1
Изобретение относится к машиностроению, например к станкостроению, и может быть использовано при обработке деталей по копиру с помощью гадравлического следящего привода, например, на токарных станках.
Известен гидравлический следящий привод, содержащий корпус и расположенные в нем струйную трубку и приемные сопла, сообщенные с соответствующими полостями гидродвигателя 1.
Основным недостатком этого привода является больщая величина ощибки по нагрузке. Если к исполнительному органу привода прикладывается внешняя нагрузка, то требуется дополнительное рассогласование, необходимое для создания в полостях шдродилиндра дополнительного перепада давлений, достаточного для уравновешивания нагрузки. Установившаяся величина этого рассогласования является ошибкой следящего привода по нагрузке и характеризует : его гидравлическую жесткость.
Целью изобретения является расширение функциональных возможностей гидравлического следящего привода. Поставленная цель достига, ется тем, что в корпусе на упругих мембранах установлен подвижный элемент, образующий с ним управляющие камеры, а приемные comia выполнены в последнем и сообщены с соответствующими полостями гидродвигателя через управляющие камеры.
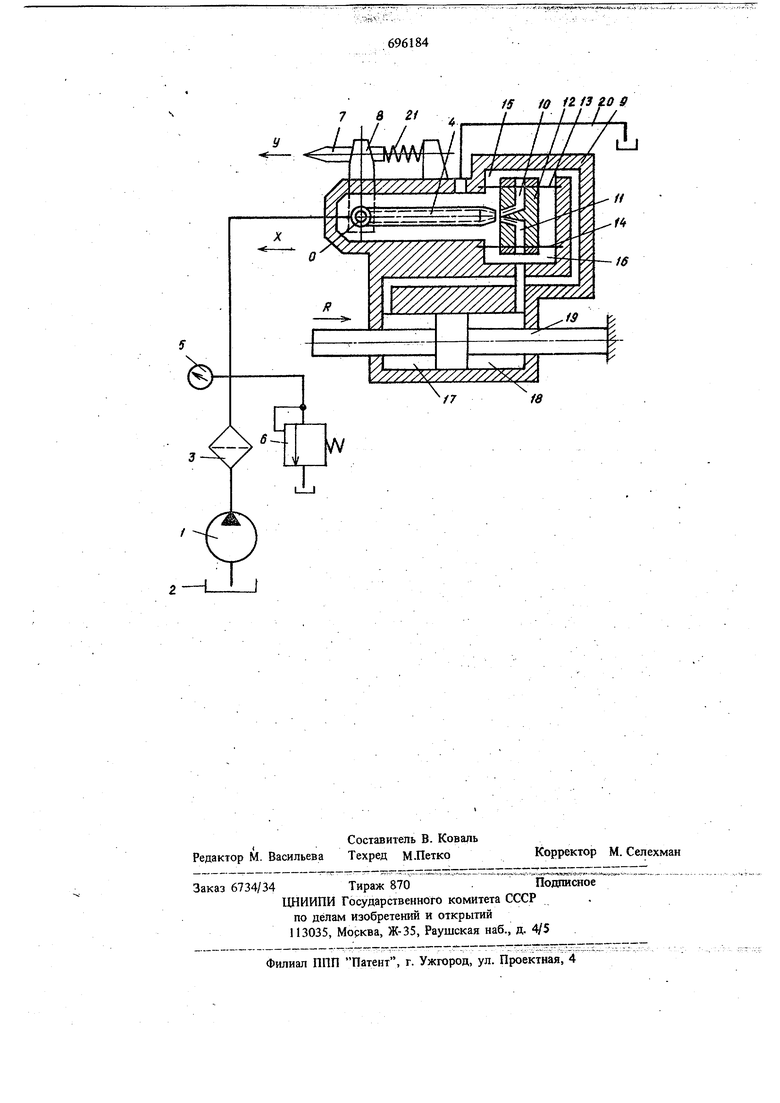
На чертеже изображена конструктивная схема гидравлического следящего привода.
