Изобретение относится к горному и строительному делу. Разработано для расширения возможностей одноковшовых гидравлических экскаваторов при рытье котлованов, выемок, траншей, сооружении устьев шахтных вертикальных стволов, фундаментов под проходческие копры, подъемные машины, компрессорные станции и вентиляторные установки, а также в промышленном и гражданском строительстве. Кроме того, экскаваторы с рабочим оборудованием обратная лопата используются при разработке и добыче полезных ископаемых открытым способом.
Одноковшовые экскаваторы, оборудованные обратной лопатой, служат для разработки грунта, руд и других полезных ископаемых, находящихся ниже опорной поверхности самого экскаватора. Достоинством гидравлических одноковшовых экскаваторов с рассматриваемым видом рабочего оборудования по сравнению с механическими экскаваторами является то, что они вынимают горную массу на большую глубину и могут успешно работать по грунтам I -IV категории плотности.
Известны конструкции рабочего оборудования с обратной лопатой гидравлических одноковшовых экскаваторов (см. Горнопроходческие машины и комплексы. Грабчак Л.Г. и др. М.: Недра, 1990, с.313; Машины для земляных работ / под ред. Н.Г.Гаркави. М.: Высшая школа, 1982, с.132; Гальперин М.И., Домбровский Н.Г. Строительные машины. М.: Высшая школа, 1980, с.212; Беркман И.Л., Раннев А.В., Рейш А.К. Универсальные одноковшовые строительные экскаваторы. М.: Высшая школа, 1981, с.99-101).
Стрела обычно выполняется изогнутой конструкции. Она может быть моноблочной или состоять из двух частей: основной (коренной) и удлиняющей (концевой), соединенных между собой шарнирно и связанных жесткой тягой. Рукоять прямая моноблочной конструкции. Ковш на конце рукояти может закрепляться жестко или быть поворотным.
К недостаткам следует отнести то, что каждый тип гидравлического одноковшового экскаватора способен вынимать горную массу на строго определенную глубину, которая определяется геометрическими размерами стрелы и рукояти (высотой стрелы в транспортном положении и длиной рукояти). Увеличение этих параметров на отдельном типе экскаватора практически невозможно, так как ведет к увеличению массы рабочего оборудования, что может привести к опрокидыванию поворотной платформы экскаватора.
Близким по назначению и частично по конструктивному исполнению является рабочее оборудование гидравлического экскаватора, известного по а.с. СССР №759658, Е 02 F 3/38 «Рабочее оборудование гидравлического экскаватора».
В рабочем оборудовании, состоящем из стрелы и телескопически раздвижной рукояти с ковшом, рукоять состоит из наружной и внутренней телескопически выдвижной частей. При этом сочленение внутренней части с наружной выполнено в виде фланца с шариками и винтовыми канавками на внешней поверхности внутренней части (телескопически выдвижной).
Необходимо отметить, что рабочее оборудование любых типов экскаваторов при выемке грунтов, полезных ископаемых и выгрузке породы из забоев подвергается сильному засорению абразивной пылью и мелкими кусочками породы. Таким образом, винтовые канавки при работе будут засоряться, и для обеспечения надежной работы такого соединения необходимы частые технические обслуживания и, следовательно, низкая надежность работы оборудования, а само соединение будет быстро изнашиваться.
Вторым недостатком рассматриваемого рабочего оборудования является сравнительно небольшая телескопическая раздвижность, обусловленная длиной наружной части и размещенного внутри нее гидродомкрата раздвижки. Величина раздвижки ограничивается длиной хода штока гидродомкрата, который своим цилиндром прикреплен к внутренней поверхности наружной части, а штоком к верхнему концу внутренней телескопически выдвижной части.
Третий недостаток заключается в том, что при подъеме рабочего оборудования из котлована телескопически раздвинутая рукоять ковша не впишется в габариты стрелы и такое оборудование с наполненным ковшом невозможно поднять выше уровня стоянки экскаватора. Уменьшение длины рукояти с наполненным ковшом невозможно, так как при втягивании внутренней части она вращается вместе с ковшом.
