Известна система индикации бокового отклоиеиия корабля от линии иоложения кабеля. Однако вследствие скачкообразного изменения над кабеле разности фаз между вертикальной и горизонтальной составляющими магнитного иоля кабеля иа 180° в системе производится переключение фазы вертикальной составляющей иа 180 в момент перехода через линиЕО положения кабеля.
В иредлагаемую систему введены два удвоителя частоты и фазы, входы которых подключены к усилптелям, а выходы подсоединены к входу следяи;ей системы. Измеряют разность- фаз между вторыми гармоникамн вертикальной и горизонтально составляющих магнитного поля кабеля, питаемого переменным током, после удвоегпш частоты и фазы напряжений удвоителями с иомощью следящей системы измерения разности фаз вторых гармоник. Это позволяет нзбежать переключеиия фазы вертикальной составляющей иа 180°, повьииает разрешающую способность системы и точность определения местоположения судна относительно кабеля.
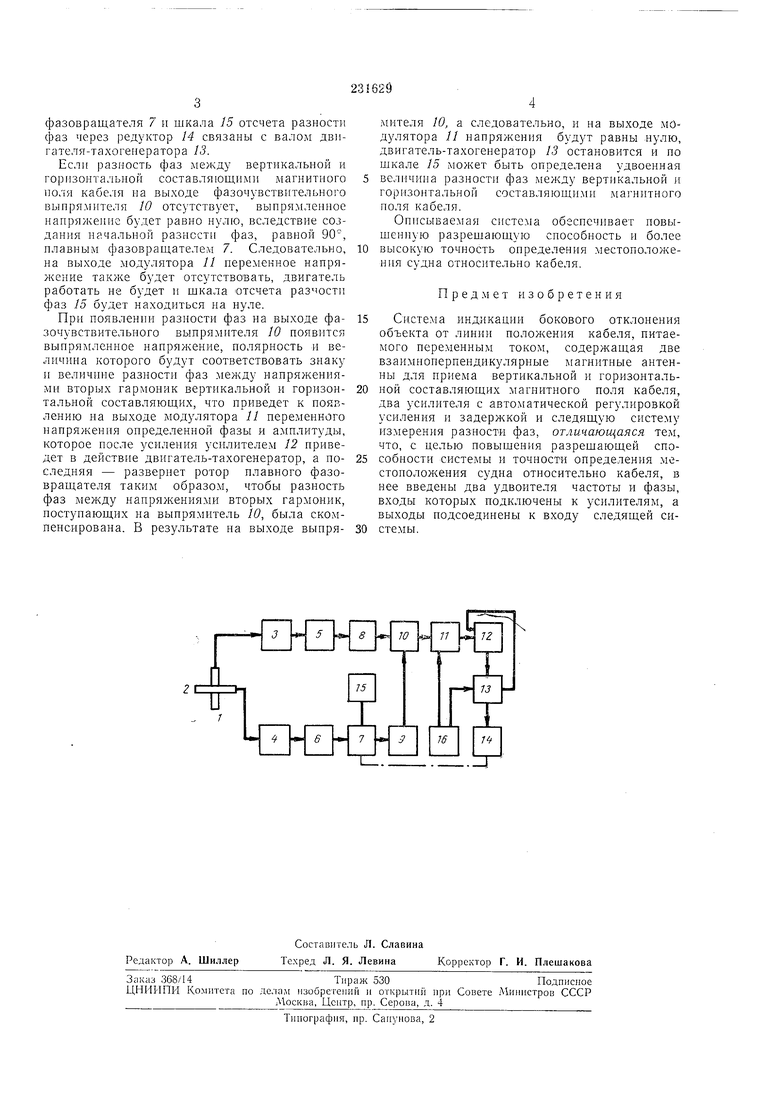
На чертеже иоказана блок-схема 1И1Д11катора.
для приема вертикальной
и горизонтальной
составляюи1, магнитного иоля кабеля, усплители о II т с автоматическо регулировкой
силения и задержкой: следяи1ую систему измерения разности фаз сжду вторым гap oiiUKaM : состоя цн| из двух частот фаз., 5 6 плав1П)Й фазоврандатель 7 BTopoii rapNiOH Ki ; 8 и .9, фазочувствительный выирямнтсль 10, oдyлятop //, усилитель 12, дв 1гатель-тахоге 1ератор /.Л связанный через редуктор /-/ с poтopo плавного фазоврандателя 7, а валу которого меется нкала /5 отсчета разности фаз; блок 16 для питания дв 1гателя-тахогеиератора и модулятора.
