В известных механотронах чувствительность к перемещениям связана с диапазоном измеряемых перемещений обратной зависимостью. Высокая чувствительность достигается уменьщением диапазона измеряемых перемещений и, наоборот, диапазон измеряемых перемещений расширяется при понижении чувствительности.
Целью изобретения является обеспечение широких пределов измерения при высокой чувствительности, т. е. избавление от этой обратной зависимости, создание любой передаточной функции и особенно линейной зависимости.
В большинстве известных механотронов зависимость между изменением выходного сигнала и изменением перемещения существенно нелинейна.
Предлол енный мехаиотрон поперечного управления содержит неподвижный подогревный катод, подвижную систему и неподвижное анодное устройство.
Его неподвижные электроды выполнены плоскими и параллельными друг другу, а подвижная система - в виде пластины-ширмы, частично перекрывающей площадь между неподвижными электродами.
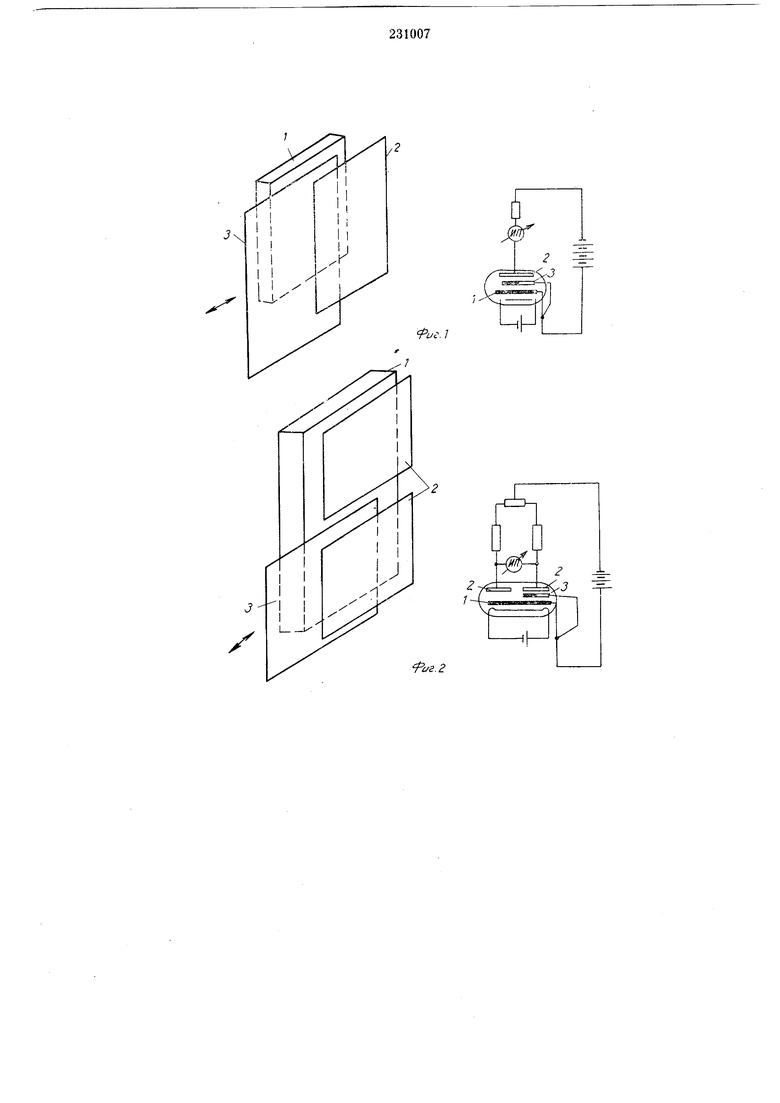
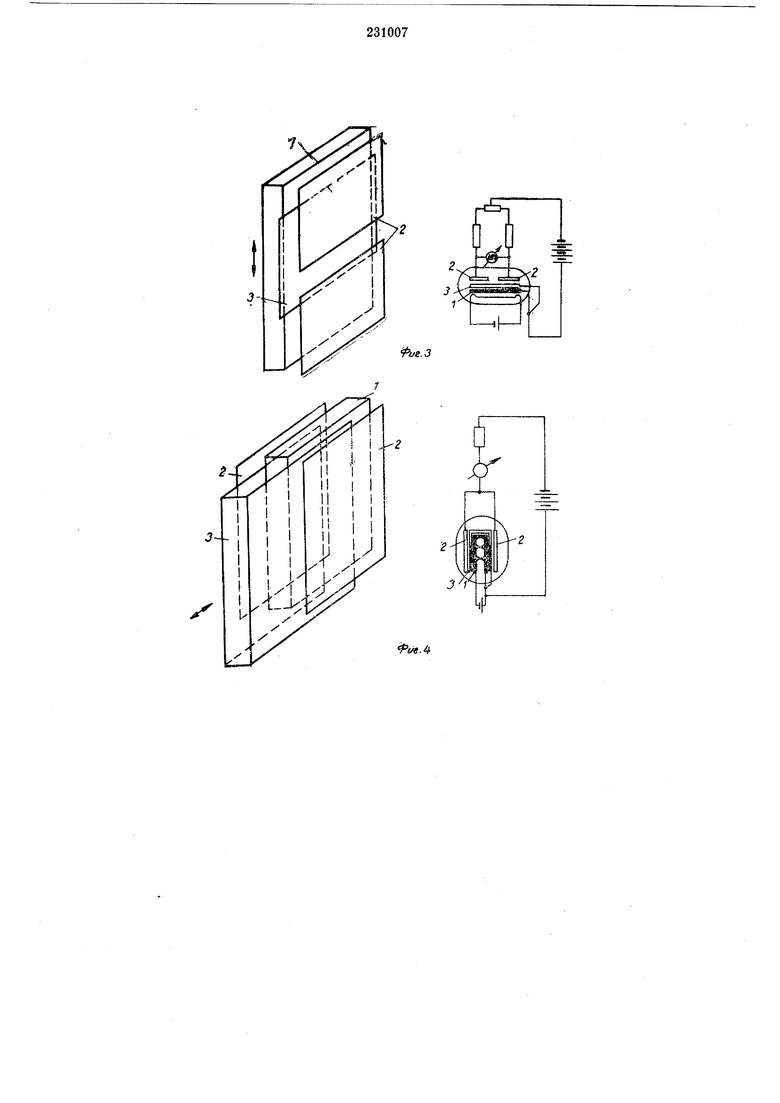
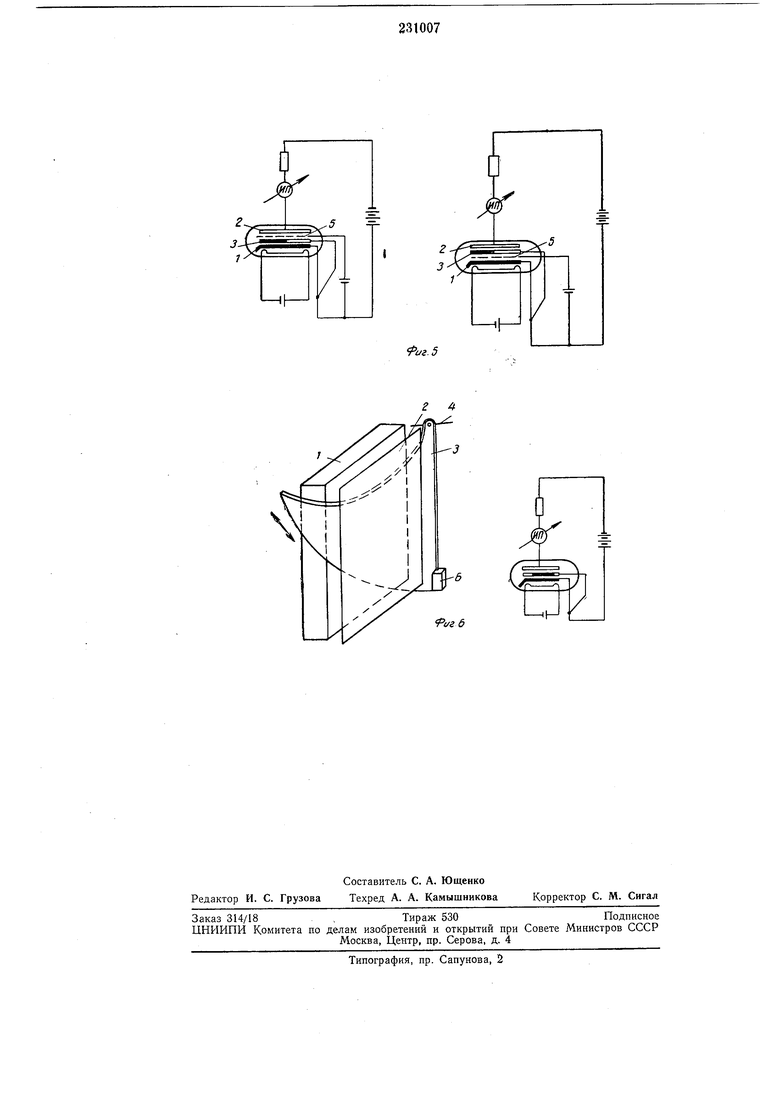
На фиг. 1 представлен механотрон, диодный вариант с одним анодом; на фиг. 2 - то же, с двумя анодами, из которых один перекрывается подвижной пластиной; на фиг. 3- с двумя анодами, перекрываемыми подвижной пластиной; на фиг. 4 - с П-образной подвижной пластиной; на фиг. 5 даны триодные варианты механотрона; на фиг. 6 - то же, с серповидной пластиной.
