Известны электромеханические силоизмерительные датчики, содержащие упругую грузовую балочку, хомут подвески с керновой опорой, кулисы, рычаги, регулирующие винтовые механизмы и звенья, индукционные датчики, плоские пружины, флажки, гидродемпфер и шасси.
В предложенном электромеханическом датчике подвижной конец упругой грузовой балочки жестко связан с нижним концом одной из двух плоских пружин. При этом нижний конец второй пружины неподвижно заделан в регулирующем винтовом звене на шасси, а к верхним жестко соединенным концам плоских пружин прикреплен рычаг. Рычаг связан с поплавковым гидродемпфером и двумя флажками, поочередно входящими в прорези индукционных датчиков, закрепленных на кулисах, устанавливаемых под требуемым углом регулирующими винтовыми механизмами.
Такое выполнение датчика позволяет повысить точность измерения.
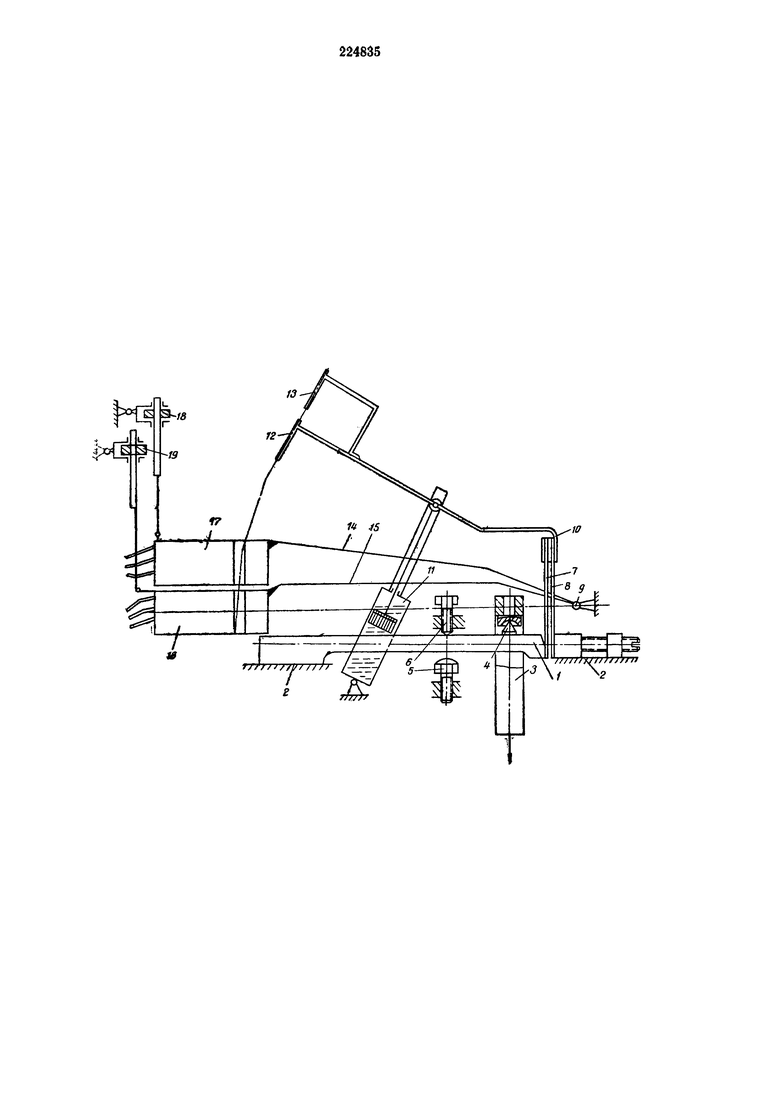
На чертеже показана принципиальная схема электромеханического силоизмерительного датчика.
Датчик состоит из упругой грузовой балочки 1, одним концом жестко закрепленной в шасси 2, на которую через хомут 3 и керновую опору 4 передается усилие от бункера (на чертеже не показан) весового дозатора.
