Область техники
Предлагаемое изобретение относится к автоматическим рекуперативно-реостатным системам, предназначенным для использования в системах автоматического управления рекуперативно-реостатным торможением тяговых электро-подвижных составов постоянного тока (ТЭПС), оборудованных электромашинными возбудителями или статическими преобразователями, а также для управления энергетическими ресурсами электровозов.
Уровень техники
Из уровня техники известно устройство независимого возбуждения тяговых двигателей электропоездов постоянного тока (см. RU 88865, кл. H02K 1/00, публ. 2009 г.).
Известное устройство независимого возбуждения тяговых двигателей электропоездов постоянного тока с рекуперативно-реостатным торможением содержит две группы тяговых двигателей, обмотки возбуждения, разбитые на две группы, и контакторы.
Изобретательский замысел данного устройства состоит в том, что тяговые двигатели электропоезда постоянного тока в процессе торможения переключаются с последовательно-параллельного соединения на последовательное соединение, а именно, по мере уменьшения скорости вращения тяговых двигателей вследствие торможения электропоезда якоря двигателей переключаются на последовательное соединение.
Данный технический прием способен повысить эффективность рекуперативно-реостатного торможения, однако, безотказность работы такой системы сомнительна, поскольку в цепи группы якорей тяговых двигателей возможно возникновение короткого замыкания, а прием постоянного включения групп обмоток возбуждения на последовательное соединение между собой и двумя управляемыми выпрямителями посредством отключения контактора при каждом торможении электропоезда требует проведения дополнительных диагностических процедур в целях снижения степени риска отказа системы.
Из уровня техники известно устройство для регулирования скорости электроподвижного состава (см. RU 62359, кл. B60L 7/22, публ. 2007 г.).
Известное устройство для регулирования скорости электроподвижного состава содержит источник питания, последовательно соединенные якорные обмотки первого и второго тяговых электродвигателей постоянного тока, последовательно соединенные обмотки возбуждения первого, второго тяговых электродвигателей постоянного тока и контактор.
Недостатком известного устройства можно считать ограниченную область применения, исключающую установку данного устройства регулировки скорости на электропоезда, на которых помимо аналогового оборудования установлено цифровое оборудование, отсутствие гибкой цифровой структуры управления, а также отсутствие достаточного запаса функциональности для будущих режимов работы данного типа оборудования.
Наиболее близким аналогом предлагаемого изобретения является реостатно-рекуперативная система торможения электроподвижного состава (см. RU 2268172, кл. B60L 7/22, публ. 2006 г.).
Известная реостатно-рекуперативная система торможения содержит источник питания, два тяговых электродвигателя постоянного тока, резистор рекуперации, диод и два контактора.
Недостатком известной системы торможения является невозможность ее корректного использования совместно с аналоговым оборудованием систем управления торможением электропоездов, недостаточный диапазон скоростей для реализации режима электрического торможения, а также невозможность одновременной (параллельной обработки) получаемых информационных сигналов и преобразование их в управляющие сигналы, в связи с чем, у данной системы торможения весьма низкий уровень функциональных возможностей.
Раскрытие изобретения
Технической задачей (проблемой) предлагаемого изобретения является создание унифицированной системы торможения автоматической рекуперативно-реостатной тяговых электро-подвижных составов постоянного тока, имеющей высокотехнологичную цифровую структуру управления, а также достаточный запас функциональности, обеспечивающий возможность совместной работы с любыми современными системами, в том числе и с будущими постоянно совершенствующимися, осуществляющими режим работы, свойственный данному типу оборудования.
Техническим результатом предлагаемого изобретения, который объективно проявляется в ходе его использования, является повышение точности обрабатываемых информационных сигналов, улучшение выходных данных и сигналов управления, возможность работы электрического тормоза во всем диапазоне скоростей движения тягового электро-подвижного состава постоянного тока (вплоть до полной остановки), что повышает безопасность движения железнодорожных перевозок.
