Данное изобретение относится к области автоматизации управления электроподвижного состава постоянного тока.
Известны устройства для автоматического регулирования электрического торможения электроподвижного состава постоянного тока с тяговыми двигателями независимого возбуждения, содержащие датчики контактной сети и решающее устройство, в которых осуществляется автоматическое регулирование тормозной силы по всем ее ограничениям при реостатном и рекуперативном торможениях.
Однако эти устройства имеют малый диапазон изменения скорости в рекуперативном режиме торможения, поскольку не используют переключение тяговых двигателей с одного соединения на другое или же осуществляют это переключение неавтоматическим путем.
Предлагаемое устройство обеспечивает автоматическое регулирование торможения в большом диапазоне скорости.
Достигается это благодаря применению блока переключения соединения тяговых двигателей, выполненного на магнитных усилителях, обмотки управления которых соединены через решающее устройство с датчиками тока якоря, тока возбуждения и напряжения контактной сети, а его выходные обмотки соединены с групповым переключателем. Одновременно автоматический сигнал регулирования воздействует на систему возбуждения независимой обмотки возбуждения возбудителя тяговых двигателей.
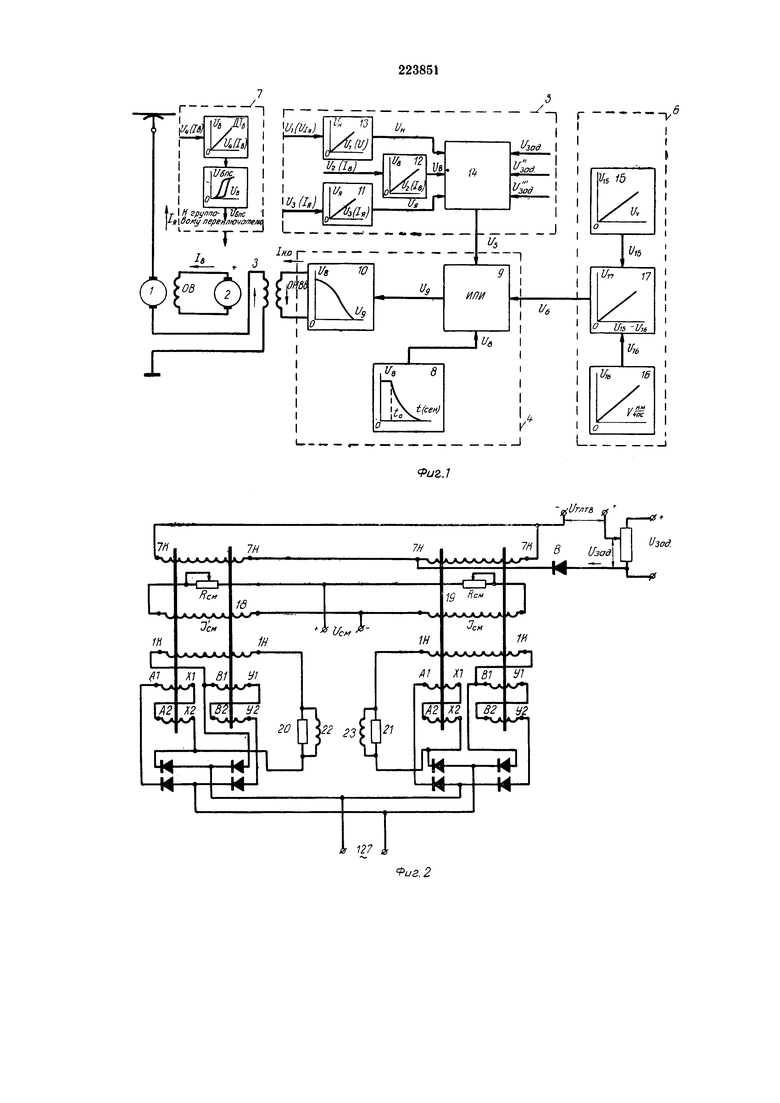
На фиг. 1 приведена упрощенная блок-схема системы автоматического управления рекуперативным торможением; на фиг. 2 - блок переключения соединений тяговых двигателей, выполненный на магнитных усилителях.
