Изобретение относится к космической технике и может быть использовано для управления ориентацией космических аппаратов (КА) при их взаимодействии с внешним магнитным полем.
В настоящее время для управления ориентацией класса малых и более легких космических аппаратов (КА) широко применяются двигатели-маховики (ДМ), которые отличают высокая точность стабилизации, малые размеры, простота управления, а также отсутствие расхода невозобновляемого рабочего тела. При этом одним из недостатков двигателей данного типа является необходимость сброса кинетического момента маховиков при достижении ими предельных скоростей вращений.
Жидкостные реактивные двигатели (РД) или электромагнитные исполнительные органы (ЭМИО) управления, жестко закрепленные на корпусе, наиболее часто применяются для решения задачи сброса кинетического момента ДМ в современной космонавтике. Современные РД относительно громоздки, что увеличивает вес и размеры КА, а также данный тип исполнительных органов требует расхода рабочего тела. ЭМИО во время работы требует постоянного расхода электроэнергии.
Также возможны и другие способы. Например, в конце XX века организацией РКК «Энергия» был запатентован «Способ магнитной разгрузки инерционных исполнительных органов космического аппарата и устройство для его осуществления» (патент на изобретение №2070148). Согласно изобретению с помощью бортовой магнитной системы (МС) КА создают магнитный момент и поворачивают МС вокруг двух взаимно перпендикулярных осей КА, создавая тем самым требуемое разгружающее моментное усилие, обусловленное взаимодействием векторов магнитной индукции магнитного поля Земли (МПЗ) и указанного магнитного момента. В качестве МС может использоваться короткозамкнутая сверхпроводящая катушка с циркулирующим в ней постоянным током, а также система постоянных магнитов (ПМ). Данный способ принят за ближайший аналог.
Способ разгрузки, описанный в патенте №2070148, требует дополнительную систему управления МС, что уменьшает надежность и простоту построения данной системы. Более того, использование постоянных магнитов в рассматриваемом изобретении приводит к необходимости постоянного управления угловым положением МС, в противном случае система станет неустойчивой, так как магнит будет постоянно стремиться совместиться с магнитными линиями внешнего магнитного поля.
Сущность предлагаемого способа заключается в том, что определяются векторы накопленного двигателями-маховиками кинетического момента и магнитной индукции МПЗ и при превышении критического уровня накопленного кинетического момента системы ДМ КА разворачивают с помощью ДМ вокруг двух взаимно перпендикулярных осей КА по сигналам системы управления таким образом, чтобы ось ДМ с меньшим накопленным кинетическим моментом совпадала с вектором магнитной индукции МПЗ, далее арретируют МС и сбрасывают кинетический момент двигателей-маховиков, лежащих в плоскости, перпендикулярной вектору магнитной индукции МПЗ, после сброса кинетического момента магнитную систему разарретируют и космический аппарат при необходимости возвращают в опорную систему координат.
Перед возвратом в опорную систему координат анализируется накопленный кинетический момент ДМ, расположенного вдоль оси, которая не подвергалась разгрузке. Если данный кинетический момент оказывается больше критического уровня, то происходит новый разворот КА с помощью ДМ вокруг двух взаимно перпендикулярных осей КА по сигналам системы управления таким образом, чтобы ось ДМ с меньшим накопленным кинетическим моментом совпадала с вектором магнитной индукции МПЗ, далее арретируют МС и сбрасывают кинетический момент двигателей-маховиков, лежащих в плоскости, перпендикулярной вектору магнитной индукции МПЗ, после сброса кинетического момента магнитную систему разарретируют и космический аппарат возвращают в опорную систему координат.
В качестве МС могут быть использованы системы на основе постоянных магнитов или электромагнитов.
Система ДМ располагается по взаимно перпендикулярным осям КА.
Сущность изобретения иллюстрируется функциональной схемой на фиг. 1 и рисунками на фиг. 2 и фиг. 3.