Указанный технический результат достигается благодаря тому, что система торможения автоматическая рекуперативно-реостатная содержит источник питания, два или более тяговых электродвигателя постоянного тока, взаимодействующие с блоком диодов, предназначенным для перехода в режим рекуперативного торможения и с блоком резисторов, подключающимся в режиме реостатного торможения, и программируемую логическую интегральную схему (ПЛИС), параллельно принимающую и обрабатывающую, проходящие через аналого-цифровые преобразователи сигналы от датчиков, контролирующих значение уровня тока, протекающего в обмотке возбуждения и в обмотке якоря тяговых электродвигателей постоянного тока и от датчика ЭДС и цифровые сигналы, поступающие от системы управления электровозом, проходящие через входной фильтр, устраняющий помехи в цепях управления, а также формирующую выходные управляющие цифровые сигналы, поступающие в преобразователь управления обмотками возбуждения тяговых электродвигателей постоянного тока, в модуль протокольного обмена информацией с подключаемыми устройствами и в цифро-аналоговые преобразователи для взаимодействия с аналоговыми системами.
По одному из частных вариантов исполнения изобретения сформированный в программируемой логической интегральной схеме (ПЛИС) выходной сигнал перед поступлением в преобразователь управления обмотками возбуждения тяговых электродвигателей постоянного тока, поступает в формирователь ШИМ.
По одному из предпочтительных вариантов исполнения изобретения сформированный в программируемой логической интегральной схеме (ПЛИС) выходной сигнал поступает в блок управления дополнительными функциями.
Предлагаемая автоматическая рекуперативно-реостатная система торможения предназначена для использования в системе автоматического управления рекуперативно-реостатным торможением тяговых электро-подвижных составов постоянного тока (ТЭПС), оборудованных электромашинными возбудителями или статическими преобразователями.
Кроме того, предлагаемая автоматическая рекуперативно-реостатная система торможения предназначена для управления энергетическими ресурсами тяговых электроподвижных составов постоянного тока (ТЭПС).
Предлагаемая автоматическая рекуперативно-реостатная система способна заменить устаревшее оборудование, а также имеет возможность установки на тяговые электроподвижные составы постоянного тока (ТЭПС), не оборудованные системами рекуперативного и/или реостатного торможения.
Предлагаемая автоматическая рекуперативно-реостатная система превосходит все характеристики оборудования предыдущего поколения и имеет в своем составе высокотехнологичную цифровую структуру управления с достаточным потенциалом функциональности для создающихся режимов работы данного типа оборудования.
Основной функциональной особенностью данной системы является возможность реализации узлов в параллельной (одновременной) цифровой приемке и обработки поступающих информационных сигналов в программируемую логическую интегральную схему (ПЛИС).
Программируемая логическая интегральная схема (ПЛИС), являющаяся частью системы торможения, имеет возможность параллельно принимать и обрабатывать сигналы от датчиков, контролирующих значение уровня тока, и от датчика напряжения, а также цифровые сигналы, поступающие от системы управления электровозом.
Помимо этого, программируемая логическая интегральная схема (ПЛИС) одновременно формирует выходные управляющие цифровые сигналы, которые поступают в преобразователь управления обмотками возбуждения тяговых электродвигателей постоянного тока, в модуль протокольного обмена информацией с подключаемыми устройствами, в цифро-аналоговые преобразователи для взаимодействия с аналоговыми системами, а также в блок управления дополнительными функциями.
В следствии того, что в системах управления рекуперативно-реостатным торможением основной тип входящей и выходящей информации представлен в аналоговом виде, в предлагаемой системе используются многоканальные аналого-цифровые и цифро-аналоговые преобразователи сигналов, что обеспечивает возможность работы с любыми системами.
Краткое описание чертежей
На фиг. 1 приведена блок-схема системы торможения автоматической реостатно-рекуперативной.
