Известные устройства для контроля скорости вращения вала., например, электродвигателя, содержащие интегрирующий элемент, :бесконтактны:й коммутатор, подключенный к амплитудному дискриминатору, элемент вре.менной задержки и выходное электромагнит.ное реле. Бе обеспечивают высокой надежности и точности.
Предложенное устройство устраняет указанные недостатки за счет того., что оно снабжено датчиком симметричных прямоугольных .импульсов, ось которого связана с вращающимся Валом, а выход подключен ко входу бесконтактного коммутатора.
-На фиг. 1 представлена принципиальная электрическая схема предложенного устройства; на фиг. 2 - блок-схема предложенного устройства управления исполнительным органом между двумя пределами скоростей V и Vz в период замедления; на фиг. 3 - временная диаграмма импульсов управления устройством по фиг. 2; на фиг. 4 - блок-схема устройства управления иснолнительным органом между двумя пределами скоростей - произвольной УО и скоростью Vl в процессе ускорения; на фиг. 5 и 6 - временные диаграммы импульсов управления устройством согласно фиг. 4; на фиг. 7 - блок-схема устройства управления исполнительным органом между двумя пределами скоростей Vi и в
процессе ускорения; на фиг. 8 - временная диаграмма импульсов управления устройством согласно фиг. 7.
Устройство состоит из предварительного
детектора /, периодически работающего под действием выступов кулачкового диска 2 с пазами, который вращается вместе с валом 3 со скоростью вращения машины. Он соединен с электронным дискриминатором, который содержит конденсатор 4, транзистор 5 с переходом п-р-п, с базой которого он соединен, интегрирующий блок, состоящий из конденса тора 6 и регулируемого сопротивления 7. Устройство так.же содержит диод Зенера 8, транзистор 9 с переходом п-р-п и линию задержки времен, которая следует после детектора и имеет прерыватель 10, соединенный с транзистором 9, реле //, конденсатор 12, который возбул-сдает реле 13 для управления
электромагнитным органом 14 (реле 13 дает ток реле // во время разрядки конденсатора 12), а также сопротивление 15 небольшой величины в коллекторной цепи транзистора 5. Прерыватель 10, предназначенный для того, чтобы вызвать срабатывание устройства, когда скорость машины замедляется, замкнут только тогда, когда контактор общего управления машины не работает, что исключает, следовательно, возбуждение электромагнита в
Устройство работает следующим образом.
Когда диск 2 вращается, детектор 1 передает ряд сигналов прямоугольной формы отрицательной полярности, амплитуда которых остается постоянной, но частота и, следовательно, период зависят от скорости вращения диска. Эти сигналы поступают через конденсатор 4 в цепь 6, 7 интегратора. Прн каждом сигнале конденсатор 6 заряжается на величину
,
где V - амплитуда прямоугольного сигнала, k - постоянная времени, определяемая произведением значений элементов интегрирующей схемы; эта величина заряда зависит от времени t, в течение которого был приложен отрицательный сигнал.
Во время зарядки конденсатора 6 база транзистора 5 сохраняет отрицательный потенциал и транзистор остается в запертом состоянии. В конце сигнала условия блокировки больше не будут существовать, транзистор 5 станет проводящим и конденсатор 6 быстро разрядится через транзистор 5 и ннзкое сопротивление 15, На зажимах конденсатора 6 будет получен отрицательный сигнал, форма которого изображена на фиг. 3.
Когда скорость мащины замедляется в течение интервала времени интегрирования / /i, что соответствует скорости, определяемой условиями производства, напряжение U достигает значения IJ для диода 8, который становится проводящим; транзистор 9, в свою очередь, становится проводящим и возбул денное реле 11 замыкает свои контакты. Конденсатор 12, предварительно заряженный через сопротивление, разряжается на обмотку реле 13, которое также срабатывает. Один из контактов реле 13 начинает питать реле //, другой контакт управляет электромагнитным органом 14, который сохраняет возбуждение до тех пор, пока напряжение на зажимах конденсатора 12 станет недостаточным для сохранения замкнутого состояния реле 13.
Чувствительность устройства можно повысить путем увеличения числа выступов на кулачковом диске.
