Известны стогообразователи, у которых стог образуется вертикально перемещающейся формообразующей камерой, связанной с основанием стогообразователя шарнирно-рычажной рамой механизма привода уплотняющего устройства, расположенного в свою очередь в формообразующей камере. Эта камера поднимается над стогом в конце процесса стогообра-зования гидравлическим подъемным устройством, управляемым датчиком высоты стога.
Датчик выполнен в виде двуплечего рычага, установленного в верхней части стогообразователя на пути движения формообразующей камеры. Такое расположение датчика затрудняет доступ к нему для регулировки. В то же время при таком расположении время срабатывания датчика может изменяться ввиду того, что положение формообразующей камеры в момент окончания формирования стога может быть различным, поскольку камера выполнена самоустанавливающейся.
Предлагаемый датчик выполнен в виде двух взаимодействующих между собой двуплечих рычагов, установленных на неподвижной оси рамы механизма привода уплотняющего устройства стогообразователя. Один из рычагов связан с элементами рамы указанного механизма привода, а другой - с золотником гидравлического подъемного устройства формообразующей камеры. Это позволяет повысить эксплуатационную надежность датчика.
С целью образования стогов различной, заранее заданной высоты плечи рычага, связанного с элементами рамы механизма привода, выполнены с возможностью углового перемещения и фиксации одного плеча относительно другого.
