Известно рабочее оборудование одноковшового экскаватора, включающее стрелу, рукоять и KOBHI.
Целью изобретения является уменьшение динамических нагрузок, возникаюш.их во время работы оборудования.
Это достигается тем, что на свободном конце рукояти смонтировзно упруго-поглошаюшее звено, например пружинно-фрикционное.
Пружинно-фрикционное звено может быть установлено между хомутами, один из которых имеет возможность перемеше шя по направляющим, жестко закрепленным внутри рукояти.
В качестве упруго-иоглощающего звена возможно применение таКже резино-металлического, гидравлического и др.
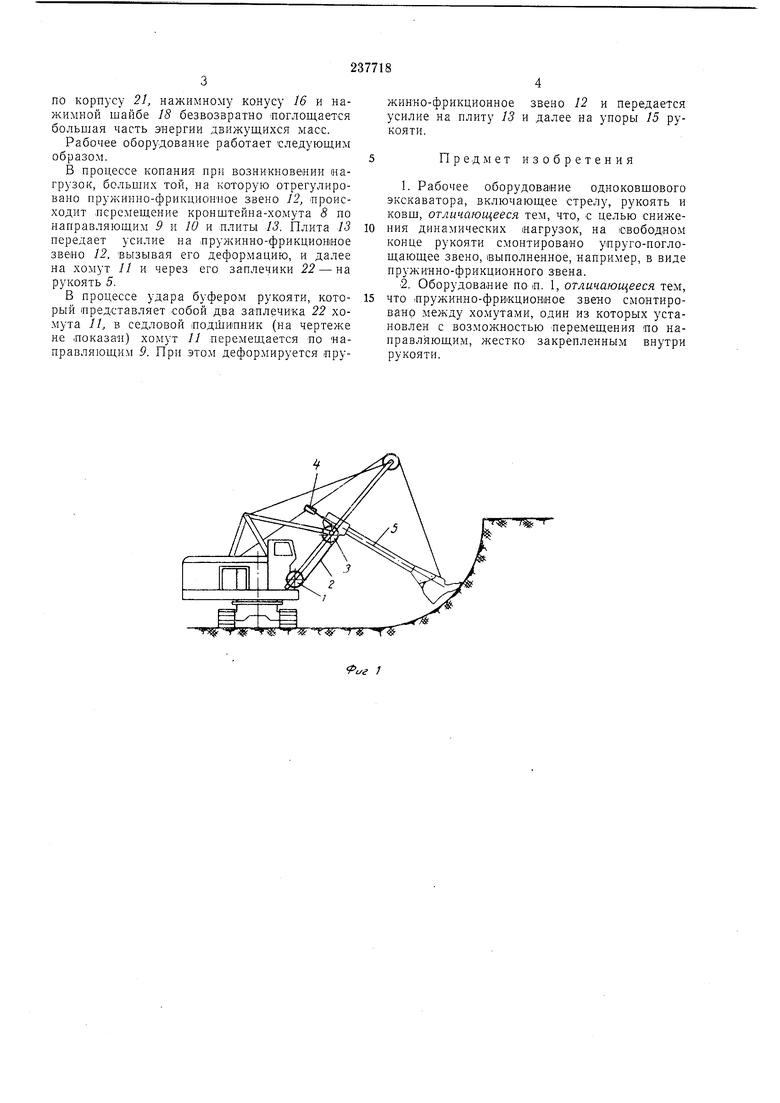
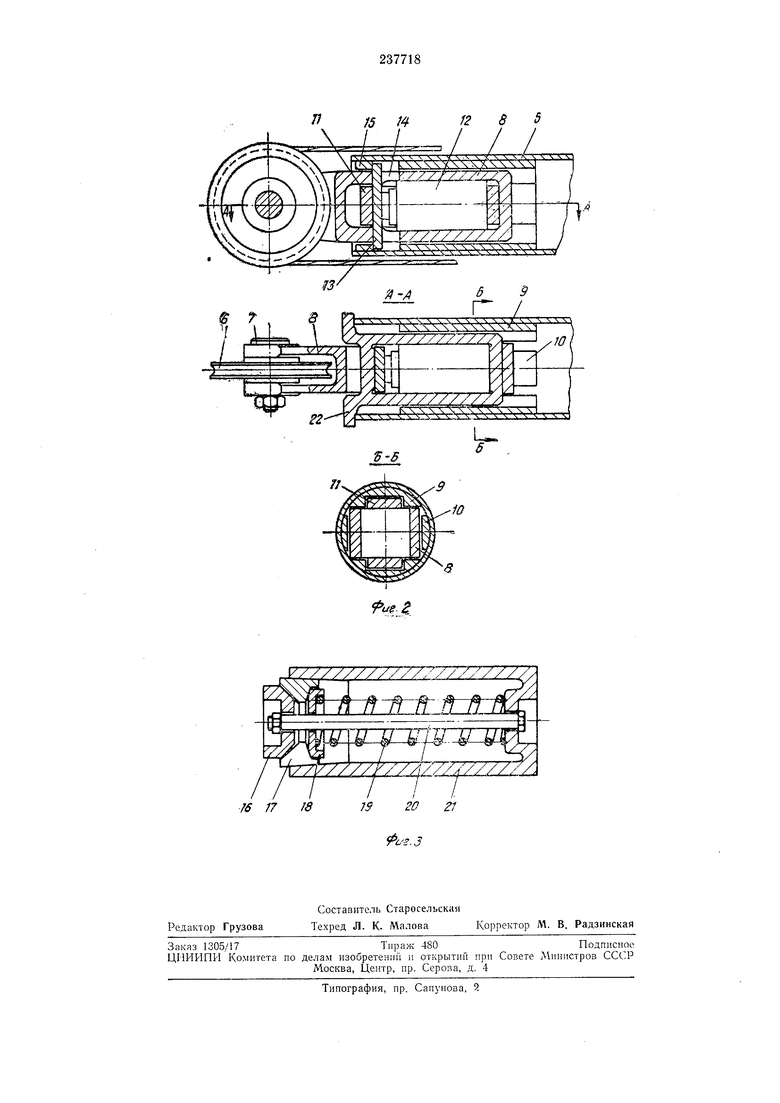
На фиг. 1 представлена схема расположения узлов рабочего оборудования экскаватора; на фиг. 2 - установка упруго-поглощающего звена; на фиг. 3 - конструкция пружинно-фрикционного звена.