Четвертый недостаток заключается в том, что при внедрении ковша в грунт или горную массу на режущей части ковша возникают различные по величине сопротивления. В результате действия соответствующих сопротивлению сил ковш совместно с телескопически выдвижной частью, штоком и поршнем гидродомкрата раздвижки из-за отсутствия ограничения вращательному движению развернется на какой-то угол, величина которого определяется зазорами в шарнирах и сопряжениях направляющих шариков с винтовыми канавками. Результат такого разворота - значительное увеличение сопротивления внедрению ковша, так как он будет внедряться в забой также своей боковой поверхностью.
Пятый недостаток - в том, что при внедрении ковша в забой в месте сопряжения телескопически выдвижной и наружной частями рукояти возникает значительный изгибающий момент, который будет восприниматься точечными контактами шариков с гнездами и винтовыми канавками. Эти места контактов расположены в одной плоскости, перпендикулярной продольной оси.
В результате действия сил от изгибающего момента в местах контакта возникнут напряжения, значительно превосходящие упругие деформации и переходящие в пластические.
При циклической работе оборудования и воздействия, помимо статических, динамических нагрузок через краткий промежуток работы направляющие шарики будут вырваны из гнезд. Произойдет отказ оборудования.
Таким образом, рассмотренная конструкция не обеспечивает надежной работы рабочего оборудования гидравлического экскаватора и не позволяет значительно увеличить глубину копания.
Известно рабочее оборудование погрузчика (патент №2070953 C1, E 02 F 3/38).
Рабочее оборудование погрузчика с обратной лопатой предназначено для механизации погрузки в транспортные средства сыпучих и мелкокусковых материалов. Рассматриваемое оборудование состоит из двух секций, при этом одна секция постоянной длины, а другая телескопически раздвижная. Телескопическая секция выполнена из наружной и телескопически выдвижной внутренней частей. Причем наружная и телескопически выдвижная части снабжены гидродомкратом раздвижки, расположенным внутри выдвижной части. Направленное перемещение внутренней части с ковшом выполнено в виде сквозного жесткого направляющего паза, вырезанного на наружной части, и проушины, размещенной на противоположном конце рабочему органу внутренней части.
Рассматриваемое сопряжение между наружной и внутренней частями телескопической секции при погрузке сыпучих и мелкокусковых материалов достаточно надежно, так как основная нагрузка при работе ковша продольная. Изгибающий момент при работе оборудования сравнительно невелик, так как сопротивление внедрению режущей части ковша в сыпучие и мелкокусковые материалы по сравнению с сопротивлениями внедрению ковша экскаватора в плотные грунты и крупнокусковую горную массу незначительны. При работе ковша погрузочного оборудования практически отсутствует крутящий момент, возникающий при внедрении ковша экскаватора. Поэтому сопряжение, выполненное в виде сквозного паза и проушины, не обеспечит надежность работы оборудования экскаватора из-за малой площади контакта между внешней и внутренней частями телескопической секции.
Наиболее близким по конструктивному устройству и назначению является рабочее оборудование гидравлического одноковшового экскаватора, известного по RU 20917 U1. Рабочее оборудование обратной лопаты состоит из моноблочной стрелы и закрепленной на ней шарнирно телескопически раздвижной рукояти с ковшом, смонтированным на конце телескопически выдвижной части.
Основным недостатком телескопически раздвижной рукояти рассматриваемого рабочего оборудования является то, что она имеет сравнительно небольшую телескопическую раздвижность, так как гидродомкрат раздвижки размещен между внутренней поверхностью наружной части рукояти и верхним концом внутренней телескопической части.
Второй недостаток заключается в том, что при работе экскаватора нагрузки при внедрении ковша от изгибающего и крутящего моментов воспринимаются опорными направляющими роликами с небольшими площадями контактов.
