Известны преобразователи механического перемещения, например кромки щупа в пневматический сигнал, содержащие корпус, питающее и приемное сопла и индикаторное устройство.
Предложенный преобразователь отличается от известных тем, что с целью повышения быстродействия, в нем питающее и приемное сопла выполнены в скобе, подвижно соединенной с корпусом и взаимодействующей с электромагпитом, причем приемное сопло соединено с управляющим каналом струйного реле.
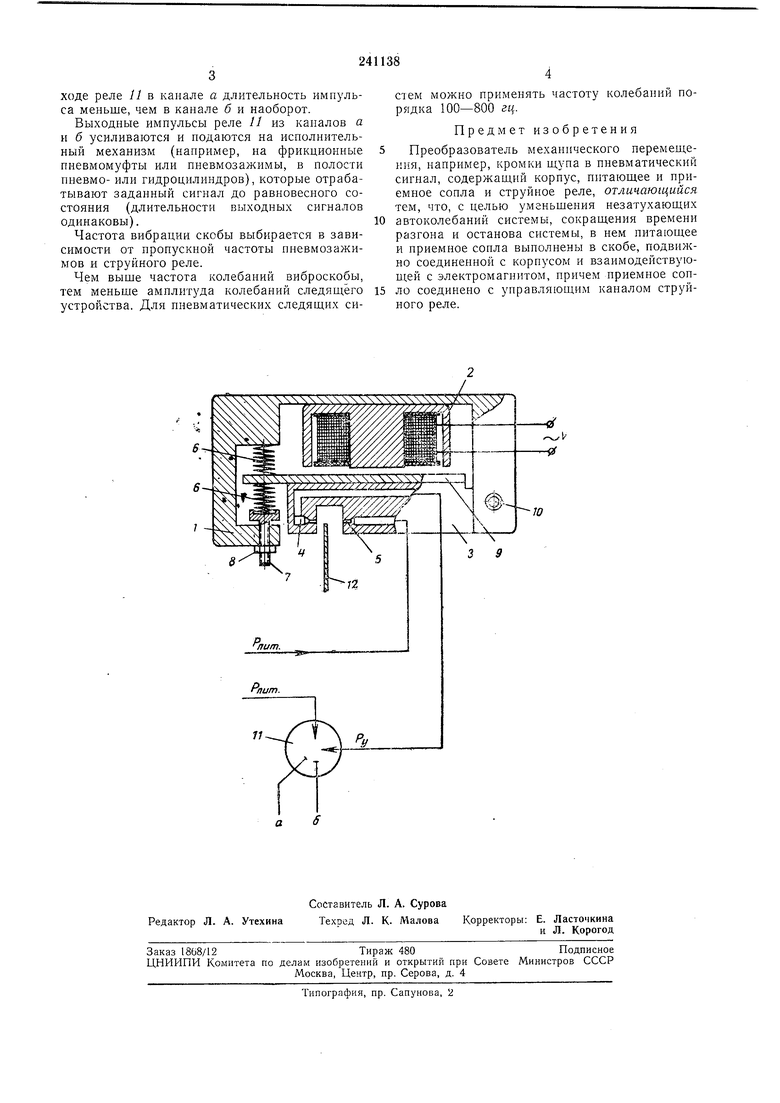
На чертеже показан преобразователь механических перемещений.
Преобразователь содержит корпус /, электромагнит 2, виброскобу 3 с приемным 4 и питающим 5 соплами, пружины 6, регулировочный винт 7, контргайку 8, якорь 9, ось Ю vi струйное реле 11.
Преобразователь работает следующим образом.
Питание электромагнита 2 включается переменным током. Питание сжатого воздуха Япит подается к соплу 5 виброскобы и к реле )/.
Если щуп 12 пе входит в зону потока струи воздуха, вытекающей из сопла 5, то в соплей наводится управляющий сигнал Ру постоянной величины i переключает силовой поток
в реле 11 из канала б в канал а. Таким образом, при отсутствии возмущения на входе выходной сигнал постоянно будет в канале а реле п.
Если щуп полностью перекрывает поток
струи, вытекающий из сопла 5, то в сопле 4 давленпе Ру равпо О и поток струйного реле направляется в канал б и будет там до тех пор, пока кромка щупа не переместптся в зону потока.
Если щуп переместить в зону потока так, чтобы его кромка находилась в центре амплитуды колебаний оси сопел 4 и 5, то на выходе реле // в каналах о и б возникают пульсирующие имиульсы, равные по длительности друг
другу, частота которь х равна частоте колебания виброскобы.
Если перемещать кромку щупа относительно центра колебаний оси сопел вверх или вниз, то длительность импульсов в выходных каналах а и б реле // относительно друг друга изменяется. Так, если кромку щупа поместить выше центра колебаний оси сопел 4 и 5, то , в течение которого наводится давление в сопле 4, меньше, чем 1время, в течение котоходе реле 11 в канале а длительность импульса меньше, чем в канале б и наоборот.
Выходные импульсы реле 11 из каиалов а и б усиливаются и подаются на исполнительный механизм (например, на фрикционные пневмомуфты или пневмозажимы, в полости пневмо- или гидроцилиндров), которые отрабатывают заданный сигнал до равновесного состояния (длительности выходных сигналов одинаковы).
Частота вибрации скобы выбирается в зависимости от нропускной частоты пневмозажимов и струйного реле.
Чем выше частота колебаний виброскобы, тем меньше амнлитуда колебаний следящего устройства. Для нневматических следящих систем можно применять частоту колебаний порядка 100-800 гц.
Предмет изобретения
Преобразователь механического перемещения, например, кромки щупа в пневматический сигнал, содержащий корпус, питающее и приемное сопла и струйное реле, отличающийся тем, что, с целью уменьшения незатухающих автоколебаний системы, сокращения времени разгона и останова системы, в нем питающее и приемное сопла выполнены в скобе, подвижно соединенной с корпусом и взаимодействующей с электромагнитом, причем приемное сопло соединено с управляющим каналом струйного реле.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для взвешивания | 1977 |
|
SU711371A1 |
| Следящий привод | 1976 |
|
SU636423A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКОЕ УСТРОЙСТВО УПРАВЛЕНИЯ | 1991 |
|
RU2010108C1 |
| Гидравлический следящий привод | 1977 |
|
SU696184A1 |
| Пневматический датчик положения | 1980 |
|
SU934064A1 |
| СТРУЙНЫЙ ИЗМЕРИТЕЛЬ СКОРОСТИ ТЕЧЕНИЯ ЖИДКОСТИ ИЛИ ГАЗА | 2002 |
|
RU2277224C2 |
| СЧЕТЧИК-РАСХОДОМЕР ГАЗА | 2011 |
|
RU2492426C1 |
| Струйный усилитель | 1990 |
|
SU1701997A1 |
| Струйный датчик расхода | 1977 |
|
SU857714A1 |
| Пневмоакустический преобразователь положения | 1979 |
|
SU773550A1 |
