(54) СИЛОИЗМЕРИТЕЛЬНЬШ ДАТЧИК
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухкомпонентный силоизмерительный датчик | 1979 |
|
SU1046628A1 |
| Динамометр | 1981 |
|
SU1052892A1 |
| Механотронный динамометр | 1978 |
|
SU1002855A1 |
| Механотронный преобразователь | 1979 |
|
SU821967A1 |
| Двухкоординатный механотрон продольного управления | 1975 |
|
SU524253A1 |
| Аппарат для контактной сварки | 1974 |
|
SU519299A1 |
| Силоизмерительное устройство | 1986 |
|
SU1339415A1 |
| Механотронный преобразователь линейных перемещений | 1991 |
|
SU1816961A1 |
| Механотронный преобразователь | 1990 |
|
SU1791732A1 |
| Устройство для измерения усилий | 1976 |
|
SU555297A1 |
1
Изобретение относится к измерительной технике и предназначено для измерения векторных величин усилий.
Известное силоизмерительное устройство для измерения вектора усилий, выполненное на базе плоской упругой рамы и системы, передающей ее деформации на измерите 1ь, не обеспечивает требуемую чувствительность и точность измерений из-за наличия трения в узлах при передаче усилия от рамы к чувствительным элементам
Наиболее близким по технической сущности к изобретению является силоизмерительный датчик, содержащий неподвижную колодку, в которой закреплен механотронный преобразователь перемещений, и подвижную колодку, связанную через упругую систему со штырем механотронного преобразователя 2.
К недостаткам известного , силоизмерительного датчика относится невозможность измерения компонентов плоскостного вектора силы.
Цель изобретения заключается в обеспечении измерения компонентов плоскостного вектора силы.
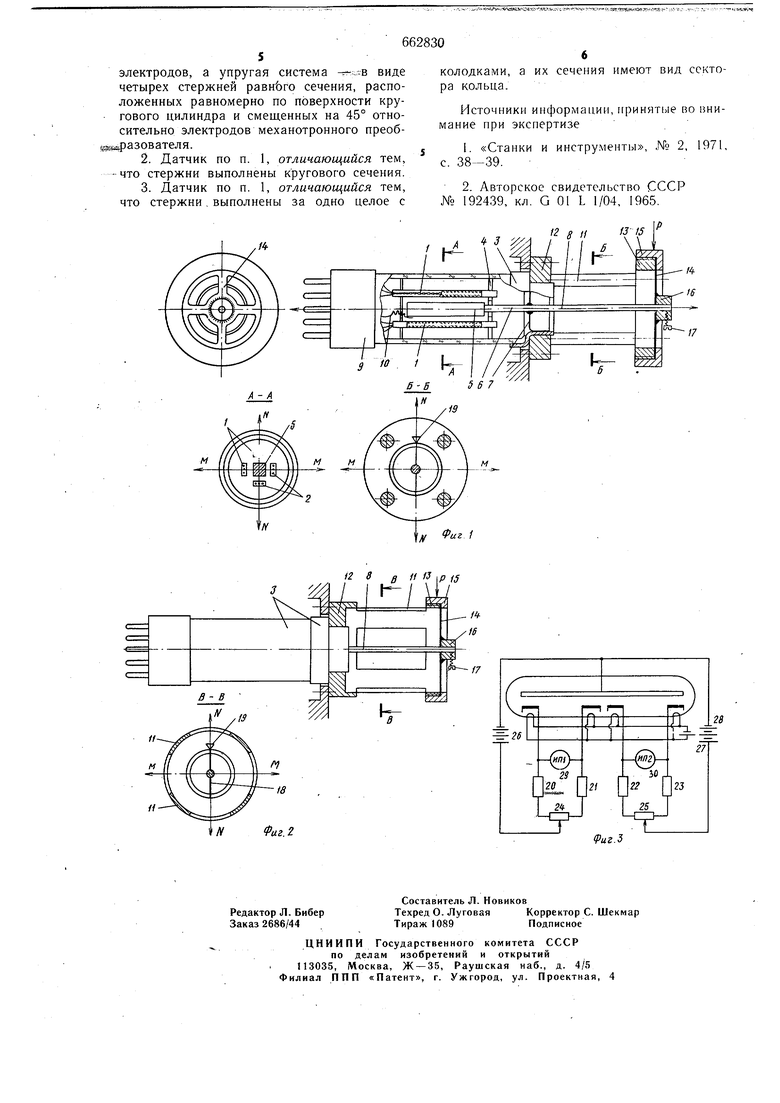
Указанная цель достигается за счет того, что механотронный преобразователь выполнен двухкоординатным с четырьмя парами электродов, а упругая система - в виде четырех стержней равного сечения, расположенных равномерно по поверхности кругового цилиндра и смещенных на 45° относительно электродов механотронного преобразователя, а также за счет того, что сечение стержней выполнено круговым и стержни выполнены за одно целое с колодками, а их сечение выполнено в виде сектора кольца. На фиг. 1 и 2 изображены варианты выполнения предлагаемого силоизмерительного датчика; на фиг. 3 - принципиальная электрическая схема включения двухкоординат5 ного диодного механотронного преобразователя перемещений с четырьмя катодами и одним общим анодом.