От барабана 1 напорно лебедки через канат 2, отклоняемый блоком 8, и упруго-поглошающее звено 4 усилие передается на рукоять 5.
блок 6 на осп 7, закрепленной в кронштейнехомуте 8, установленном в нанравляющих 9 и 10, жестко укрепленных в рукояти 5.
Внутри этого хомута размещен второй хомут // таким образом, что вместе они образуют виутренлее замкнутое иространство. В этом пространстве между хомутами смонтированы пружинно-фрикционное звено 12 и плита 13, концы которой проходят через специальные щели 14 в кронщтейне-хомуте 8. Хомут // установлен в направляющих 9. рукояти 5 у ее конца расположены два жестко связанных с ней упора 15.
Пружинно-фрикццонное звено состоит из нажимного конуса 16, системы клиньев 17, нажимной шаГ1бы 18, 1пружины 19, стяжного болта с гайко 20 и корпуса 21.
Звено 12 может быть предварительно отрегулировано на определенную нагрузку стяжным болтом с гайкой 20. При возникновении иагрузок, больших той, на которую отрегулировано звено Г2, нажимной конус 16 передает усилие на систему клиньев 17, и клинья, сдвигаясь между Собой, смешаются внутрь корпуса 21, имеющего в этой зоне внутреннюю коническую поверхность.
по корпусу 21, нажимному конусу 16 и нажимной шайбе 18 безвозвратно поглощается большая часть энергии движущихся масс.
Рабочее оборудование работает следующим образом.
В процессе копания при возникновении нагрузок, больших той, на которую отрегулировано пружинно-фрикциоНное з:вено 12, происходит перемещение кронштейна-хомута 8 по направляющим 9 и 10 и плиты 13. Плита 13 передает усилие на пружинно-фрикционное звено 12, вызывая его деформацию, и далее на хомут 11 и через его за плечики 22 - на рукоять 5.
В процессе удара буфером рукояти, который представляет собой два заллечи-ка 22 хомута )/, в седловой оодшиппик (на чертеже не локазнн) хомут // перемещается по направляющим 9. При этом деформируется пружинно-фрикционное звено 12 и передается усилие на плиту 13 и далее на упоры 15 рукояти.
Предмет изобретения
1.Рабочее оборудование одноковшового экскаватора, включающее стрелу, рукоять и ковш, отличающееся тем, что, с целью снижения динамических нагрузок, на свободном конце рукояти смонтировано упруго-поглощающее звено, выполненное, например, в виде пружинно-фрикционного звена.
2.Оборудование по о. 1, отличающееся тем, что -пружинно-фрикционное звено смонтировано между хомутами, один из которых установлен с возможно-стью перемещения по направляющим, л естко закрепленным внутри рукояти.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАБОЧЕЕ ОБОРУДОВАНИЕ ЭКСКАВАТОРА | 1970 |
|
SU282157A1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ОДНОКОВШОВОГО ЭКСКАВАТОРА | 1965 |
|
SU177354A1 |
| КАНАТНЫЙ НАПОРНЫЙ МЕХАНИЗМ ЭКСКАВАТОРОВ | 1969 |
|
SU238414A1 |
| Рабочее оборудование одноковшового экскаватора | 1980 |
|
SU1044734A1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ОДНОКОВШОВОГО ЭКСКАВАТОРА ТИПА ОБРАТНАЯ ЛОПАТА | 1969 |
|
SU240542A1 |
| Рабочее оборудование одноковшового экскаватора | 1977 |
|
SU713948A1 |
| СМЕННОЕ РАБОЧЕЕ ОБОРУДОВАНИЕ ОДНОКОВШОВОГО ЭКСКАВАТОРА | 1967 |
|
SU197452A1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ОБРАТНОЙ ЛОПАТЫ ГИДРАВЛИЧЕСКИХ ОДНОКОВШОВЫХ ЭКСКАВАТОРОВ | 2004 |
|
RU2266371C1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ОДНОКОВШОВОГО ЭКСКАВАТОРА ТИПА ПРЯМАЯ ЛОПАТА | 1970 |
|
SU281269A1 |
| Рукоять экскаватора с канатным механизмом напора | 1990 |
|
SU1788997A3 |
гг 8 5