Сопротивление 7 является регулируемым, что позволяет точно выбрать скорость, при которой приводится в действие управляемый орган. Кроме того, путем выбора емкости конденсатора 12 можно снизить до нулевого значения интервал времени, в течение которого производится управление органом до или после полной остановки мащины. Еслн управление органом должно быть прекращено до остановки мащины, то удобно отказаться от цели конденсаторов и от схемы порогового детектора. В этом случае можно предусмотреть прерыватель, который срабатывает с короткой задержкой времени после прохождения (от транзистора 9 к реле //} первых импульсов.
Для поБЫшепия точпости можно заменить реле // н 13 ЛИНГП1 задержки времени на транзисторные логические схемы, время реакции которых значительно меньше времени реакции у этих реле.
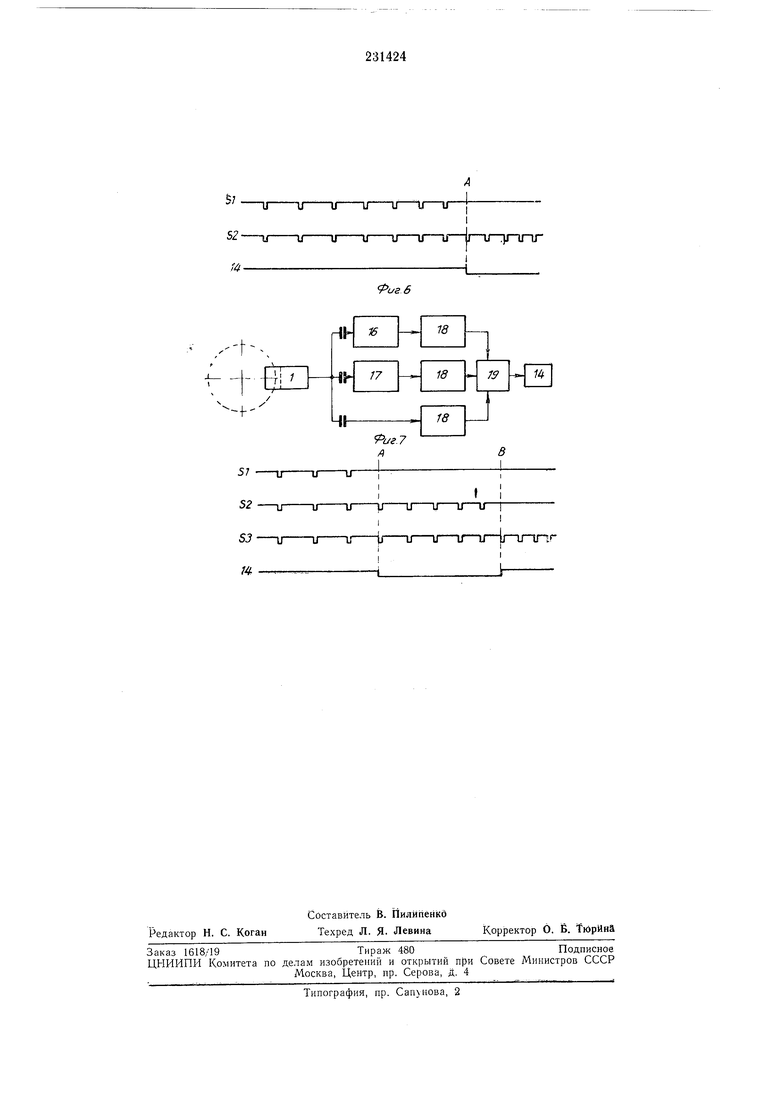
На фиг. 2 показана схема с двумя пороговыми детекторами 16 и 17, соединенными параллельно и получающнми нмпульсы от одного предварительного детектора /. Нороговые детекторы настроены на пуск соответственно при значениях S1 и S2 (фиг. 3), чтобы реагировать на два значения скорости l/i и V машины, между которыми необходимо управлять органом. Эти импульсы пропускаются, усиливаются и преобразуются но форме в схемах 18, образованных надлежащим соединением в такой же логический блок 19, который управляет электромагнитом управляемого органа 14. Импульсы S1 появляются тогда, когда скорость машины становится ниже V импульсы S2 возникают тогда, когда скорость машины ниже значения V,. Управляемый орган 14 получает команду в точке А при появлении первого сигнала S1. При появлении первого сигнала 52 команда исчезает в точке В.