На основании вышеизложенного имеется необходимость в разработке конструктивной схемы рабочего оборудования обратной лопаты для универсальных гидравлических одноковшовых экскаваторов при рытье глубоких котлованов различных поперечных размеров, а также при разработке и добыче полезных ископаемых открытым способом при большей высоте уступов и глубине котлованов.
Задачей настоящего изобретения является разработка конструктивной схемы рабочего оборудования обратной лопаты универсальных гидравлических одноковшовых экскаваторов для рытья котлованов различного назначения и добычи полезных ископаемых открытым способом. Разрабатываемое оборудование должно обеспечить выемку грунта и добычу полезных ископаемых на большую по сравнению с обычной глубину (высоту) копания с высокой надежностью работоспособности.
Согласно изобретению поставленная задача достигается тем, что рабочее оборудование обратной лопаты гидравлических одноковшовых экскаваторов, включающее изогнутую стрелу и связанную с ней шарнирно телескопически раздвижную рукоять, состоящую из основной и вспомогательной телескопически выдвижной частей, со смонтированном на внешнем конце последней ковшом, гидродомкраты для поворота стрелы и рукояти, а также гидродомкрат телескопической раздвижки рукояти, причем вспомогательная телескопически выдвижная часть установлена с возможностью совершения строго направленного возвратно-поступательного перемещения на максимальную длину посредством гидродомкрата раздвижки относительно жесткого направляющего устройства, отличающаяся тем, что вспомогательная телескопически выдвижная часть рукояти выполнена в виде прямоугольной пустотелой призмы с взаимно параллельными гранями. Жесткое направляющее устройство выполнено в виде охватывающей прямоугольной призмы с параллельными гранями, составленной боковыми и задней поверхностями основной части рукояти и пластиной, закрепленной внутри нее на всю длину перемещения вспомогательной телескопически выдвижной части рукояти, причем гидродомкрат телескопической раздвижки рукояти размещен внутри вспомогательной телескопически выдвижной части.
Такое сочленение основной и вспомогательной телескопически выдвижной частями обеспечивает надежное сопряжение по всей длине телескопической раздвижки в процессе выемки грунта или выгрузки горной массы различной крупности.
Существенными отличиями являются:
1. Сопряжение между основной и вспомогательной телескопически выдвижной частями рукояти выполнено в виде двух прямоугольных пустотелых призм с взаимно параллельными гранями. При этом прямоугольная призма вспомогательной телескопически выдвижной части размещена внутри такой же призмы, но с другими размерами, смонтированной из части боковых и задней поверхностей основной части рукояти и жесткой пластиной, смонтированной внутри последней.
Такое сопряжение между основной и вспомогательной телескопически выдвижной частями обеспечивает строго направленное возвратно-поступательное перемещение вспомогательной телескопически выдвижной части при изменении длины рукояти, а также создает надежный контакт между ними для восприятия нагрузок от изгибающего и крутящего моментов, возникающих в процессе внедрения ковша в горную массу или грунт.
2. Телескопические перемещения и фиксация положения вспомогательной телескопически выдвижной части рукояти выполняется посредством гидродомкрата, смонтированного внутри нее. Такие перемещения необходимы при увеличении глубины (высоты) копания и при подъеме рабочего оборудования из котлована или уступа на отрытых горных работах. При этом такое размещение гидродомкрата обеспечивает максимальную раздвижность рукояти.
Сущность изобретения поясняется чертежами.