Осуществление изобретения
На фиг. 1 обозначены следующие основные узлы и элементы предлагаемой системы торможения автоматической реостатно-рекуперативной:
1 - первый тяговый электродвигатель электровоза (ТЭД);
2 - второй тяговый электродвигатель электровоза (ТЭД);
3 - программируемая логическая интегральная схема (ПЛИС);
4 - аналого-цифровые преобразователи (АЦП) (Данные узлы преобразовывают входящие аналоговые сигналы в цифровой формат);
5 - блок ввода команд, поступающих от системы управления электровозом;
6 - источник питания (Обеспечивает систему необходимыми напряжениями питания);
7 - входные фильтры (Устраняют помехи в цепях управления);
8 - цифро-аналоговые преобразователи (ЦАП) (Преобразуют цифровые сигналы в аналоговые для обеспечения согласования сигналов с системами предыдущего поколения с целью унификации подключения на электровозе);
9 - формирователь ШИМ сигнала для управления преобразователем в случае применения электромеханического преобразователя (Статические преобразователи управляются по заданному протоколу);
10 - преобразователь (Управление обмотками возбуждения ТЭД);
11 - датчик тока возбуждения ТЭД (Осуществляется контроль за значением уровня тока, протекающего в обмотке возбуждения ТЭД);
12 - датчик тока якоря ТЭД (Осуществляется контроль за значением уровня тока, протекающего в обмотке якоря ТЭД);
13 - блок диодов (Для плавного перехода в режим электрического тормоза - в режим реостатно-рекуперативного торможения);
14 - датчик ЭДС (напряжение на двигателях) в режиме электрического тормоза;
15 - блок резисторов (БР) (Подключается в режиме реостатного торможения для увеличения эффективности торможения, что значительно уменьшает тормозной путь электровоза);
16 - контактор включения блока резисторов (БР);
17 - блок управления дополнительными функциями БУДФ (Обеспечивает включение дополнительных исполнительных элементов - реле, контакторы и т.д.);
18 - модуль обмена информацией (БОИ) (Обеспечивает обмен информацией по заданным протоколам с другими устройствами - модули памяти, передача данных и т.д.).
Система торможения автоматическая рекуперативно-реостатная содержит источник питания 6, два тяговых или более электродвигателя постоянного тока 1 и 2, взаимодействующие с блоком диодов 13, предназначенным для перехода в режим рекуперативно-реостатного торможения и с блоком резисторов 15, подключающимся в режиме реостатного торможения, и программируемую логическую интегральную схему (ПЛИС) 3.
Программируемая логическая интегральная схема (ПЛИС) 3 параллельно (одновременно) принимает и обрабатывает проходящие через аналого-цифровые преобразователи 4 сигналы от датчиков, контролирующих значение уровня тока, протекающего в обмотке возбуждения 11 и в обмотке якоря 12 тяговых электродвигателей постоянного тока 1 и 2 и от датчика ЭДС 14, срабатывающего в режиме рекуперативно-реостатного торможения, и цифровые сигналы, поступающие от системы управления электровозом 5, проходящие через входной фильтр 7, устраняющий помехи в цепях управления.
Помимо этого, программируемая логическая интегральная схема (ПЛИС) 3 одновременно формирует выходные управляющие сигналы, поступающие в преобразователь 10 управления обмотками возбуждения тяговых электродвигателей постоянного тока, в модуль протокольного обмена информацией 18 с подключаемыми устройствами, в цифро-аналоговые преобразователи 8 для взаимодействия с аналоговыми системами, а также в блок управления дополнительными функциями 17.
Предлагаемая система торможения автоматическая рекуперативно-реостатная работает следующим образом.
Основное назначение системы заключается в возможности параллельной (одновременной) цифровой приемки и обработки сигналов посредством программируемой логической интегральной схемы 3 (ПЛИС).
На входы программируемой логической интегральной схемы 3 (ПЛИС) поступают сигналы, поступающие от системы управления электровозом 5, а также с датчика тока возбуждения 11, с датчика тока якоря 12 и с датчика ЭДС 14.
От системы управления электровозом 5 поступают следующие дискретные сигналы:
- вид соединения тяговых двигателей электровоза 1 и 2;
- вид режима работы;
- уровень задатчика тормозного усилия (допускается аналоговый или цифровой формат сигнала);
- сигнал включения аварийного реостатного торможения;
- сигнал проверки системы в составе электровоза.
Все сигналы, поступающие из системы управления электровозом 5, проходят через входной фильтр 7, который устраняет помехи в цепях управления.
С датчика тока возбуждения 11 и с датчика тока якоря 12 поступают сигналы о силе тока в цепи обмотки возбуждения тяговых двигателей 1 и 2 электровоза и в цепи якоря тяговых двигателей 1 и 2 электровоза. С датчика напряжения 14 поступает сигнал уровня ЭДС тяговых двигателей 1 и 2 электровоза.
Сигналы с датчика тока возбуждения 11, с датчика тока якоря 12 и с датчика ЭДС 14 обрабатываются в аналогово-цифровом преобразователе 4 (АЦП) только при необходимости, поскольку система торможения может обрабатывать поступающие в программируемую логическую интегральную схему 3 (ПЛИС) сигналы как в цифровом, так и в аналоговом формате и поступают на нее по заданному алгоритму, который обеспечивает нормальный режим работы электровоза в режиме реостатно-рекуперативного торможения с соблюдением всех необходимых ограничений, таких как значения параметров токов и напряжений, скорости нарастания сигналов, амплитуды сигналов и т.д.