Устройство содержит следующие элементы: якорь 1 и возбудитель 2 тягового двигателя, обмотка 3 противовозбуждения возбудителя; блок 4 регулирования возбуждения; блок 5 ограничения параметров; блок 6 стабилизации скорости; блок 7 переключения соединений.
Включение торможения осуществляется ручной подачей машинистом команды на элемент включения 8, после чего весь процесс электрического торможения протекает автоматически. Характеристика элемента 8 подобрана так, что сигнал выхода U8 уменьшается в зависимости от времени. Машинистом может быть задано два режима торможения - «уменьшение скорости» и «стабилизация скорости». Сигналы выхода блоков 8, 6, 5 соответственно U8, U6, U5 подаются в логическое устройство 9 типа «ИЛИ», пропускающее только максимальный сигнал управления U9 в систему возбуждения 10. За счет сигнала U8 обеспечивается плавный рост во времени тока возбуждения возбудителя Iвв, тока возбуждения Iв и тормозного тока Iя. Блок 10 может быть выполнен на базе магнитных усилителей или тиристоров и обеспечивает плавное изменение тока Iвв в обмотке независимого возбуждения в зависимости от сигнала U9. Характеристика блока 10 такова, что при минимальном значении U9 на выходе его ток возбуждения максимален, и наоборот.
Блок 5 ограничения параметров включает в себя датчики тока якоря - 11, тока возбуждения - 12, напряжения на коллекторе тягового двигателя - 13 и решающее устройство 14, в котором производится делительно-множительные операции с сигналами, получаемыми с датчиков, и сравнение с аналогичными программными сигналами, 

 выбранными из условия обеспечения ограничения величин тока якоря, тока возбуждения и напряжения тягового двигателя. Сигнал управления U5 через блок 9 «ИЛИ» воздействует на блок 10 таким образом, что изменение тормозного усилия проходит по ограничивающим характеристикам.
выбранными из условия обеспечения ограничения величин тока якоря, тока возбуждения и напряжения тягового двигателя. Сигнал управления U5 через блок 9 «ИЛИ» воздействует на блок 10 таким образом, что изменение тормозного усилия проходит по ограничивающим характеристикам.
Блок 6 стабилизации скорости состоит из блока 15 заданной скорости и датчика 16 скорости. На выходе блока 15 поддерживается напряжение U15, пропорциональное скорости, которую задает машинист в режиме «стабилизация скорости». Это напряжение в блоке 17 сравнения сравнивается с напряжением U16, пропорциональным фактической скорости, которое берется с выхода датчика 16 и на выходе блока 6 появляется сигнал, воздействующий на блок 10 через блок 9 «ИЛИ», При этом величина тормозной силы устанавливается такой, что скорость движения поддерживается равной заданной (когда U15 становится равным U16). Если же величина уклона такова, что максимальная тормозная сила электрического тормоза будет недостаточна для поддержания установленной скорости, то устройство включает электропнематические тормоза.
Переключение тяговых двигателей в различные соединения (последовательное, последовательно-параллельное, параллельное) обеспечивается блоком переключения соединений (см. фиг. 2). Блок 7 переключения соединений выполнен с использованием магнитных усилителей, соединенных по схеме с самонасыщением и работающих в релейном режиме. За счет тока смещения 
 в обмотках управления 18, 19 ток в нагрузках 20, 21 равен нулю и промежуточные реле 22, 23, обеспечивающие питание вентилей группового переключателя, находятся в выключенном положении. Характеристики магнитных усилителей подобраны так, что переключение тяговых электродвигателей с применением системы автоматики осуществляется током управления при достижении максимальной величины тока возбуждения Iв (макс.) в такой последовательности: после получения сигнала от блока 7 переключения соединений схема переключается с рекуперативного на реостатное торможение сперва путем подключения к тяговым двигателям тормозного сопротивления, а затем за счет отключения двигателей от контактной сети;
в обмотках управления 18, 19 ток в нагрузках 20, 21 равен нулю и промежуточные реле 22, 23, обеспечивающие питание вентилей группового переключателя, находятся в выключенном положении. Характеристики магнитных усилителей подобраны так, что переключение тяговых электродвигателей с применением системы автоматики осуществляется током управления при достижении максимальной величины тока возбуждения Iв (макс.) в такой последовательности: после получения сигнала от блока 7 переключения соединений схема переключается с рекуперативного на реостатное торможение сперва путем подключения к тяговым двигателям тормозного сопротивления, а затем за счет отключения двигателей от контактной сети;
э.д.с. тяговых электродвигателей снижается на такую величину, чтобы после переключения обмоток якорей напряжение на них было примерно равно напряжению в контактной сети.