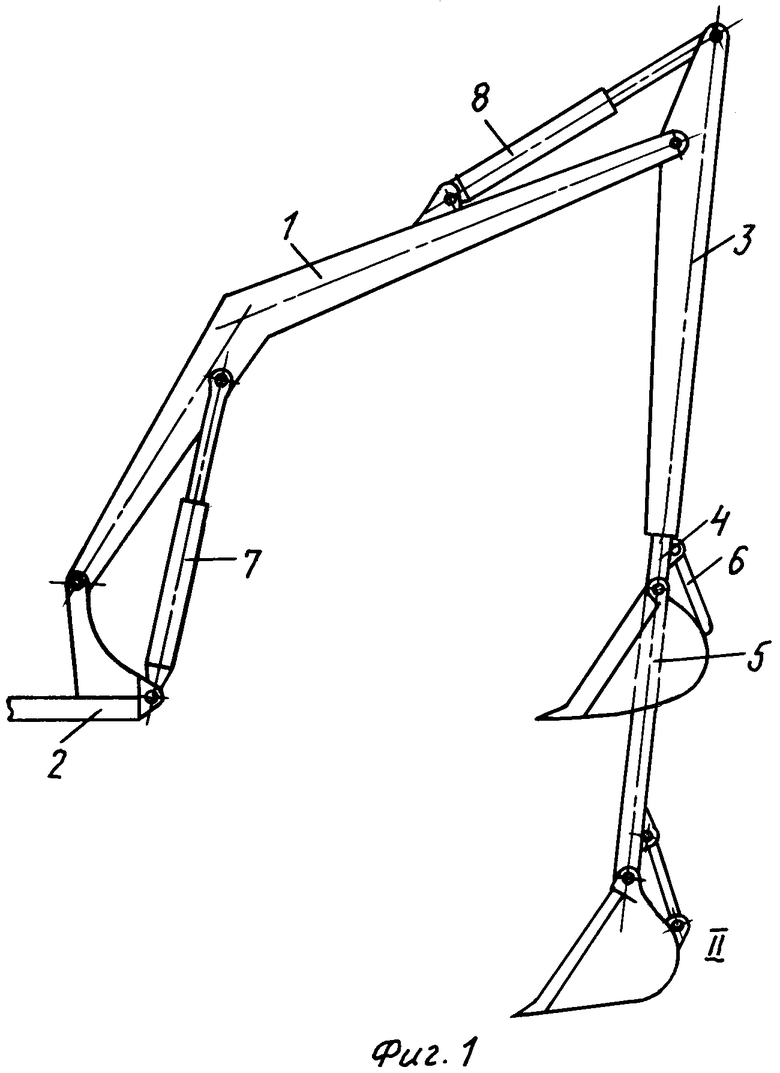
Фиг.1 - общая конструктивная схема рабочего оборудования обратной лопаты с телескопической рукоятью.
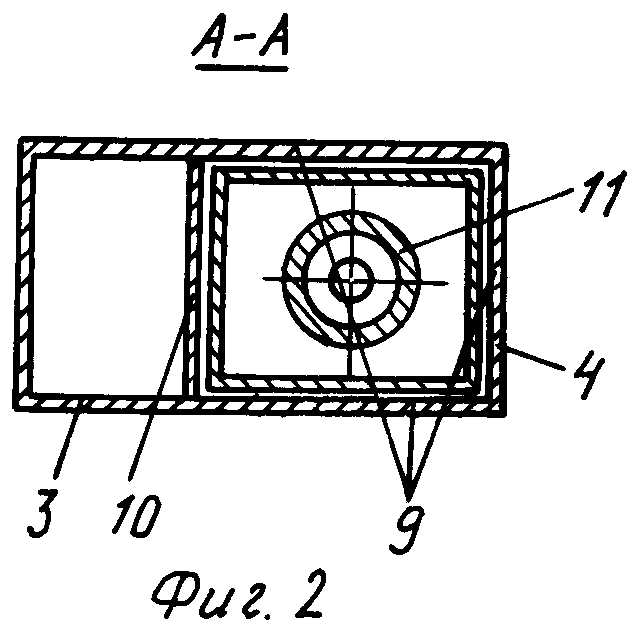
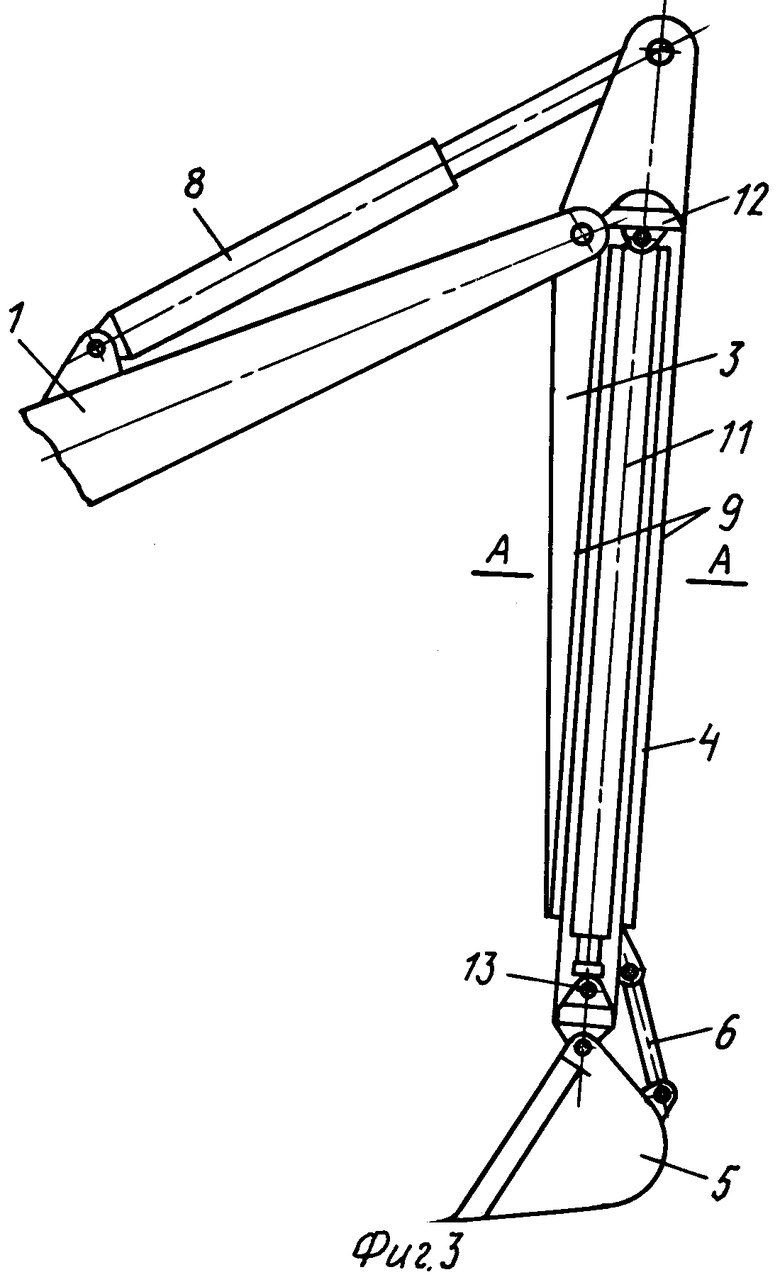
Фиг.2, 3 - конструктивная схема телескопической раздвижной рукояти обратной лопаты.
На фиг.1 представлена общая конструктивная схема рабочего оборудования обратной лопаты. Оно состоит из моноблочной изогнутой стрелы 1, смонтированной на поворотной платформе 2 экскаватора. На конце стрелы 1 шарнирно закреплена рукоять, состоящая из основной части 3 и вспомогательной телескопически выдвижной части 4. На внешнем конце вспомогательной телескопически выдвижной части 4 смонтирован ковш 5. Поворот стрелы 1 производится гидродомкратами 7, а поворот рукояти, состоящей из основной части 3 и вспомогательной телескопически выдвижной части 4, посредством гидродомкрата 8.