Поступающие в программируемую логическую интегральную схему 3 (ПЛИС) сигналы от системы управления электровозом 5, сигналы с датчика тока возбуждения 11, с датчика тока якоря 12 и с датчика ЭДС 14 - обрабатываются и система вырабатывает соответствующие сигналы для управления работой всех преобразователей.
Формирователь ШИМ сигнала 9 управляет преобразователем 10 в случае использования электромеханического преобразователя 10, а статический преобразователь 10 управляется по заданному протоколу. При этом возможны следующие варианты протокола:
- цифровой код (интерфейс);
- линейное изменение выходного напряжения;
- частотное управление.
Одновременно вырабатываются команды для поступления в блок управления дополнительными функциями 17, такими как включение промежуточных реле электровоза, обеспечивающих импульсную подсыпку песка под колесные пары.
Блок обмена информацией 18 (БОИ) обеспечивает обмен данными для следующих функций:
- корректировка выходных сигналов в зависимости от диаметра бандажей колесных пар;
- запись данных датчика тока возбуждения 11, датчика тока якоря 12 и датчика ЭДС 14 в реальном времени и сохранение этих данных в энергонезависимой памяти;
- передача данных контроля удаленному пользователю.
Для обеспечения возможности взаимодействия с системами предыдущего поколения, установленные на электровозе, вырабатываются все необходимые аналоговые сигналы с помощью цифро-аналоговых преобразователей 8 (ЦАП), что позволит при необходимости, совместно использовать разные системы в разных секциях электровоза постоянного тока.
При снижении тормозного усилия вырабатывается сигнал для подключения блока резисторов 15, что обеспечивает восстановление необходимого тормозного усилия. Блок резисторов 15 подключается при помощи контактора 16.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ТОРМОЖЕНИЯ АВТОМАТИЧЕСКАЯ РЕОСТАТНАЯ И СПОСОБ ЕЕ РАБОТЫ | 2023 |
|
RU2818593C1 |
| СПОСОБ ВЫРАВНИВАНИЯ НАГРУЗКИ ТЯГОВЫХ ДВИГАТЕЛЕЙ ЭЛЕКТРОВОЗА ПЕРЕМЕННОГО ТОКА | 2018 |
|
RU2724981C2 |
| МИКРОПРОЦЕССОРНАЯ СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОВОЗОМ | 2010 |
|
RU2454336C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ | 2001 |
|
RU2208528C1 |
| СИЛОВАЯ ВЫПРЯМИТЕЛЬНАЯ УСТАНОВКА ВОЗБУЖДЕНИЯ ОДНОФАЗНОГО ПЕРЕМЕННОГО ТОКА ДЛЯ ЭЛЕКТРИЧЕСКОГО ТРАНСПОРТА И СПОСОБ ЕЁ УПРАВЛЕНИЯ | 2018 |
|
RU2735290C2 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОВОЗОМ ОДНОФАЗНО-ПОСТОЯННОГО ТОКА С ТРАНЗИСТОРНЫМ ПРЕОБРАЗОВАТЕЛЕМ ВОЗБУЖДЕНИЯ | 2023 |
|
RU2824412C1 |
| МИКРОПРОЦЕССОРНЫЙ БЛОК УПРАВЛЕНИЯ ВЫПРЯМИТЕЛЬНО-ИНВЕРТОРНЫМ ПРЕОБРАЗОВАТЕЛЕМ БУВИП(М) | 2002 |
|
RU2251785C2 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ МОМЕНТОМ ТЯГОВЫХ ДВИГАТЕЛЕЙ ПОСТОЯННОГО ТОКА НА ЭЛЕКТРОПОДВИЖНОМ СОСТАВЕ | 2007 |
|
RU2344949C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СКОРОСТИ И СИЛ ТЯГИ И ЭЛЕКТРИЧЕСКОГО ТОРМОЖЕНИЯ МНОГОСЕКЦИОННОГО ЭЛЕКТРОВОЗА | 1995 |
|
RU2099210C1 |
