Известен способ компенсации скоростной погрешности асинхронных тахогенераторов в устройствах автоматики компенсационного типа, основанный на применении дополнительных компенсирующих обмоток.
Известному способу присуща достаточно большая скоростная погрешность.
Предложенный способ отличается от известных тем, что в процессе компенсации преобразуют задающее напряжение в компенсирующий магнитный поток, направляемый встречно магнитному потоку реакции ротора, измеряют создаваемую разностным потоком величину э.д.с. на генераторной обмотке, при равенстве нулю которой фиксируют момент компенсации.
Это позволяет расширить диапазон скоростей вращения при сохранении строго линейной зависимости между скоростью вращения и задающим напряжением.
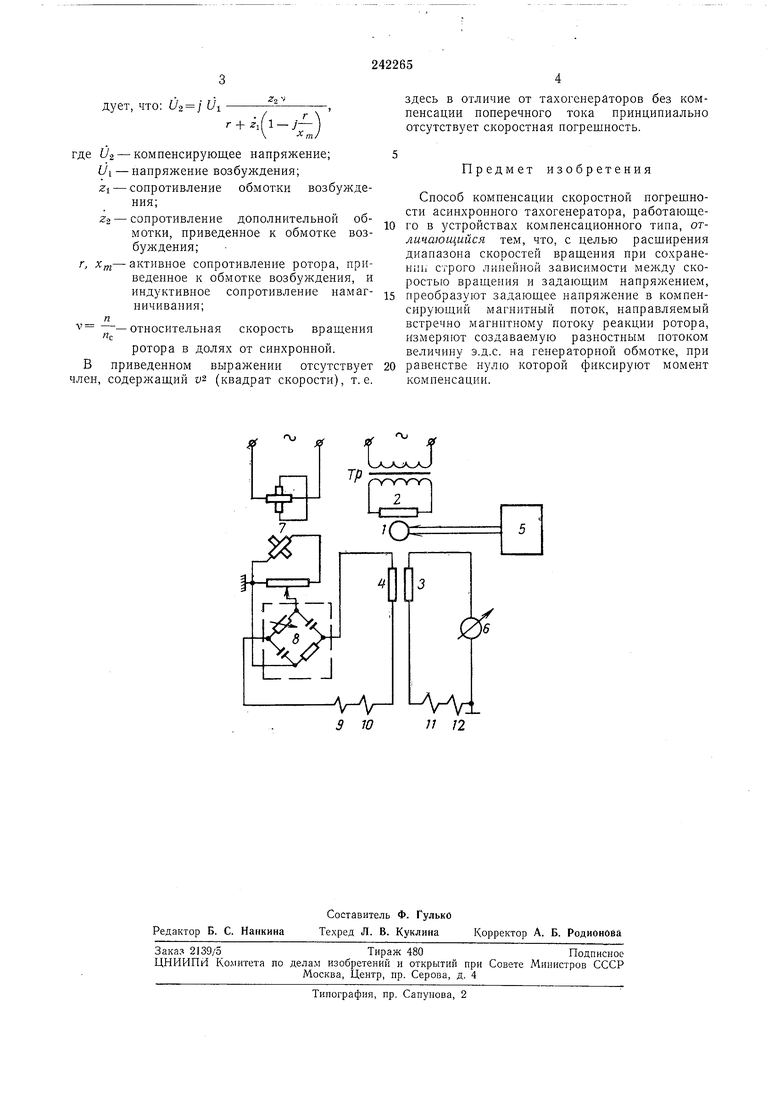
На чертеже приведена схема испытания асинхронного тахогенератора, которая является одной из возможных схем реализации предлагаемого способа.
Схема включает асинхронный тахогенератор 1 с обмоткой возбуждения 2 н расположенными по поперечной оси генераторной обмоткой 3 н дополнительной обмоткой 4, привод 5 стабилизированной скорости вращения вала тахогенератора, нуль-индикатор 6 фиксированной частоты, масштабный вращающийся трансформатор 7, фазирующее устройство 8 и компенсирующие устройства 9-12.
Для устранения скоростной погрешности в качестве выходной величины асинхронного тахогенератора используется не э.д.с. генераторной обмотки, а намагничивающая сила реакции ротора, создающая поток Ф по оси генераторной обмотки 3, в качестве компенсирующей величины - намагничивающая сила дополнительной обмотки 4, расположенной но поперечной оси и возбуждаемой от источника компенсирующего напряжения.
Намагничивающая сила дополнительной обмотки 4 действует встречно намагничивающей силе реакции ротора, при этом сравнение производится по величине результирующего поперечного магнитного потока.
При компенсации магнитный поток по поперечной оси отсутствует, вследствие чего устраняется его влияние на продольный поток Ф. Э.д.с. генераторной обмотки 3 при этом равна нулю.
Поскольку при компенсации магнитный поток по поперечной оси отсутствует, то зависимость между компенсирующим напряжением и угловой скоростью вращения ротора оказывается принципиально линейной.
2дует, что: t/2 / i
r + zAl - j
де IJ.2 - компенсирующее напряжение; IJi - напряжение возбуждения; Zi - сопротивление обмотки возбуждения;
Z2 - сопротивление дополнительной обмотки, приведенное к обмотке возбуждения;
г, Хщ-активное сопротивление ротора, приведенное к обмотке возбуждения, и индуктивное сопротивление намагничивания;л v --относительная скорость вращения
«с
ротора в долях от синхронной. В приведенном выражении отсутствует лен, содержащий v (квадрат скорости), т.е.
здесь в отличие от тахогенераторов без компенсации поперечного тока принципиально отсутствует скоростная погрещность.
Предмет изобретения
Способ компенсации скоростной ногрешности асинхронного тахогенератора, работающего в устройствах компенсационного типа, отличающийся тем, что, с целью расширения диапазопа скоростей вращения при сохранеHiiii строго лк1 ейной зависимости меладу скоростью вращения и задающим напряжением,
преобразуют задающее напряжение в компенсирующий магнитный поток, направляемый встречно магнитному потоку реакции ротора, измеряют создаваемую разностным потоком величину э.д.с. на генераторной обмотке, при
равенстве нулю которой фиксируют момент компенсации.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЕНСАЦИОННЫЙ ИЗМЕРИТЕЛЬ СКОРОСТИ ВРАЩЕНИЯ | 1970 |
|
SU276546A1 |
| КОМПЕНСАЦИОННЫЙ ИЗМЕРИТЕЛЬ СКОРОСТИ ВРАЩЕНИЯ | 1970 |
|
SU288432A1 |
| Асинхронный тахогенератор | 1980 |
|
SU898564A1 |
| Асинхронный тахогенератор | 1985 |
|
SU1390726A1 |
| АСИНХРОННЫЙ ТАХОГЕНЕРАТОР С ПОЛЫМ РОТОРОМ | 1968 |
|
SU211889A1 |
| ДВУХФАЗНЫЙ АСИНХРОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1973 |
|
SU399032A1 |
| Автоматический потенциометр | 1940 |
|
SU65604A1 |
| Сварочный одноякорный преобразователь, переменного тока в постоянный | 1955 |
|
SU108886A1 |
| АКСЕЛЕРОМЕТР-ТАХОГЕНЕРАТОР | 2015 |
|
RU2584576C1 |
| ОДНОЯКОРНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 1947 |
|
SU74679A1 |
-VAH Wi
3 W
.J
/7 /2