Рабочая жидкость подается насосом 1 постоянной производительности из бака 2 через фильтр 3 и под постоянным давлением нагнетается в струйную трубку 4. Давление питания измеряется по манометру 5 и определяется настройкой переливного клапана 6, а при его полном закрь1тии - потерями давления в магистрали от насоса до нагнетательного comia струйной трубки 4. Управляющий сигиал подается на щуп 7, закрепленный на рычаге 8, которьт жестко связан со струйной трубкой 4. Ось О поворота струйной трубки 4 шарнирно опирается на корпус 9 исполнительного органа. Струйная трубка 4 имеет возможность поворачиваться на небольшие углы в обе стороны вокруг Оси, перпендикулярной к плоскости чертежа. Приемные соп° 69 и 11 выполнены в подвижном элементе 12, установленном в корпусе 9 на упругих мембранах 13 и 14. Подвнжный элемент 12 образует с корпусом 9 управляющие камеры 15 и 16. Приемные сопла Юн 11 соединены череэ управляющие камеры 15 и 16с соответствующими полостями 17 и 18 гидродвигателя 19. Внут.реннее пространстро корпуса 9 соединено со сливом магистралью 20. Пружина 21 постоянно, прижимает щуп 7 к какому-либо задающему устройству, например копиру. Работает гидравлический следящий привод следующим образом. Струя рабочей жидкости, вытекающая из нагнетательного сопла струйной трубки 4, имеет определенный запас кинетической энергии. При торможении жидкрСти в приемных соплах 10 или 11 кинетическая энергия переходит в потенциалы1ую энергию давления. Когда струйная трубка 4 занимает среднее положение относительно приемных сопел 10 и 11, энергия струи, вытекающей из нагнетательного СоплаГраЁгГОмерно распределяется между приемными соплами 10 и 11, при этом давления в полостях 17 и 18 гидродвигателя 19 и в управляющих камерах 15 и 16 оказываются одинаковыми. Смещение струйной трубки 4 из среднего положения приводит к врзтшкнойению перепада давлений в приемных соплах 10 и 11. Под действием перепада давлений приемные сопла 10 и 11 смещаются на некоторую величину, что вызы вает дополнительное приращение перепада давлений. Суммарный перепад давлений вызьгвает движение исполнительного органа или накопление им потенщ альной энергии. Поворот струйной трубки 4 происходит ПРИ неравенстве управляющего .сигнала Y и координаты X исполнительного органа. Приемные сопла связаны с полостями 17 и 18 гидро двигателя 19 таким образом, что возникающий в них при повороте струйной трубки 4 перепад давлений всегда стремится сдвинуть исполнительный орган в направлении управляющего сигнала. При .таком движении ось поворота струйной трубки 4, перемещаясь вместе с исполнительным органом, стремится вернуть трубку 4 в среднее положение. Таким образом в приводе осуществляется жесГкая обратная связь, при которой регулируемая переменная, то есть координата X исполнительного органа, сравнивается с величиной управляющего сигнала Y, и на работу исполнительного механизма влияет лищь их разность. Если,к исполнительному органу приклады.вается нагрузка (силы резания, трения, инерщии вижупихся частей и др), то для ее компенсирования создается дополнительный перепад давения в полостях 17 и 18 гидро двигателя 19, но не за счет рассогласования, а из-за смещения подвижного элемента 12, и соответственно приемных сопел 10 и 11. Величина этого смещения прямо пропорциональна перепаду давлений (то есть величине нагрузки) и обратно пропорциональна жесткости мембран 13 и 14. Благодаря этому в приводе осуществляется дополнительная обратная связь по нагрузке, функционирующая от сигнала, вырабатываемого самой системой при ее нагружении. Обратная связь по нагрузке перераспределяет энергию струи, вытекающей из струйной трубки 4, между приемными соплами 10 и 11. Чем больще нагрузка, тем больще смещение подвижного элемента 12, что ведет к получению больщего перепада давлений в полостях гидро двигателя 19 и наоборот. При соответствующем выборе жесткости упругих мем- брав 13 и 14 привод будет скомпенсирован по нагрузке. Положительным эффектом является повыще- ние точности, поскольку увеличивается жесткость по нагрузке и снижается зона нечувствительности следящего привода. Повыщается также и коэффициент полезного действия, так как при тех же затратах подводимой мощности, что и в известной конструкции, привод способен развивать больщее тяговое усилие. Формула изобретения Гидравлический следящий привод, содержащий корпус и расположенные в нем струйную трубку и приемные сопла, сообщенньге с соответствующими полостями гидро двигателя, о тличающийся тем, что, с целью расщирения функциональных возможностей привода, в корпусе на упругих мембранах установлен подвижный элемент, образующий с ним управ лягоЩие камеры, а приемные сопла выполнены в последнем и сообщены с соответствующими ггрлостями гидродвигателя через управляющие камеры. Источники информации, принятые во внимание йри экспертизе Л.Крамской Э. Hi Гидравлические следящие приводы со струйными усилителями. Л., Мапшностроение, 1972, с. 7, рис. 2. iS в 21 iO 1H3 iO 9 I / / / Z/yi
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1998 |
|
RU2153104C1 |
| Следящий привод | 1976 |
|
SU636423A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1998 |
|
RU2150614C1 |
| ПНЕВМОГИДРАВЛИЧЕСКАЯ СТРУЙНАЯ ЦИФРОВАЯ | 1967 |
|
SU205102A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1996 |
|
RU2116524C1 |
| Следящий привод | 1976 |
|
SU635296A1 |
| Гидравлический усилитель | 1979 |
|
SU787740A1 |
| Устройство для автоматической ориентации рабочего инструмента по краю материала | 1972 |
|
SU476869A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1997 |
|
RU2125667C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД ДРОССЕЛЬНОГО РЕГУЛИРОВАНИЯ | 2007 |
|
RU2347949C1 |