Механотрон поперечного управления содержт (см. фиг. 1-4) подогревный оксидный катод 1, неподвижные аноды 2 и подвижной
плоский электрод 3.
Подвижной электрод 3 может быть выполнен в виде серповидной пластины, подвешенной на упругой нити 4 (си. фиг. 6).
В процессе работы лампы подвижной электрод 3, перемещающийся поперек силовых линий электрического поля, экранирует ту или иную часть поверхности анода и катода, что, в своЕО очередь, вызывает соответствующие изменения анодного тока, фиксируемого
измерительным прибором (направление перемещения подвижного электрода на фиг. 1 обозначено стрелкой).
С целью обеспечения широких пределов измерения при высокой чувствительности механотрона, а также снижения влияния флюктуации источников питания и внутриламповых процессов (изменение эмиссии катода, изменение контактной разности потенциалов между катодом и анодом и т. д.) на выходмерительную схему анодное устройство лампы вынолнено в виде двух плоских электродов, параллельных катоду и расположенных по одну или по обе стороны от него. Плоский подвижной электрод 3 непосредственно управляет током одного из анодов, в то время, как ток второго анода остается неизменным и эталоном сравнения при определении нулевого положения в процессе работы мостовой измерительной схемы (см. фиг. 2).
Для повышения чувствительности двуханодного механотрона плоский подвижной электрод 3 расположен между анодами 2 и катодом 1 и выполнен в виде пластины, частично перекрывающей площадь двух анодов, причем разность токов фиксирует измерительный прибор, включенный в диагональ мостовой схемы (фиг. 3).
Чувствительность механотрона может быть увеличена вдвое, если подвижной электрод 5 изготовить в виде П-образной скобы, а неподвижные аноды 2 разместить по обе стороны катода / (см. фиг. 4). При этом мощность, потребляемая лампой, не повышается, так как такая конструкция базируется на одном общем катоде.
Более существенное повышение чувствительности может быть достигнуто в многокаскадном механотроне, в котором два, три, четыре и более каскадов электродных систем, выполненных в виде описанных выще конструкций, объединены в единый прибор, причем одпотипные электроды соединены между собой и выведены на общнй вывод цоколя лампы.
Электродные системы могут содержать неподвижную управляющую сетку 5 (триодный вариант), что позволяет повысить внутреннее дифференциальное сопротивление лампы и регулировать ее статический режим в более широких пределах.