На этом же рычаге, на одном из его плеч, взаимодействующем с плечом другого рычага, имеется поворотный подпружиненный упор, обеспечивающий возврат рычага в исходное положение при обратном движении формообразующей камеры.
Для регулировки установочного положения золотника в датчике находится регулируемый упор для рычага, соединенного с золотником гидравлического подъемного устройства.
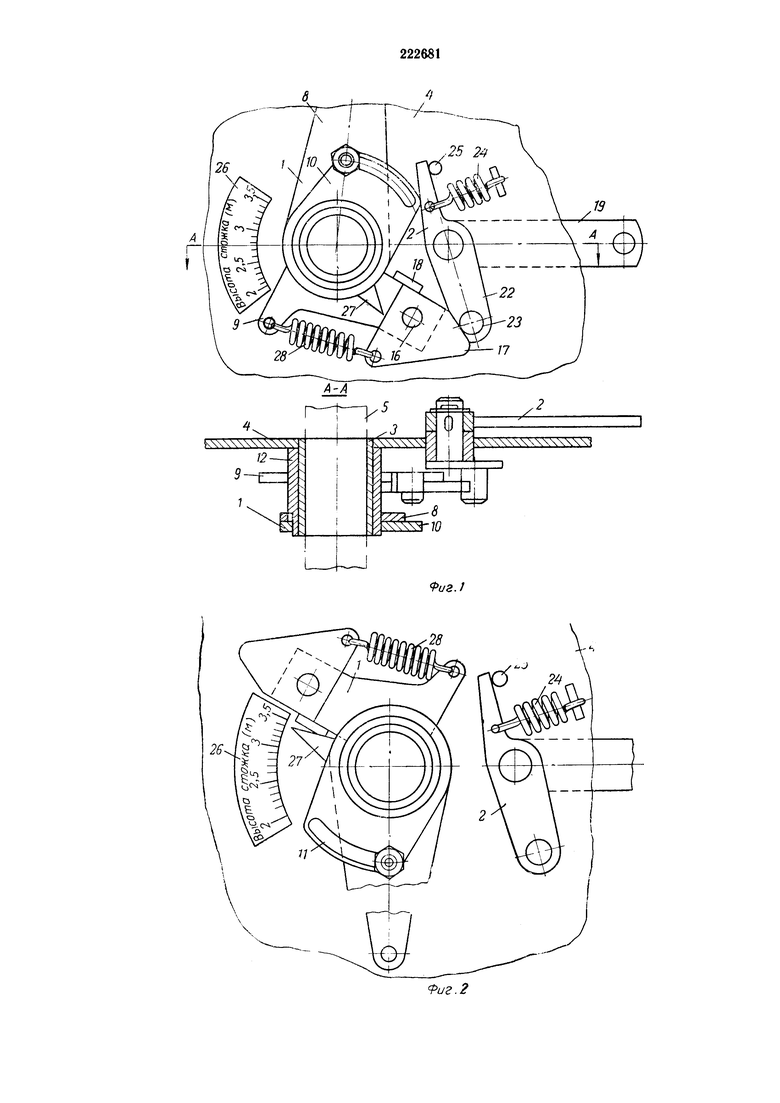
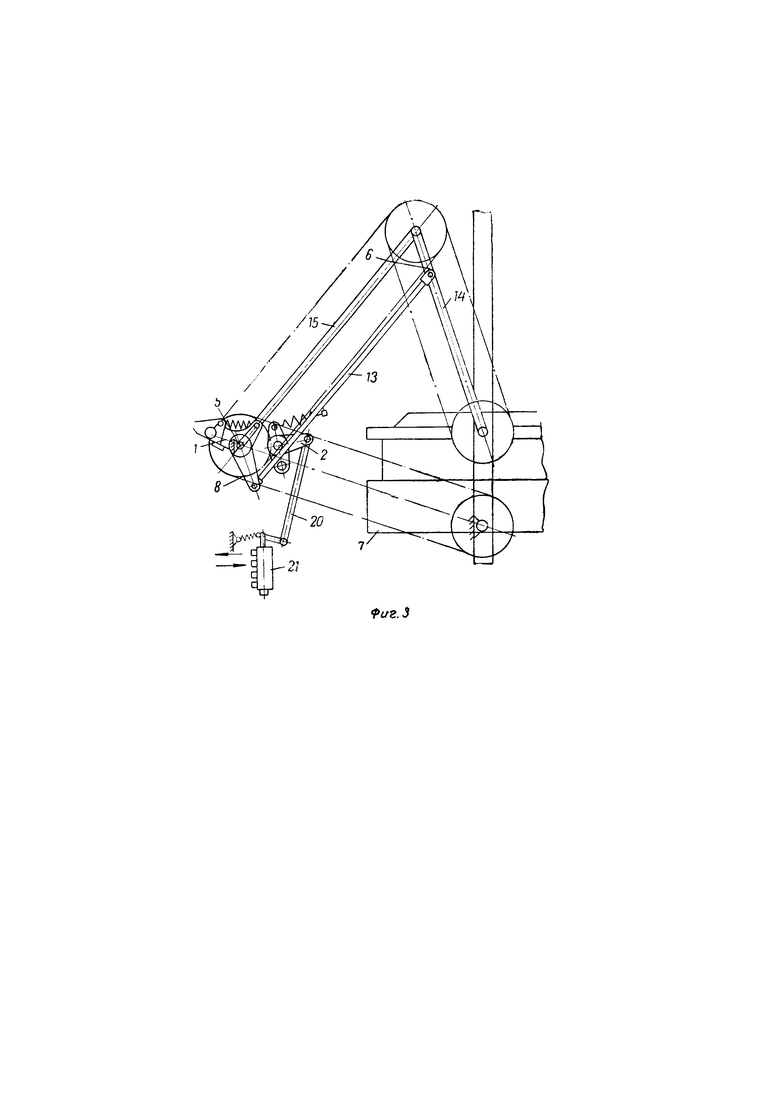
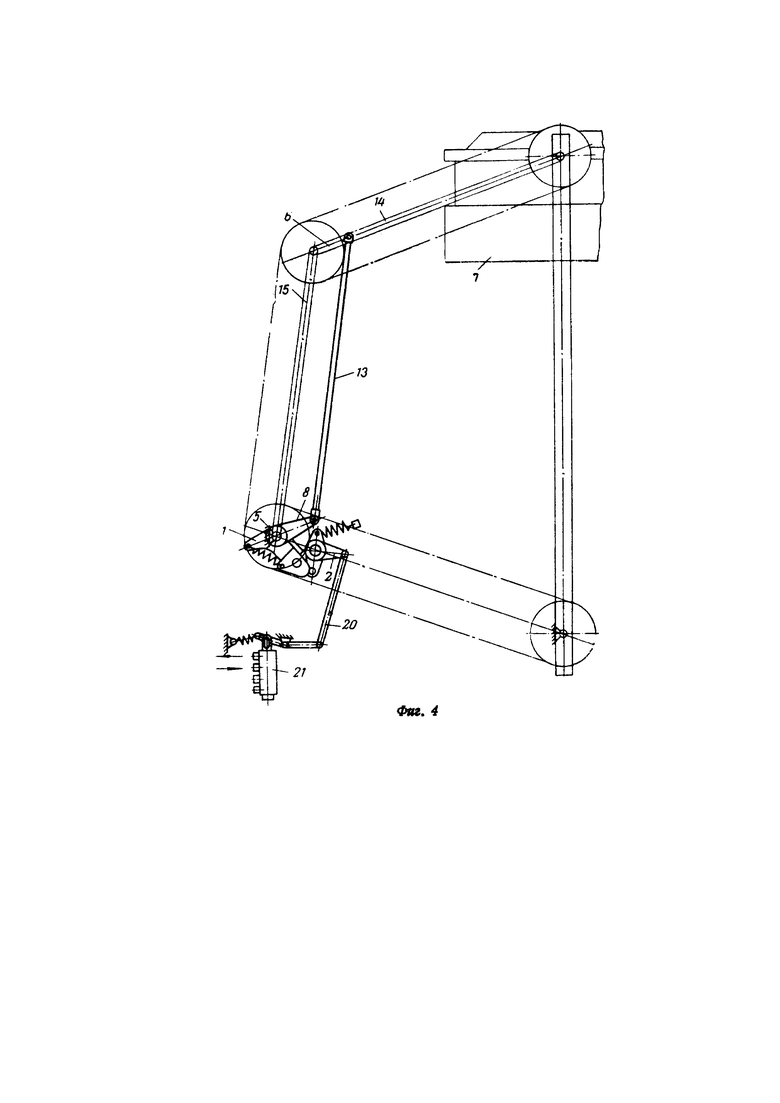
На фиг. 1 показан датчик в момент подачи сигнала на подъем формообразующей камеры; на фиг. 2 - датчик в момент начала образования стога; на фиг. 3 и 4 - датчик при различных положениях формообразующей камеры.
Датчик содержит два двуплечих рычага 1 и 2. Рычаг 1 установлен на полой оси 3 шарнирно, а рычаг 2 - на диске 4. Диск с помощью оси 3 установлен на валу 5 рамы 6 механизма привода уплотняющего устройства формообразующей камеры 7. Плечи рычага 1 выполнены в виде отдельных рычагов 8 и 9. Сектор 10 рычага 1 имеет кольцевой паз 11. На втулке 12, свободно вращающейся на оси 3, жестко закреплен рычаг 9 и поворотно - рычаг 8.
На этой же втулке жестко установлен сектор 10, с которым рычаг 8 фиксируется при помощи болта с гайкой, проходящего через кольцевой паз 11. Таким образом, рычаги 8 и сектор 10 имеют возможность перемещаться относительно друг друга.