На фиг. 1 представлена функциональная схема работы способа магнитной разгрузки. Схема включает КА 1, систему управления 2, содержащую средства определения угловой ориентации КА 3, бортовую вычислительную машину (БВМ) 4, ДМ 6 с блоком управления 5, датчики кинетического момента ДМ 7, средства определения вектора магнитной индукции МПЗ 8, а также устройство с МС 9.
Данная схема функционирует следующим образом. Стабилизация КА 1 при воздействии возмущающих моментов осуществляется ДМ 6. Блок управления 5, используя управляющий сигнал с БВМ 4, осуществляет управление ДМ. Действие возмущающих моментов на КА приводит к изменению величины кинетического момента ДМ, которая определяется датчиками 7. При достижении системой ДМ критического уровня накопленного кинетического момента БВМ 4 принимает решении о разгрузке ДМ. Далее, используя сигналы со средств определения вектора магнитной индукции МПЗ 8 и средств определения угловой ориентации КА 3, БВМ выдает сигналы управления на блок управления 5, чтобы произошел разворот КА до совмещения оси менее насыщенного ДМ с вектором магнитной индукции МПЗ. После разворота БВМ 4 выдает сигнал на устройство с МС 9, и происходит арретирование данной МС. Далее БВМ 4 выдает такие сигналы управления на блок управления 5, что ДМ, лежащие в плоскости, перпендикулярной магнитной индукции МПЗ, начинают сбрасывать накопленный кинетический момент, при этом все ДМ демпфируют угловые скорости, возникающие вокруг соответствующих осей. После сброса кинетического момента ДМ, лежащих в плоскости, перпендикулярной вектору магнитной индукции МПЗ, БВМ 4 выдает сигнал на устройство с МС 9, и происходит разарретирование данной МС. Далее БВМ 4 принимает решение о необходимости возврата в опорную систему координат или о сбросе кинетического момента ДМ, ось которого совпадала с вектором магнитной индукции МПЗ.