Двухкоординатный механотронный преобразователь (фиг. 1) содержит четыре электрода 1 и 2, являющихся катодами и жестко
0 связанных с корпусом 3 посредством слюдяных изоляторов 4, и общий под вижный анод 5 квадратного сечения, укрепленный на стер/хне 6, впаянном в эластичную мембрану 7, являющуюся частью вакуумированной оболочки механотронного преобразователя.
Внешняя часть стержня образует подвижный штырь 8 механотронного преобразователя. Для соединения электродов механотронного нреобразователя с электрической схемой (фиг. 3) служит октальный цоколь 9. Подвижный анод 5 электрически соединяется с выводом цокойя посредством гибкой контактной пружинки 10. Упругая система силоизмерительного датчика (фиг. 1 выполнена в виде четырех параллельных друг другу стержней 11, расположенных рав.иомерно по поверхности кругового цилиндра, смещенных на 45° относительно электродов механотронного преобразователя и жестко соединенных на концах с колодками 12 и 13. В неподвижной колодке 12 укреплен корпус 3 двухкоординатного механотронного преобразователя. Подвижная колодка 13 посредством эластичной фигурной пружины 14, зажатой между колодкой 13 и гайкой 15, втулки 16 и винта 17 соединена с подвижным концом штыря 8.
На фиг. 2 изображена другая модификация конструкции силоизмерительного датчика. В этом случае стержни 11 упругой системы выполнены за одно 1,елое с колодками 12 и 13 и имеют сечение в виде секторов кольца. Оси наибольшей чувствительности механотронного преобразователя ММ и NN перпендикулярны плоскостям, проходяш,им через центры тяжести сечений стержней упругой системы (см. фиг. 2,сечение В-В).
Механотронный преобразователь имеет две оси наибольшей чувствительности по току к перемешению:оси ММ и NN (фиг. 1, сеченрге А-А). В то же время оси ММ и NN являются осями прямоугольных координат, но которым происходит разложение на компоненты измеряемого вектора усилия.
С целью снижения погрешности измерения в предлагаемом силоизмерительном датчике Механотронный преобразователь должен быть установлен таким образом, чтобы , его оси наибольшей чувствительности ММ и NN были бы пернендикулярнй плоскос- тям, нроходящим через пары близлежащих стержней упругой системы, как это показано на фиг. 1 (сечение Б-Б). При этом оси первых перемычек 1 - Г и П - 1Г фигурной пружипы 14 должны совпадать с осями .ММ и NN механотрона.
Для обеспечения правильной установки механотронного преобразователя в упругой системе на его фланце имеется индикаторная риска 18, совпадающая с осью NN, а на внутреннем торце неподвижной колодки выгравирован треугольный указатель 19. При установке механотронного преобразователя индикаторная риска 18 соййещается с указателем 19, как это показано на фиг. 1 и 2. Угловое смещение механотронного преобразователя относительно упругой системы
на 1-2° практически не влияет на точность измерений.
Принципиальная электрическая схема включения силоизмерительного датчика (фиг. 3) содержит четыре катодных нагрузки - резисторы 20, 21, 22, 23, регулировочные резисторы 24, 25, источники анодного напряжения 26, 27, источник напряжения накала 28 и два выходных отсчетных прибора 29, 30, причем каждая из двух половин механотронного преобразователя, состоящая из анода и пары катодов, примыкаюш.их к противоположным граням анода, включается по мостовой схеме. Предварительно шкалы отсчетных приборов 29, 30 тарируются в единицах силы путем подачи на подвижную кол.одку13 вдоль осей ММ и NN (поочередно) калиброванных усилий. Перед началом измерений оба моста схемы фиг. 3 балансируются с помощью регулировочных резисторов 24, 25, причем отсчетные приборы 29, 30 приборы устанавливаются на нуль.
9 Измеряемое усилие Р (фиг. 1 и 2) воздействует непосредственно на боковую поверхность гайки 15, которая выполняет роль силовоспринимающей поверхности шириной а. При этом усилие Р можетбыть приложеJ но к любой точке указанной поверхности, что расширяет возможности применения. Под воздействием усилия Р подвижная колодка 13 перемещается относительно неподвижной колодки 12. Указанное перемещение через пружину 14 передается штырю механотронного преобразователя и вызывает соответствующее смещение его анода 5 относительно катодов 1, 2. При этом в мостовых схемах (фиг. 3) возникает разбаланс напряжений, который может бь1ть отсчитан
5 по отсчетным приборам 29, 30. Показание каждого из этих отсчетных приборов пропорционально одной из двух составляюц.1.их измеряемого вектора усилия, который таким образом раскладывается на составляющие (компоненты) в прямоугольной системе ко ординат с осями ММ и NN.
Зная расположение в пространстве осей ММ и NN и значения обеих составляющих измеряемого усилия, обычными методами можно найти величину (модуль) и направлеS ние плоскостного вектора усилия Р.
Формула изобретения