Обмотки якорей тяговых электродвигателей переключаются с параллельного на последовательно-параллельное соединение с использованием существующего группового переключения. При этом якоря части электродвигателей вначале отключаются, а затем подключаются параллельно к имеющемуся переходному сопротивлению. Для ограничения величины тока последовательно с обмотками якорей включается дополнительное переходное сопротивление (на чертеже не показаны).
На последней стадии поворота вала группового переключателя цепь переходного сопротивления размыкается и якоря тяговых электродвигателей включаются последовательно с дополнительным переходным и тормозным сопротивлениями. Поскольку в этом положении напряжение на тяговых электродвигателях примерно равно напряжению в контактной сети, они подключаются к сети, обеспечивая соединение рекуперативно-реостатного торможения.
Заключительной операцией перехода является отключение тормозных сопротивлений, после чего схема переходит в режим рекуперативного торможения.
Необходимая задержка в работе аппаратов схемы при переходах обеспечивается двумя реле времени (на чертеже не показан).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПЛАВНОГО АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯТОРМОЗНОЙ CHJlbi | 1969 |
|
SU244373A1 |
| СИСТЕМА ТОРМОЖЕНИЯ АВТОМАТИЧЕСКАЯ РЕКУПЕРАТИВНО-РЕОСТАТНАЯ | 2016 |
|
RU2646688C1 |
| УСТРОЙСТВО РЕГУЛИРОВАНИЯ СКОРОСТИ ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 2016 |
|
RU2626779C1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ТЯГОВОГО ЭЛЕКТРОДВИГАТЕЛЯ | 1972 |
|
SU422644A1 |
| УСТРОЙСТВО для ПЛАВНОГО АВТОМАТИЧЕСКОГО | 1969 |
|
SU253110A1 |
| ТЯГОВЫЙ ПРИВОД ЭЛЕКТРОПОЕЗДА ПОСТОЯННОГО ТОКА С ИМПУЛЬСНЫМ РЕГУЛИРОВАНИЕМ | 2008 |
|
RU2351483C1 |
| ПРИВОД ЭЛЕКТРОВОЗА | 2005 |
|
RU2292272C1 |
| ТЯГОВЫЙ ПРИВОД | 2007 |
|
RU2384424C2 |
| УСТРОЙСТВО для РЕКУПЕРАТИВНОГО ТОРМОЖЕНИЯ ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 1973 |
|
SU399408A1 |
| УСТРОЙСТВО ДЛЯ ИМПУЛЬСНОГО РЕГУЛИРОВАНИЯ ЭЛЕКТРИЧЕСКОГО ТОРМОЖЕНИЯ | 1972 |
|
SU426889A1 |
Устройство для автоматического регулирования электрического торможения электроподвижного состава постоянного тока, содержащее тяговые двигатели независимого возбуждения, систему возбуждения, датчики тока якоря, тока возбуждения, напряжения контактной сети, решающее устройство и групповой переключатель осуществляющий переключение тяговых двигателей, отличающееся тем, что, с целью повышения надежности безопасности движения и упрощения в эксплуатации, оно снабжено блоком переключения соединений тяговых двигателей, выполненным на магнитных усилителях, обмотка управления которых соединены через решающее устройство сдатчиками тока якоря, тока возбуждения и напряжения контактной сети, а его выходные обмотки соединены с групповым переключателем.