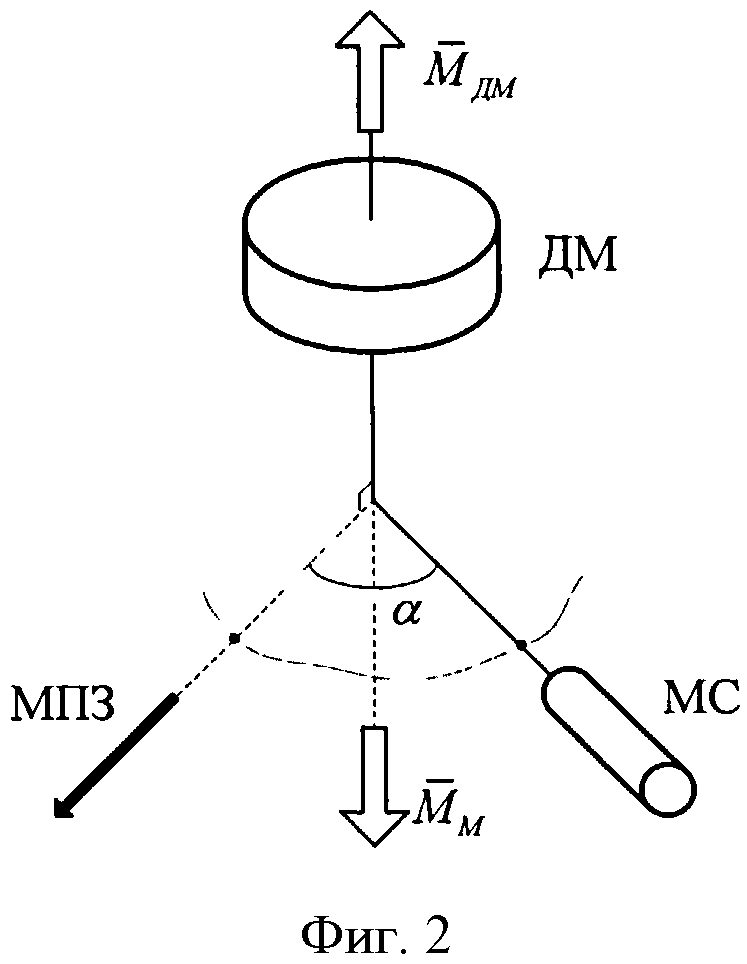
На фиг. 2 показывается принцип сброса кинетического момента одного ДМ. Если ДМ, нуждающийся в разгрузке, ориентирован в плоскости, перпендикулярной вектору МПЗ, то с помощью арретира МС связывается с корпусом КА и режим работы данного ДМ переключается в режим сброса кинетического момента. Разгрузочный момент 

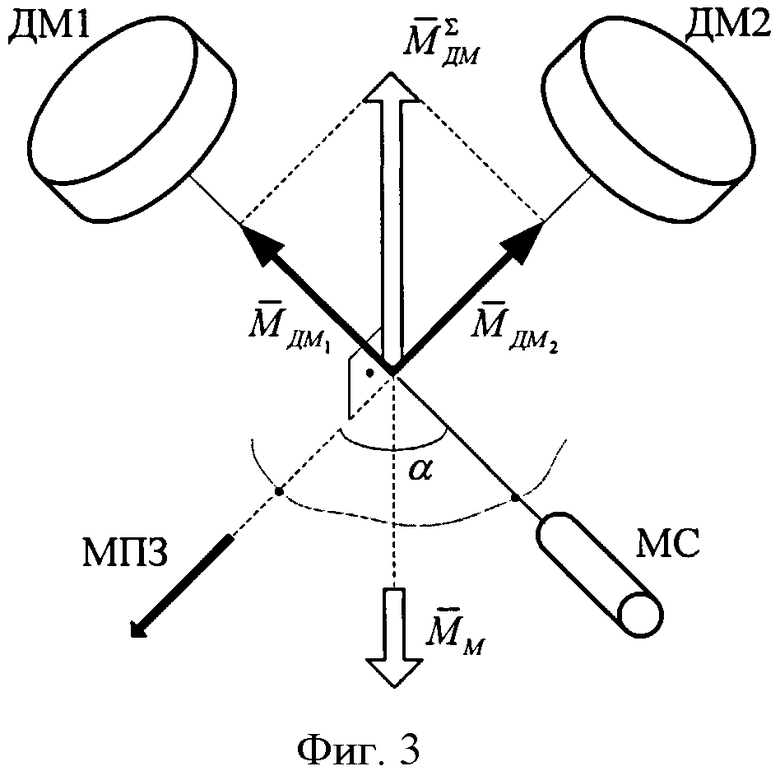
Принцип сброса кинетического момента сразу двух ДМ, показанный на фиг. 3, аналогичен. Только при этом необходимо, чтобы вектор магнитной индукции был перпендикулярен плоскости, проходящей через оси данных ДМ. В данном случае уже суммарный разгрузочный момент 
Таким образом, разворот КА с дальнейшим арретированием МС осуществляется с целью компенсации момента, возникающего при разгрузке ДМ, лежащих в плоскости, перпендикулярной вектору магнитной индукции МПЗ. Предполагается, что разворот КА происходит за счет оставшегося ресурса ДМ по кинетическому моменту. ДМ, который не разгружается, во время сброса кинетического момента остальных ДМ работает в режиме демпфирования угловых скоростей вокруг его оси. Предполагается во время разгрузки осуществлять разворот, когда в конечном положении ось менее насыщенного ДМ совмещена с вектором магнитной индукции МПЗ.
Для реализации предлагаемого способа разгрузки ДМ предполагается использование конструкции на борту КА, которая позволяла бы находиться МС в двух состояниях:
a) в свободном состоянии, когда МС и КА развязаны друг относительно друга и их взаимное влияние минимально (при этом МС ориентируется вдоль вектора магнитной индукции МПЗ, а КА, например, выполняет целевую работу, стабилизируясь в опорной системе координат с помощью системы ДМ);
b) в связанном состоянии, когда МС и КА представляют собой единую систему, и механический момент, возникающий при взаимодействии МС и МПЗ, воздействует на КА.