На фиг.2 представлена конструктивная схема телескопически раздвижной рукояти с продольным и поперечным сечениями. Телескопически раздвижная рукоять состоит из основной части 3 и вспомогательной телескопически выдвижной части 4. Внутри основной части 3 рукояти смонтировано жесткое направляющее устройство 9, представляющее собой прямоугольную призму, выполненную частично из боковых и задней граней (поверхностей), а также жесткой пластины 10, закрепленной внутри основной части 3 рукояти. Грани призмы взаимно параллельны. При этом длина жесткой пластины 10 равна величине перемещения вспомогательной части 4 рукояти.
Вспомогательная телескопически выдвижная часть 4 рукояти выполнена также в виде прямоугольной пустотелой призмы с взаимно параллельными гранями и размещена внутри охватывающей призмы 9 основной части рукояти 3. Внутри вспомогательной телескопически выдвижной пустотелой части 4 рукояти размещен гидродомкрат 11 раздвижки рукояти, который своим цилиндром при помощи шарнира 12 прикреплен к внутренней стороне основной части 3 рукояти, а его шток шарниром 13 связан с нижней внутренней стороной вспомогательной телескопически выдвижной части 4 рукояти. При этом оси шарниров 12 и 13 перпендикулярны продольной плоскости рукояти, что позволяет устранять изгибающие нагрузки на гидродомкрат 11 раздвижки рукояти при копании.
Сопряжение между двумя частями основной 3 и вспомогательной телескопически выдвижной 4 рукояти, выполненное в виде двух прямоугольных призм с параллельными гранями, размещенными одна в другой, позволяет иметь надежное сочленение между ними для восприятия нагрузок от изгибающего и крутящего моментов, возникающих при внедрении ковша 5 в грунт или горную массу.
Принцип работы предлагаемого рабочего оборудования следующий.
При рытье котлованов или при работе на уступах ниже стоянки экскаватора стрела 1 совместно со сдвинутой (положение I) рукоятью и ковшом 5 опускается вниз и при помощи напорных усилий гидродомкратов 7 и 8 осуществляется внедрение в породу или грунт ковша 5 с последующим движением рукояти с ковшом по часовой стрелке. После наполнения ковша производится подъем всего рабочего оборудования при помощи гидродомкратов 7. После этого следует поворот платформы 2 с рабочим оборудованием к месту разгрузки. Затем следует поворот рукояти с ковшом 5 в противоположную сторону от стрелы 1 при помощи гидродомкрата 8 с последующей разгрузкой в отвал или транспортное средство. Такой процесс по выемке продолжается на глубину (высоту) копания, практически равную длине вытянутых в одну линию стрелы 1 и рукояти.
Дальнейшее углубление осуществляется при телескопическом выдвижении вспомогательной части 4 рукояти с фиксированием выдвинутой части посредством гидродомкрата 11. После наполнения ковша 5 производится подъем рабочего оборудования при помощи гидродомкратов 7 с одновременным втягиванием вспомогательной телескопически выдвижной части 4 внутрь основной части 3 рукояти при помощи гидродомкрата 11. Выгрузка ковша 5 осуществляется вышеописанным способом. При необходимости процесс углубки может производиться до тех пор, пока вспомогательная телескопическая часть 4 не выдвинется на полную свою длину, ограниченную величиной хода поршня со штоком гидродомкрата 11 (положение II).