В триодном варианте подвижной электрод перемещается также поперек силовых линий электрического поля в пространстве катод- сетка или в пространстве сетка - анод (см. фиг. 5). Для получения требуемой передаточной функции подвижная пластина может быть выполнена фигурной формы. Она может перемещаться как поступательно, так и вращательно.
Подвижной электрод иа фиг. 6 представляет собой отвес с нитью 4 подвеса, грузом 6 и подвижной пластиной в виде серпа, очерченного по наружной части дугой окружности, а по внутренней части - отрезком спирали Архимеда.
Предмет изобретения
1. Механотрон поперечного управления, содержащий неподвижный подогревный катод.
подвижную систему и неподвижное анодное устройство, отличающийся тем, что, с целью обеспечения щироких пределов измерения при высокой чувствительности, а также создания 5 возможности управления зависимостью между перемещением и выходным сигналом при копструировании, в частности, достил ения линейной зависимости, катод и анодное устройство выполнены плоскими и параллельными друг другу, а подвижная система частично перекрывает площадь между ними.
2.Механотрон по п. 1, отличающийся тем, что, с целью достижения наибольщей простоты, анодное устройство выполнено в виде
15 пластины.
3.Механотрои по п. 1, отличающийся тем, что, с целью примепения мостовой схемы, анодное устройство выполнено в виде двух нластин, расположенных по одну сторону ка0 тода или по обе стороны.
- 4. Механотрон по п. 3, отличающийся тем, что подвижная система выполнена в виде пластины, частично перекрывающей площадь между катодом и одним из анодов.
5
5.Механотрон по п. 3, отличающийся тем, что, с целью повышения чувствительности при включении в смежные плечи мостовой схемы, подвижная система выполнена в виде пластины, частично перекрывающей площади между катодом и обоими анодами.
6.Механотрон по п. 3, отличающийся тем, что, с целью повышения чувствительности
5 при включении в противоположные плечи моста, подвижная система выполнена в виде двух пластин, частично перекрывающих площади между катодом н анодами.
7.Механотрон по пп. 1-6, отличающийся 0 тем, что, с целью повышения чувствительности по напряжению, между катодом и подвижной системой установлена сетка.
8.Механотрон по пп. 1-6, отличающийся 5 тем, что, с целью повыщепия чувствительности по напряжению, между анодами и подвижной системой установлена сетка.
9.Механотрон по пп. 1-8, отличающийся тем, что, с целью измерения угла поворота
0 корпуса относительно горизонтальной плоскости, подвижная система выполнена в виде маятника.
10.Механотрон по п. 9, отличающийся тем, что, с целью достилсения линейной зависимости от угла поворота, подвижная система выполнепа в виде серпа, наружная часть которого образована дугой окружности, внутренняя часть образована дугой спирали Архимеда, причем центр окружности и спирали
совпадают с точкой подвеса.
H
fus. 7
аг.2
г.З
(/гЛ
.5
| название | год | авторы | номер документа |
|---|---|---|---|
| Двуханодный диодный или триодный механотрон с неподвижным подогревным катодом и неподвижной сеткой | 1961 |
|
SU145936A1 |
| ДАТЧИК УГЛОВОЙ СКОРОСТИ | 1970 |
|
SU268765A1 |
| ТРИОДНЫЙ МЕХАНОТРОН ПРОДОЛЬНОГО УПРАВЛЕНИЯ | 1972 |
|
SU329372A1 |
| Частотный датчик давления | 1982 |
|
SU1103098A1 |
| МЕХАНОТРОН | 1998 |
|
RU2156515C2 |
| Устройство для непрерывного контроля диаметра тонкой проволоки | 1960 |
|
SU131896A1 |
| Силоизмерительный датчик | 1976 |
|
SU662830A1 |
| МЕХАНОТРОННЫЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 1972 |
|
SU329376A1 |
| Механотронный преобразователь | 1990 |
|
SU1791732A1 |
| Вибропреобразователь | 1982 |
|
SU1145249A1 |