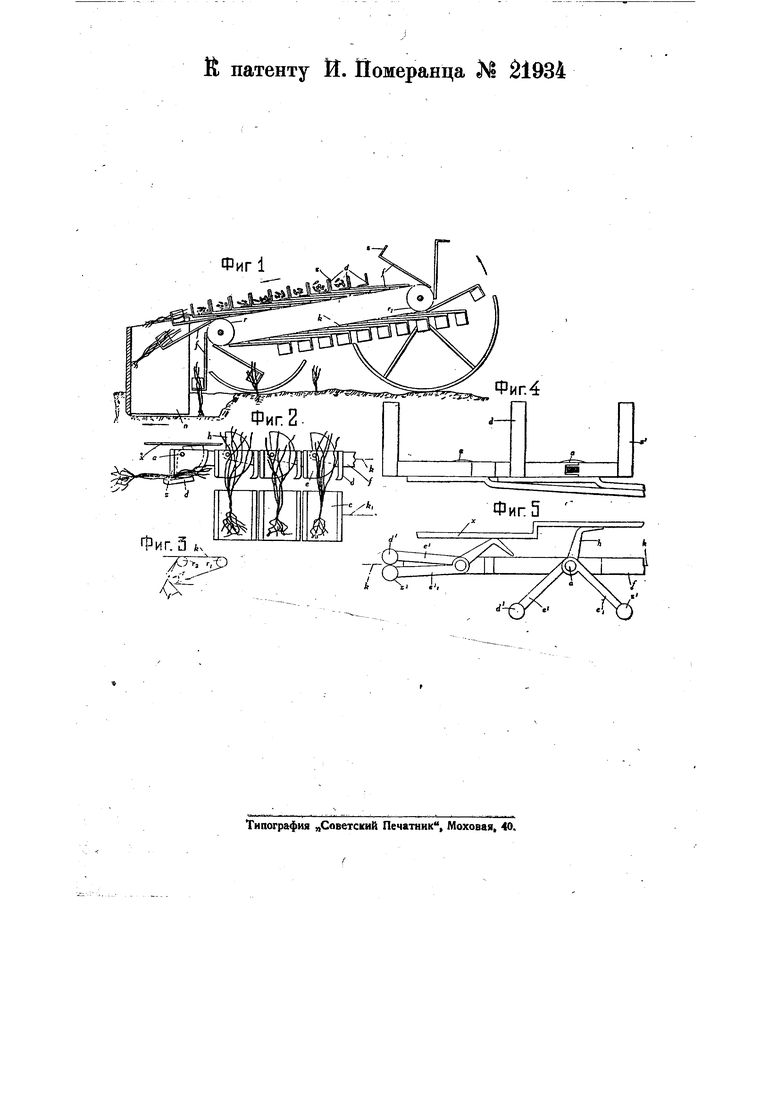
На схематическом чертеже фиг. 1 изображает боковой вид машины; фиг. 2- частичный вид сверху транспортирующего устройства; фиг, 3, 4 и 5-другие формы выполнения.
Машина состоит из парного ленточного транспортера «, «i (фиг. 1 и 2), примененного для подачи растений непосредственно в открываемую сошником п борозду. Верхние несущие ветви транспортеров к и KI, установленные в одной плоскости горизонтал{ но или с небольшим наклоном вперед, движутся с одинаковой скоростью, и конец (передний) транспортера к несколько выступает за конец транспортера KI, К звеньям цепи последнего 11рнсоединены корытообразные элементы с, служащие для поддержания корневой части растения, а к звеньям цепи другого транспортера к прикреплены
рычаги f, переходящие на сворм свободном конце в выступы , поддерживающие , площадки е. Последние служат опорой для стеблевой части растений и находятся на некотором расстоянии от рычагов f.
На рычагах f транспортера «, кроме того, установлены поворотно на шарнирах а особые фигурные элементы, снабженные поворотной пластиной d, перпендикулярной к п.(екости рычага f, и частью А, при чем средняя часть этих элементов, соединяющая часть h с пластиной р, расположена под площадкой е, и в пределах верхней несущей ветви транспортера часть h выступает за линию последнего.