Рычаг 8 при помощи тяги 13 соединен со штангой 14 и вместе со штангой 15 образует шарнирный четырехзвенник.
На конце рычага 9 на оси 16 установлен подпружиненный к этому рычагу упор 17, поворот которого по часовой стрелке ограничивается стопором 18.
Двуплечий рычаг 2 одним своим плечом 19 посредством тяги 20 соединен с золотником 21 гидравлического подъемного устройства. Другое плечо 22 рычага несет упор 23, контактирующий с упором 17 рычага 1. Рычаг 2 посредством пружины 24 прижимается к регулируемому упору 25, установленному на диске 4. На этом же диске установлена градуированная шкала 26, на секторе 10 - указатель 27.
Упор 25 позволяет регулировать установочное положение золотника 21 гидравлического подъемного устройства. Изменяя положение сектора 10 относительно рычага 8, можно регулировать высоту формируемого стога.
Рычаги 1 и 2 в нижнем положении формообразующей камеры 7 располагаются, как показано на фиг. 2 и 3, при этом указатель 27 установлен против одного из делений шкалы, показывая высоту, на которую отрегулирован датчик.
По мере подъема камеры 7 рычаг 1 поворачивается шарнирным четырехзвенником 6, 15, 8, 13 против часовой стрелки до тех пор, пока упор 17 не войдет в контакт с упором 23 (фиг. 1). Момент контакта упоров соответствует верхнему положению камеры 7, как показано на фиг. 1, 4.