Для ограничения деформации балочки 1 служит регулирующееся винтовое упорное звено 5, а для предварительной деформации ее - регулировочное винтовое звено 6.
На подвижном конце балочки 1 закреплена пластинчатая пружина 7. Верхний конец пружины 7 жестко связан с пластинчатой пружиной 8 такого же сечения, нижний конец которой жестко заделан в винтовом звене 9 на шасси 2. К жестко связанным концам пластинчатых пружин 7 и 8 неподвижно подсоединен рычаг 10, несущий на себе поплавковый гидродемпфер 11 с флажками 12 и 13.
На кулисах 14 и 15 жестко укреплены индукционные датчики 16 и 17, которые устанавливаются под заданным углом регулирующими винтовыми механизмами 18 и 19. Один из датчиков выдает сигнал к переводу питающего устройства (на чертеже не показан) на режим замедленной подачи продукта в бункер дозатора, а другой - к мгновенной остановке питающего устройства по достижении номинального веса продукта.
В исходном положении при порожнем бункере грузовая балачка 1 находится в деформированном состоянии под действием веса бункера дозатора. Пластинчатые пружины 7 и 8 имеют начальную кривизну, при которой флажки 12 и 13 находятся вне индукционных датчиков 16 и 17.
С увеличением нагрузки на балочку 1, вследетвии увеличения кривизны пружин 7 и 8, рычаг 10 начинает поворачиваться против часовой стрелки и один из флажков входит в прорезь индукционного датчика, отрегулированного под черновой вес дозы продукта. Датчик выдает сигнал на перевод питателя на режим работы с меньшей производительностью.
По достижении номинального веса другой флажок заходит в прорезь второго индукционного датчика, который выдает сигнал на отключение питателя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля давления воздуха в шинах | 1984 |
|
SU1259117A1 |
| ВЕСОИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО | 1973 |
|
SU390376A1 |
| РОТОРНЫЙ ДВИГАТЕЛЬ ВНЕШНЕГО И ВНУТРЕННЕГО СГОРАНИЯ | 2000 |
|
RU2202701C2 |
| Устройство для регулирования натяжения длинномерного материала | 1988 |
|
SU1646974A1 |
| Платформа с механизмом погрузки для перевозки миномета | 2024 |
|
RU2841415C1 |
| ЭКСПЕРИМЕНТАЛЬНАЯ УСТАНОВКА ДЛЯ ИССЛЕДОВАНИЯ ОХЛАЖДЕННЫХ ТЕКСТИЛЬНЫХ МАТЕРИАЛОВ | 2018 |
|
RU2694111C1 |
| СЕЛЕКТОР РЕЖИМОВ УПРАВЛЕНИЯ АВТОМАТИЧЕСКОЙ ТРАНСМИССИЕЙ АВТОМОБИЛЯ | 2013 |
|
RU2551786C1 |
| Стенд для испытания замков | 1988 |
|
SU1705720A1 |
| ВАРИАТОР | 2015 |
|
RU2604754C1 |
| Датчик ускорения с частотным выходом | 1977 |
|
SU640213A1 |
Электромеханический силоизмерительный датчик, например, для управления питателем порционного весового дозатора, содержащий упругую грузовую балочку, хомут подвески с керновой опорой, плоские пружины, кулисы, рычаги, регулирующие винтовые механизмы и звенья, индукционные датчики, флажки, гидродемпфер и шасси, отличающийся тем, что, с целью повышения точности измерения, в нем подвижной конец упругой грузовой балетки жестко связан с нижним концом одной из двух плоских пружин, при этом нижний конец второй пружины неподвижно заделан в регулирующем винтовом звене на шасси, а к верхним жестко соединенным концам плоских пружин прикреплен рычаг, связанный с поплавковым гидродемпфером и двумя флажками, поочередно входящими в прорези индукционных датчиков, закрепленных на кулисах, устанавливаемых под требуемым углом регулирующими винтовыми механизмами.