В качестве устройства, обеспечивающего свободное вращение МС относительно корпуса КА, можно рассматривать, например, карданов подвес. Механический момент, воздействующий на спутник при фиксации МС, и предполагается использовать для разгрузки ДМ.
В данном случае можно провести аналогию со стрелкой магнитного компаса, которая имеет одну точку подвеса, вокруг которой она может свободно вращаться, ориентируясь по магнитным силовым линиям Земли. Если добавить в компас специальный механизм, который арретировал бы стрелку относительно корпуса в любой момент времени, то получится аналогичная система с одним лишь отличием, что стрелка способна вращаться только в одной плоскости. В момент арретирования стрелки момент от ее взаимодействия с МПЗ начинает воздействовать и на корпус компаса.
В качестве примера рассмотрим магнитную разгрузку КА с массово-габаритными характеристиками, близкими к характеристикам микроспутника "Бауманец-2". В качестве МС будет рассматриваться использование постоянного неодинового магнита объемом 10-4 м3 и магнитной индукцией 1,3 Тл, что соответствует магнитному моменту порядка 100 А·м2. Сброс кинетического момента 1,5 Н·м·с системы ДМ происходит за время порядка 2000 с. Данный результат удовлетворяет условию эффективной разгрузки.
Данное изобретение применимо для КА с малыми моментами инерции, движущимся на низких околоземных орбитах. К преимуществам данного способа следует отнести простоту и надежность, так как разворот для разгрузки ДМ осуществляется собственной системой управления КА.
Изобретение относится к управлению ориентацией космических аппаратов (КА). Способ магнитной разгрузки двигателей-маховиков КА заключается в том, что при превышении критического уровня накопленного кинетического момента двигателями-маховиками (ДМ) КА разворачивают с помощью ДМ вокруг двух взаимно перпендикулярных осей КА таким образом, чтобы ось ДМ с меньшим накопленным кинетическим моментом совпадала с вектором магнитной индукции внешнего магнитного (геомагнитного) поля. Арретируют магнитную систему (МС) и момент, возникающий при взаимодействии МС и внешнего магнитного поля, используют для сброса кинетического момента ДМ, лежащих в плоскости, перпендикулярной вектору магнитной индукции внешнего магнитного поля. После сброса кинетического момента магнитную систему разарретируют и космический аппарат при необходимости возвращают в опорную систему координат, или происходит новый разворот с целью сброса кинетического момента ДМ, ось которого совпадала с вектором магнитной индукции внешнего магнитного (геомагнитного) поля. Техническим результатом изобретения является упрощение процесса и увеличение надежности магнитной разгрузки. 1 з.п. ф-лы, 3 ил.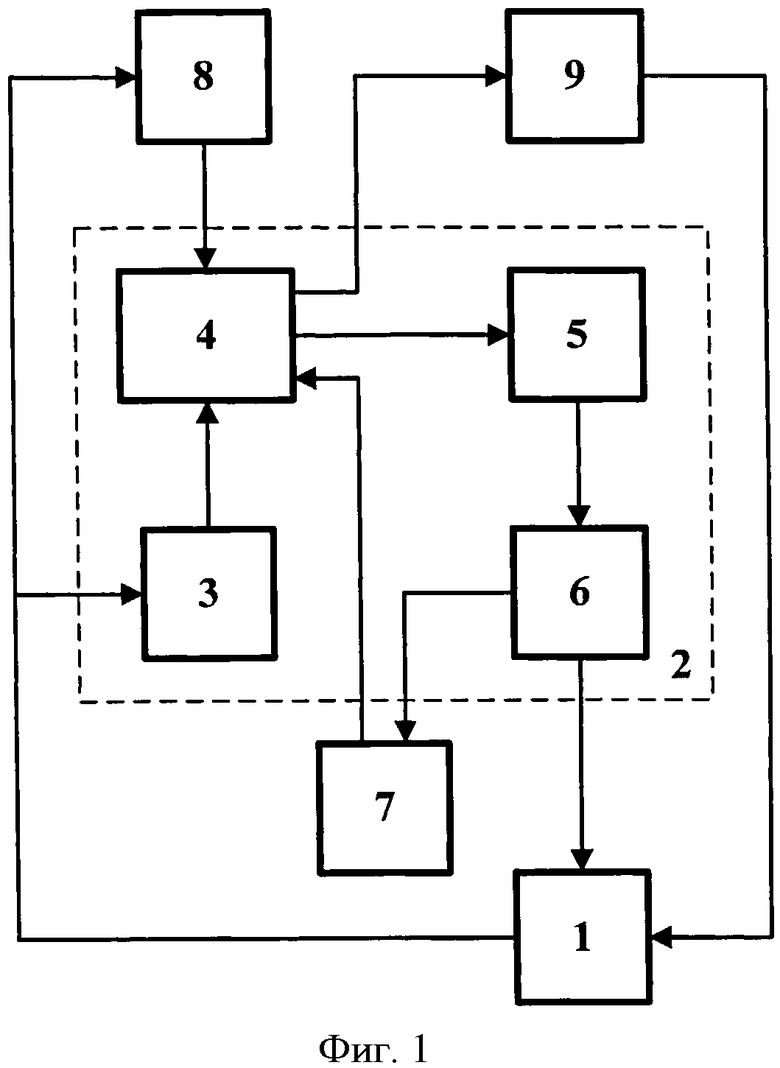