| название | год | авторы | номер документа |
|---|---|---|---|
| РАБОЧЕЕ ОБОРУДОВАНИЕ ОДНОКОВШОВЫХ ГИДРАВЛИЧЕСКИХ ЭКСКАВАТОРОВ | 2005 |
|
RU2310044C2 |
| РЫЧАЖНОЕ РАБОЧЕЕ ОБОРУДОВАНИЕ СТВОЛОВОЙ ПОГРУЗОЧНОЙ МАШИНЫ С УПРАВЛЯЕМЫМ ГРЕЙФЕРОМ | 2008 |
|
RU2380542C1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ПРЯМОЙ ИЛИ ОБРАТНОЙ ЛОПАТ ГИДРАВЛИЧЕСКИХ ОДНОКОВШОВЫХ ЭКСКАВАТОРОВ | 2003 |
|
RU2236510C1 |
| РЫЧАЖНОЕ РАБОЧЕЕ ОБОРУДОВАНИЕ СТВОЛОВОЙ ПОГРУЗОЧНОЙ МАШИНЫ С УПРАВЛЯЕМЫМ ГРЕЙФЕРОМ | 2008 |
|
RU2362878C1 |
| СТВОЛОВАЯ БУРОПОГРУЗОЧНАЯ УСТАНОВКА | 2010 |
|
RU2449127C1 |
| БУРОКРЕПЕЗАЧИСТНОЙ МОДУЛЬ | 1994 |
|
RU2079663C1 |
| СТВОЛОВАЯ БУРОПОГРУЗОЧНАЯ УСТАНОВКА | 2010 |
|
RU2426884C1 |
| СТВОЛОВАЯ ПОГРУЗОЧНАЯ МАШИНА | 2009 |
|
RU2418169C1 |
| СТВОЛОВАЯ ПОГРУЗОЧНАЯ МАШИНА С РЫЧАЖНЫМ РАБОЧИМ ОБОРУДОВАНИЕМ | 2008 |
|
RU2377408C1 |
| СТВОЛОВАЯ БУРОПОГРУЗОЧНАЯ УСТАНОВКА | 2011 |
|
RU2455489C1 |
Изобретение относится к горному и строительному делу. Рабочее оборудование обратной лопаты гидравлических одноковшовых экскаваторов включает изогнутую стрелу и связанную с ней шарнирно телескопически раздвижную рукоять, состоящую из основной и вспомогательной телескопически выдвижной частей с смонтированным на внешнем конце последней ковшом. Гидродомкраты для поворота стрелы и рукояти. Гидродомкрат телескопической раздвижки рукояти. Вспомогательная телескопически выдвижная часть установлена с возможностью совершения строго направленного возвратно-поступательного перемещения на максимальную длину посредством гидродомкрата раздвижки относительно жесткого направляющего устройства. Вспомогательная телескопически выдвижная часть рукояти выполнена в виде прямоугольной пустотелой призмы с взаимно параллельными гранями. Жесткое направляющее устройство выполнено в виде охватывающей прямоугольной призмы с параллельными гранями, составленной боковыми и задней поверхностями основной части рукояти и пластиной, закрепленной внутри нее на всю длину перемещения вспомогательной телескопически выдвижной части рукояти. Гидродомкрат телескопической раздвижки рукояти размещен внутри вспомогательной телескопически выдвижной части. Повышается надежность работы экскаватора. 3 ил.
Рабочее оборудование обратной лопаты гидравлических одноковшовых экскаваторов, включающее изогнутую стрелу и связанную с ней шарнирно телескопически раздвижную рукоять, состоящую из основной и вспомогательной телескопически выдвижной частей, со смонтированным на внешнем конце последней ковшом, гидродомкраты для поворота стрелы и рукояти, а также гидродомкрат телескопической раздвижки рукояти, причем вспомогательная телескопически выдвижная часть установлена с возможностью совершения строго направленного возвратно-поступательного перемещения на максимальную длину посредством гидродомкрата раздвижки относительно жесткого направляющего устройства, отличающееся тем, что вспомогательная телескопически выдвижная часть рукояти выполнена в виде прямоугольной пустотелой призмы с взаимно параллельными гранями, а жесткое направляющее устройство выполнено в виде охватывающей прямоугольной призмы с параллельными гранями, составленной боковыми и задней поверхностями основной части рукояти и пластиной, закрепленной внутри нее на всю длину перемещения вспомогательной телескопически выдвижной части рукояти, причем гидродомкрат телескопической раздвижки рукояти размещен внутри вспомогательной телескопически выдвижной части.
| РУЧНОЙ ВИНТОРЕЗНЫЙ СТАНОК | 1929 |
|
SU20917A1 |