Дальнейший подъем камеры 7 вызывает поворот рычага 2 против часовой стрелки. Рычаг 2 при помощи тяги 20 переключает золотник гидравлического подъемного устройства на ускоренный подъем формообразующей камеры. После чего камера 7 поднимается над образованным стогом для освобождения и последующей выгрузки. При этом рычаг 1, продолжая свое движение против часовой стрелки, выходит из зацепления с рычагом 2. Последний под действием пружины 24 возвращается в исходное положение.
После выгрузки стога камера 7 опускается в начальное положение, при этом рычаг 1 поворачивается по часовой стрелке и своим упором 17 входит в контакт с упором 23 рычага 2. Упор 17, преодолевая усилие пружины 28, поворачивается вокруг оси 16 против часовой стрелки до тех пор, пока не выйдет из зацепления с упором 23 рычага 2. Далее пружина 28 возвращает упор 17 в первоначальное положение, как показано на фиг. 1.
В дальнейшем этот процесс повторяется.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТОГООБРАЗОВАТЕЛЬ | 1967 |
|
SU198814A1 |
| СТОГООБРАЗОВАТЕЛЬ К УБОРОЧНЫМ СЕЛЬСКОХОЗЯЙСТВЕННЫМ МАШИНАМВСЕСОЮЗНАЯПАТШШ-иХНК^Е^НД^]БИБЛМОТГКА | 1971 |
|
SU304907A1 |
| МЕХАНИЗМ ПЕРЕКЛЮЧЕНИЯ ДЛЯ СИСТЕМЫ УПРАВЛЕНИЯ СТОГООБРАЗОВАТЕЛЕМ | 1972 |
|
SU333897A1 |
| СТОГООБРАЗОВАТЕЛЬ К СЕЛЬСКОХОЗЯЙСТВЕННЫММАШИНАМ | 1967 |
|
SU193810A1 |
| СТОГООБРАЗОВАТЕЛЬ | 1967 |
|
SU206220A1 |
| Стогообразователь | 1978 |
|
SU692592A1 |
| СТОГООБРАЗОВАТЕЛЬ К СЕЛЬСКОХОЗЯЙСТВЕННЫМ УБОРОЧНЫМ МАШИНАМ | 1970 |
|
SU266425A1 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ ФОРМООБРАЗУЮЩИМИ УСТРОЙСТВАМИ УБОРОЧНЫХМАШИН | 1968 |
|
SU211187A1 |
| СТОГООБРАЗОВАТЕЛЬ К УБОРОЧНЫМ СЕЛЬСКОХОЗЯЙСТВЕННЫМ МАШИНАМ | 1971 |
|
SU292645A1 |
| Стогообразователь | 1980 |
|
SU934984A2 |
1 Датчик высоты стога для стогообразователя с вертикально перемещающейся формообразующей камерой, связанной с основанием стогообразователя шарнирно-рычажной рамой механизма привода уплотняющего устройства, расположенного в формообразующей камере, отличающийся тем, что, с целью повышения эксплуатационной надежности, он выполнен в виде двух взаимодействующих между собой двуплечих рычагов, установленных на неподвижной оси рамы механизма привода уплотняющего устройства, и один из которых связан с элементами рамы указанного механизма привода и образует с ними шарнирный четырехзвенный механизм, а другой - с золотником гидравлического подъемного устройства формообразующей камеры.
2. Датчик по п. 1, отличающийся тем, что, с целью образования стогов различной, заранее заданной высоты, плечи рычага, связанного с элементами рамы механизма привода, выполнены с возможностью углового перемещения одного относительно другого.
3. Датчик по пп. 1 и 2, отличающийся тем, что, с целью обеспечения углового перемещения одного плеча относительно другого, одно плечо имеет кольцевой паз, а другое - фиксирующее устройство, расположенное в этом пазу.
4. Датчик по п. 1, отличающийся тем, что, с целью возврата двуплечего рычага, соединенного с элементами рамы механизма привода, в исходное положение при обратном движении формообразующей камеры, на его плече имеется поворотный упор, подпружиненный в направлении, обратном его повороту.
5. Датчик по п. 1, отличающийся тем, что, с целью осуществления регулировки установочного положения золотника, имеется регулируемый упор для рычага, соединенного с золотником гидравлического подъемного устройства.
