Изобретение относится к навигационным приборам и может быть использовано на спутнике, вращающемся по круговой орбите или близкой к ней.
Устройства определения гравитационной вертикали известны.
Предложенное устройство отличается от известных тем, что в нем чувствительный элемент выполнен в виде двух эллипсоидов вращения, соединенных жестко при помощи оси, и установлен внутри полой сферы на жидкостном подвесе, а механизм арретирования представляет собой шаговый электродвигатель, управляющий захватами по типу ножниц.
Такое выполнение устройства позволяет повысить точность измерения.
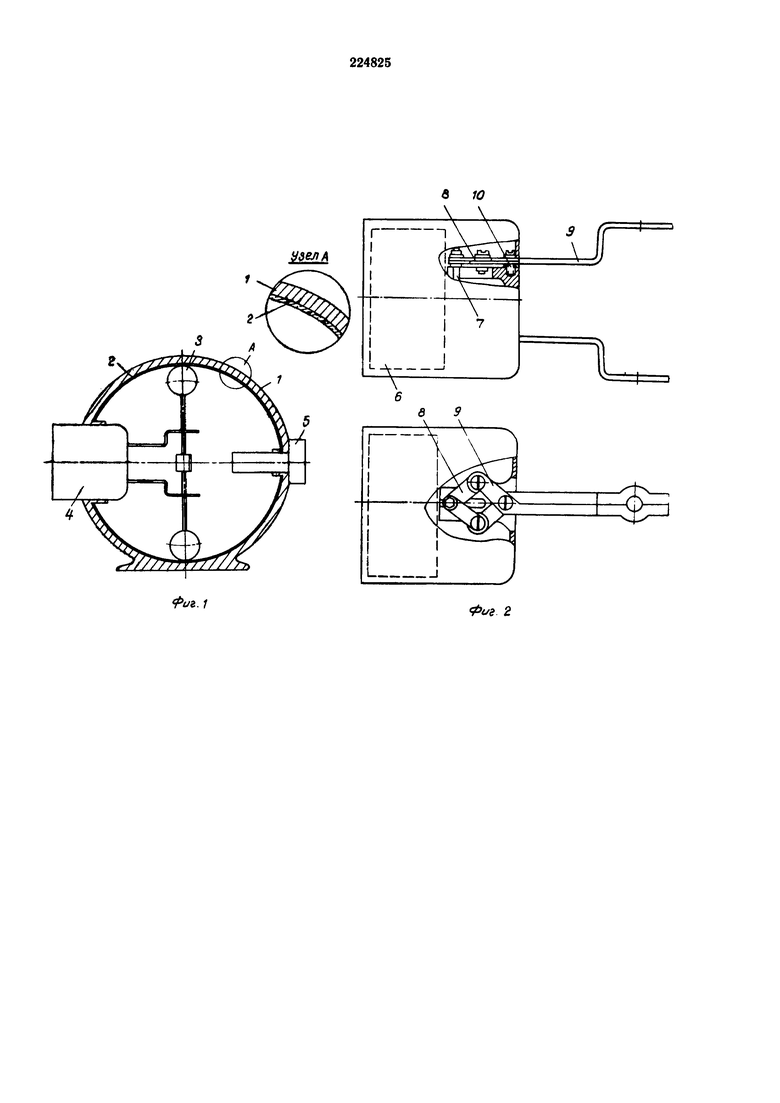
На фиг. 1 представлена схема устройства определения местной гравитационной вертикали; на фиг. 2 - схема его механизма арретирования.
В полой сфере 1 на жидкостном подвесе 2 размещен чувствительный элемент 3 и закреплен механизм 4 арретирования. На чувствительном элементе в укреплены зеркала двухкоординатных фотоэлектрических датчиков 5, расположенных во взаимно перпендикулярных плоскостях.
Устройства работает следующим образом.
С момента включения устройства на космическом объекте (в условиях невесомости) прибор разарретируют от стопорящего действия арретирующего механизма 4 и чувствительный элемент 3 устанавливается в рабочее положение, будучи подвешенным на слое жидкости подвеса 2, выстилающем внутреннюю полость сферы 1. Отклонение чувствительного элемента от исходного значения вертикали регистрируют с помощью двухкоординатных фотоэлектрических датчиков 5.
Чувствительный элемент представляет собой два сферических тела, жестко соединенных между собой осью. Наилучшей формой выполнения является эллипсоид вращения.
Арретирующий механизм (см. фиг 2) состоит из шагового электродвигателя 6, соединенного с тягами 7. Тяги 7 через звенья 8 связаны с захватами 9, укрепленными на оси 10. Захваты арретира работают по типу ножниц.
Изобретение может найти применение не только на спутниках, но и на других космических летательных аппаратах.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТНОЙ ГРАВИТАЦИОННОЙ ВЕРТИКАЛИ | 1969 |
|
SU257056A1 |
| УСТРОЙСТВО для ОПРЕДЕЛЕНИЯ МЕСТНОЙ ГРАВИТАЦИОННОЙ ВЕРТИКАЛИ | 1972 |
|
SU333518A1 |
| СПОСОБ ГАШЕНИЯ КОЛЕБАНИЙ ГРАВИТАЦИОННО-СТАБИЛИЗИРОВАННОГО СПУТНИКА | 1991 |
|
RU2034755C1 |
| Комбинированная система ориентации и навигации подвижного объекта | 2020 |
|
RU2746236C1 |
| УСТРОЙСТВО ВЫПУСКА ТРОСА СВЯЗКИ ДВУХ КОСМИЧЕСКИХ АППАРАТОВ И СИСТЕМА УПРАВЛЕНИЯ ДЛЯ НЕГО | 1999 |
|
RU2148535C1 |
| ДВУХКООРДИНАТНЫЙ СТРУННЫЙ НАКЛОНОМЕР | 2004 |
|
RU2287777C2 |
| ИНКЛИНОМЕТР | 1995 |
|
RU2131028C1 |
| УСТРОЙСТВО АРРЕТИРОВАНИЯ РОТОРА ЭЛЕКТРОДВИГАТЕЛЯ-МАХОВИКА В МАГНИТНОМ ПОДВЕСЕ | 2014 |
|
RU2574497C1 |
| СПОСОБ МАГНИТНОЙ РАЗГРУЗКИ ДВИГАТЕЛЕЙ-МАХОВИКОВ КОСМИЧЕСКОГО АППАРАТА | 2014 |
|
RU2568827C1 |
| Гравитационный вариометр | 1983 |
|
SU1115002A1 |
Устройство для определения местной гравитационной вертикали, содержащее чувствительный элемент, подвес, двухкоординатные фотоэлектрические датчики и механизм арретирования, отличающееся тем, что, с целью повышения точности измерения, в нем чувствительный элемент выполнен в виде двух эллипсоидов вращения, соединенных жестко посредством оси, и размещен внутри полой сферы на жидкостном подвесе, а механизм арретирования выполнен в виде шагового электродвигателя, управляющего, захватами по типу ножниц.