В случае, показанном на фиг. 4, для управления устройством между значениями скоростей УО и У в процессе ускорения предусмотрен один пороговый детектор /6, логический блок 19 подключается каждый раз к этому детектору, который пропускает импульсы для запуска машины до тех пор, пока их амплитуда не станет ниже значения, соответствующего скорости V. Логический блок 19 прямо соединен с предварительным детектором 1, который дает постоянные импульсы с одинаковой частотой повторения. Эти импульсы усиливаются и преобразуются по форме при прохождении через логическую схему.
Как показано на диаграмме фиг. 5 команда
дается первым импульсом 51, если первый импульс 52 не сопровождает импульсы 5i. Если речь идет просто о задерн ке пуска устройства относительно момента запуска машины, которая должна начать работать во время ускорепия, можно использовать такую же схему, причем логический блок 19 на этот раз будет выполнять функцию, которая графически изображена на с|)иг. 6. Управляемый орган получает команду в точке А, когда он получает
импульс 52 без получения импульса 51; он запускается в работу, пока не сработало устройство размыкания, например прерыватель или реле с задержкой времени.
Схема может содержать дополнительную детекторную ступень, когда речь идет об управлении процессом ускорения между двумя пределами скоростей l/i и Vg. Эта схема показана на фит. 7 с двумя пороговыми детекторами 16 и 17, соединенными параллельно, с
пульсов между детектором 1 и логический блок 19, которая получает постоянные импульсы непосредственно от детектора / после их усиления и формирования. Детекторы 16 и 17 получают эти импульсы, пока машина не достигает соответственно скорости V и V-. Во время запуска машины поступают импульсы 53 (фиг. 8), когда скорость машины ниже V, или импульсы 52, когда скорость машины ниже Vz. Эта схема управляет органом в точке А при получении импульсов 52 без импульсов 51 до тех пор, пока в точке В не будет получен импульс 53.
3
Предмет изобретения
Устройство для контроля скорости вращения вала, например, электродвигателя,; еодержащее интегрирующий элемент, бесконтактный коммутатор, подключенный к амплитудному дискриминатору, элемент временной задержки И выходное электромагнитное реле, отличающееся тем, что, с целью повышения
надежности, оно снабжено датчиком симметричных прямоугольных импульсов, ось которого связана с вращающимся вало1М, а выход указанного датчика подключен ко входу бесконтактного коммутатора.
«- .
f п f /J
ОС 6 Л)
8 9 Ю
;


| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для УПРАВЛЕНИЯ ТЕКСТИЛЬНЫМИ МАШИНАМИ ПРИ ПРОПУСКЕ ШВОВ ТКАИИ | 1973 |
|
SU406984A1 |
| УСТРОЙСТВО ПОИСКА И СОПРОВОЖДЕНИЯ СИГНАЛА СИНХРОНИЗАЦИИ В СПУТНИКОВЫХ СИСТЕМАХ СВЯЗИ ПО ПРИЕМУ | 1995 |
|
RU2093964C1 |
| Электронное устройство реверсирования активатора стиральной машины | 1987 |
|
SU1463825A1 |
| Электронный коммутатор | 1990 |
|
SU1781448A1 |
| ЭЛЕКТРОСТИМУЛЯТОР НЕЙРОАДАПТИВНЫЙ | 1997 |
|
RU2135226C1 |
| Устройство для электроразведки в движении | 1985 |
|
SU1242884A1 |
| Аппарат магнитной записи | 1983 |
|
SU1081662A1 |
| Регулятор с переключаемыми параметрами | 1978 |
|
SU744445A1 |
| Устройство для моделирования электромагнитных процессов в асинхронных машинах | 1989 |
|
SU1681315A1 |
| ИЗМЕРИТЕЛЬ СКОРОСТИ ЗВУКА | 1998 |
|
RU2152597C1 |
5;-V
II
5г-рUии-U-U-К-I/-Ц-iT-inr
иг4
и U и и I
-ц I jj u и U innr
S3ir
f4 --