| СИСТЕМА СМЕШАННОГО ВОЗБУЖДЕНИЯ ТЯГОВЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ ЭЛЕКТРОВОЗА | 2008 |
|
RU2371332C1 |

Изобретение относится к электродинамическим тормозным системам для транспортных средств. Система торможения автоматическая рекуперативно-реостатная содержит источник питания, два тяговых электродвигателя постоянного тока, взаимодействующие с блоком диодов, предназначенным для перехода в режим рекуперативного торможения, и с блоком резисторов, подключающимся в режиме реостатного торможения и программируемую логическую интегральную схему (ПЛИС). ПЛИС выполнена с возможностью параллельно принимать и обрабатывать сигналы от датчиков, контролирующих значение уровня тока и от датчика напряжения, и цифровые сигналы, поступающие от системы управления электровозом. ПЛИС одновременно формирует выходные управляющие цифровые сигналы, которые поступают в преобразователь управления обмотками возбуждения тяговых электродвигателей постоянного тока, в модуль протокольного обмена информацией с подключаемыми устройствами и в цифро-аналоговые преобразователи для взаимодействия с аналоговыми системами. Технический результат изобретения заключается в повышении надежности электродинамического тормоза. 2 з.п. ф-лы, 1 ил.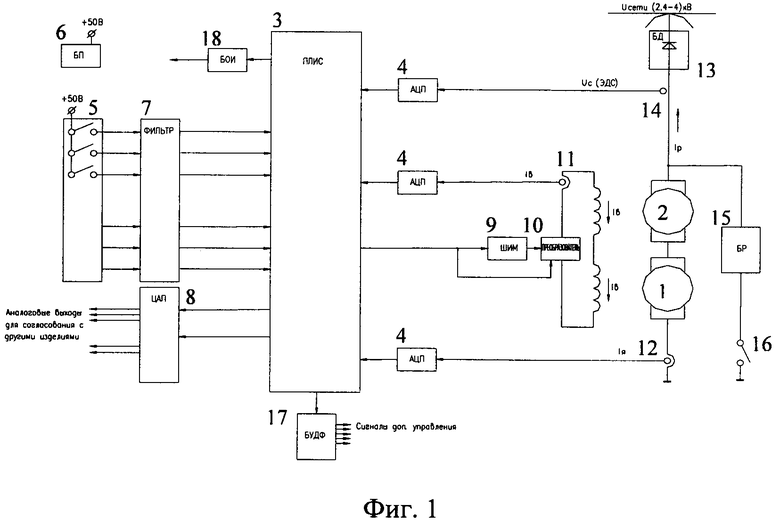
1. Система торможения автоматическая рекуперативно-реостатная, содержащая источник питания, два тяговых электродвигателя постоянного тока, взаимодействующие с блоком диодов, предназначенным для перехода в режим рекуперативного торможения и с блоком резисторов, подключающимся в режиме реостатного торможения, и программируемую логическую интегральную схему, параллельно принимающую и обрабатывающую проходящие через аналого-цифровые преобразователи сигналы от датчиков, контролирующих значение уровня тока, протекающего в обмотке возбуждения и в обмотке якоря тяговых электродвигателей постоянного тока и от датчика ЭДС, и цифровые сигналы, поступающие от системы управления электровозом, проходящие через входной фильтр, устраняющий помехи в цепях управления, а также формирующую выходные управляющие цифровые сигналы, поступающие в преобразователь управления обмотками возбуждения тяговых электродвигателей постоянного тока, в модуль протокольного обмена информацией с подключаемыми устройствами и в цифроаналоговые преобразователи для взаимодействия с аналоговыми системами.
2. Система торможения по п. 1, отличающаяся тем, что сформированный в системе управления выходной сигнал перед поступлением в преобразователь управления обмотками возбуждения тяговых электродвигателей постоянного тока поступает в формирователь ШИМ.
3. Система торможения по п. 1, отличающаяся тем, что сформированный в системе управления выходной сигнал поступает в блок управления дополнительным функционалом.
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ РЕКУПЕРАТИВНОГО ТОРМОЗА ЭЛЕКТРОВОЗА ПОСТОЯННОГО ТОКА | 2012 |
|
RU2514961C1 |
| RU 62359 U1, 10.04.2007 | |||
| 0 |
|
SU154101A1 | |
| US 4468599 A1, 28.08.1984. | |||