Действие транспортеров заключается в следующем. Растения, уложенные на транспортеры, как указано выше, до момента сбегания несущей ветви транспортера Kj перемещаются в положении, параллельном друг Другу и перпендикулярном к линии транспортеров. В момент сбегация верхней ветви более короткого транспортера «i со шкива, когда корневая часть растения остается на весу, часть А встречает неподвижную направляющую х, вследствие чего пласпгака d поворачяBkeTCft, перемещая растение из поперечного в продрлъное положение и прижимая его стёблеву1р часть к.ьыступуг (фиг. 2). В таком продольном положении растение перемещается в борозду, проходя через полость сошника п,, и в момент достижения рычагом f (а следовательно и растением) вертикального положения, засыпается почвой. Освобождение растений из зажима происходит после сбегания части h с направляющей х и достигается или удерживающей силой почвы, или же путем раздвигания пластины d и выступа пружиной, на чертеже не показанной. Возвращение пластины d в.- исходное положение обусловлено действием момента силы веса части h, поворачивающего весь элемент около, шарнира а при переходе звеньев транспортера через шкив Г1 (фиг. 1 и 2). На фиг. 3 представлен вариант устройства с применением третьего, дополнительного шкива Гг, позволяющего увеличивать длину лент от подающей их части до момента посадки. На фиг. 4 и 5 вместо пластины d и выступа , применены штифты d и 2, установленные на рычагах е и еь поворотных около шарнира а рычага f, из которых рычаг el снабжен хвостом h, взаимодействующим со ступенчатой направляющей X. Действие штифтов аналогично действию пластин d и выступов г в упомянутом выше основном варианте устройства: встречая направляющую х, хвост h поворачивает штифт и прижимает им растение к штифто d, затем под действием выступаю1 ш части направляющей оба штифта поворачиваются вместёчьрдстением до приведения его в продольное положение, с целью перемещения растецщ тем же порядком в открываёмую сбшником борозду. Предмет патента. 41 / 1.Машина для посадки растений с двум%, параллельными транспортерами различной длины, движущимися с равиой скоростью, отличающаяся тем, что на прикрепленных к ленте транспортера « большей длины рычагах f, снабженных выступами г и площадками е для поддержания стеблевой части растений, установлень поворотные пластины d, служащие, при вращении их около шарнира а под действием на их выступающую часть h неподвижнОй направляющей х,- для поворачивания растений из поперечного положения в продольное и для прижимания их пластиною d к выступу z с целью последующего приведения их в вертикал1 ное положение в момент засыпания почвой (фиг. 1 и 2). 2.Видоизменение указанной в п. 1 машины, отличающееся тем, что вместо Пластины d и выступа применены штифты d и , установленные соответственно на рычагах е и el, а для смыкания штифтов, с целью захватывания растения и для последующего поворачивания рычагов е , ej, вместе с растением в продольное положение, предназначена неподвижная ступенчатая направляющая ж, действующая на хвост и, рычага е (фиг. 4, 5). 3.При указанной в п.п. 1 и 2 машине применение дополнительного третьего шкива Г2, с целью увеличения дли&ы ге«т- т подающей их части до момёята посадки растений (фнг. 3).
Фиг1
Фиг.4
| название | год | авторы | номер документа |
|---|---|---|---|
| Машина для рассаживания растений | 1929 |
|
SU24829A1 |
| ПОСАДОЧНАЯ МАШИНА | 1930 |
|
SU23004A1 |
| РАССТИЛОЧНОЕ УСТРОЙСТВО К ЛЬНОУБОРОЧНЫМ МАШИНАМ | 2024 |
|
RU2834953C1 |
| СПОСОБ И УСТРОЙСТВО МЕХАНИЗИРОВАННОЙ ВЫСАДКИ В ПОЧВУ РАСТЕНИЙ, РАЗМНОЖЕННЫХ В ЯЧЕЙКАХ ЛЕНТЫ IN VITRO, УСТРОЙСТВО МЕХАНИЗИРОВАННОГО НАПОЛНЕНИЯ СУБСТРАТОМ НИЖНИХ ЧАСТЕЙ ЯЧЕЕК ЛЕНТЫ И УСТРОЙСТВО ДЛЯ МЕХАНИЗИРОВАННОГО СОЗДАНИЯ ПОКРЫТИЯ НАД РАСТЕНИЯМИ | 1996 |
|
RU2147396C1 |
| Машина для посадки растений | 1929 |
|
SU20848A1 |
| ТЕРЕБИЛЬНЫЙ АППАРАТ ЛЬНОУБОРОЧНОЙ МАШИНЫ | 2013 |
|
RU2552428C1 |
| Посадочная машина | 1931 |
|
SU28704A1 |
| Сеялка селекционная | 1979 |
|
SU1049002A1 |
| Машина для посадки растений | 1929 |
|
SU19383A1 |
| АВТОМАТИЧЕСКАЯ РАССАДОПОСАДОЧНАЯ МАШИНА | 1990 |
|
RU2032302C1 |