Работа с стемы осуществляется cлe;|y oнl,н образом.
Верт 1кальная ор 130 1талы ая составля ощпе маги тиого поля кабеля пидукт 1руют в / .2 электродвижущие , которые после усилеи 1я ус1 Л телями , и 4 посту1 а от в удвоител частоты i разност фаз 5 1 6. С выхода удвоителя 5 1 апряже 1 е второй оступает на фазочуветв тельный выпрям тель 10 через 8, а с выхода удвоителя 6 - на фазочувствительный .тeль 10 через плавный фазовращатель 7 и ус 1литель 9. Выпрямитель 10 уиравляет работой дв1 гателя-тахогеие )атора с по. модулятора // уснлптеля 12. Ротор
фазовращателя 7 и шкала 15 отсчета разности фаз через редуктор 14 связаны с валом двигателя-тахогенератора 13.
Если разность фаз между вертикальной и горизонтальной состаБЛяющи МИ магнит11ого иоля кабеля на выходе фазочувствительного выиря-мителя 10 отсутствует, выирямленное нанряжеиие будет равно нулю, вследствие создания начальной разности фаз, равной 90°, илавиым фазовращателем 7. Следовательно, на выходе модулятора // переменное напряжение также будет отсутствовать, двигатель работать не будет и пдкала отсчета разчости фаз 15 будет находиться на пуле.
При появлении разности фаз на выходе фазочувствнтельиого выпрямителя 10 появится выпрямлеппое папряженне, полярность и величина которого будут соответствовать знаку и величиие разности фаз между напряжениями вторых гармоник вертикальной и горизонтальной составляющих, что приведет к появлению на выходе модулятора 11 переменного напряжения определенной фазы и амплитуды, которое после з-тиления усилителем 12 приведет в действие двигатель-тахогенератор, а последняя - развернет ротор плавпого фазовращателя таким образом, чтобы разность фаз между напряжениями вторых гармоник, поступающих на выпрямитель 10, была скомпенсирована. В результате на выходе выирямителя 10, а следовательно, н на выходе модулятора // напряжения будут равны нулю, двигатель-тахогенератор 13 остановится и по шкале 15 может быть определена удвоенная величина разности фаз между вертикальной и горизонтальной составляющими магнитного иоля кабеля.
Оппсываемая система обеспечивает повышенную разрешающую способность и более высокую точиость определения местоположения судна относительно кабеля.
Предмет изобретения
Система индикации бокового отклонения объекта от линии положения кабеля, питаемого переменным током, содержащая две взаимноперпендикулярные магнитные антенны для приема вертикальной и горизонтальной составляющих магнитного поля кабеля, два усилителя с автоматической регулировкой усиления и задержкой и следящую систему измерения разности фаз, отличающаяся тем, что, с целью повышения разрешающей способности системы и точности определения местоположения судна относительно кабеля, в нее введены два удвоителя частоты и фазы, входы которых подключены к усилителям, а выходы подсоединены к входу следящей системы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения азимута скважины | 1976 |
|
SU709805A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОЙ ПОДСТРОЙКИ ФАЗЫ ДВУХ ГЕНЕРАТОРОВ | 1970 |
|
SU285992A1 |
| ИНДИКАТОР ВЕДУЩЕГО КАБЕЛЯ ДЛЯ ВОЖДЕНИЯ СУДОВ ПО КАБЕЛЮ | 1966 |
|
SU223153A1 |
| Преобразователь азимута | 1980 |
|
SU947408A1 |
| Магнитометр | 1979 |
|
SU834623A1 |
| Магнитометр | 1980 |
|
SU935839A1 |
| Феррозондовый преобразователь азимута | 1981 |
|
SU956773A1 |
| Феррозондовый датчик азимута | 1979 |
|
SU802535A1 |
| ВСЕСОЮЗНАЯ IПАШТ1ШЧЕХ(^^^'=НП:{АШ БИБЛИОТа.Ч.^^ I | 1972 |
|
SU349515A1 |
| УСТРОЙСТВО для ИЗМЕРЕНИЯ СЛАБЫХ СИГНАЛОВ ПОСТОЯННОГО ТОКА | 1971 |
|
SU316021A1 |