1. Способ магнитной разгрузки двигателей-маховиков космического аппарата, включающий определение векторов накопленного двигателями-маховиками кинетического момента и магнитной индукции магнитного поля Земли, отличающийся тем, что при превышении критического уровня накопленного кинетического момента двигателями-маховиками космический аппарат разворачивают с помощью двигателей-маховиков по сигналам системы управления таким образом, чтобы ось двигателя-маховика с меньшим накопленным кинетическим моментом совпадала с вектором магнитной индукции магнитного поля Земли, далее арретируют магнитную систему, построенную на основе постоянных магнитов или электромагнитов, и сбрасывают кинетический момент двигателей-маховиков, лежащих в плоскости, перпендикулярной вектору магнитной индукции магнитного поля Земли, после сброса кинетического момента магнитную систему разарретируют и космический аппарат возвращают в опорную систему координат.
2. Способ по п. 1, отличающийся тем, что перед возвратом в опорную систему координат анализируют накопленный кинетический момент двигателя-маховика, который не был подвержен разгрузке, и при превышении критического уровня космический аппарат разворачивают с помощью двигателей-маховиков по сигналам системы управления таким образом, чтобы ось двигателя-маховика с меньшим накопленным кинетическим моментом совпадала с вектором магнитной индукции магнитного поля Земли, далее арретируют магнитную систему, построенную на основе постоянных магнитов или электромагнитов, и сбрасывают кинетический момент двигателей-маховиков, лежащих в плоскости, перпендикулярной вектору магнитной индукции магнитного поля Земли, после сброса кинетического момента магнитную систему разарретируют и космический аппарат возвращают в опорную систему координат.
| Сыров А.С., Бортовые системы управления космическим аппаратом, - М.: МАИ-ПРИНТ, 2010, с | |||
| Домовый номерной фонарь, служащий одновременно для указания названия улицы и номера дома и для освещения прилежащего участка улицы | 1917 |
|
SU93A1 |
| СПОСОБ МАГНИТНОЙ РАЗГРУЗКИ ИНЕРЦИОННЫХ ИСПОЛНИТЕЛЬНЫХ ОРГАНОВ КОСМИЧЕСКОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2070148C1 |
| US 5141180 A, 25.08.1992 | |||
| Колосоуборка | 1923 |
|
SU2009A1 |

