113907
Изобретение относится к области электрических микромашин автоматических устройств, в частности, к асинхронным тахогенераторам с полым немагнитным ротором, используе-- ,мым в компенсационных схемах интегрирующего привода.
fi - частота сети; А и В комплексные коэффициенты, не зависящие от скорости.
7 7 7
А /1 R ч . в-
А (1+) П+V
7. л( - 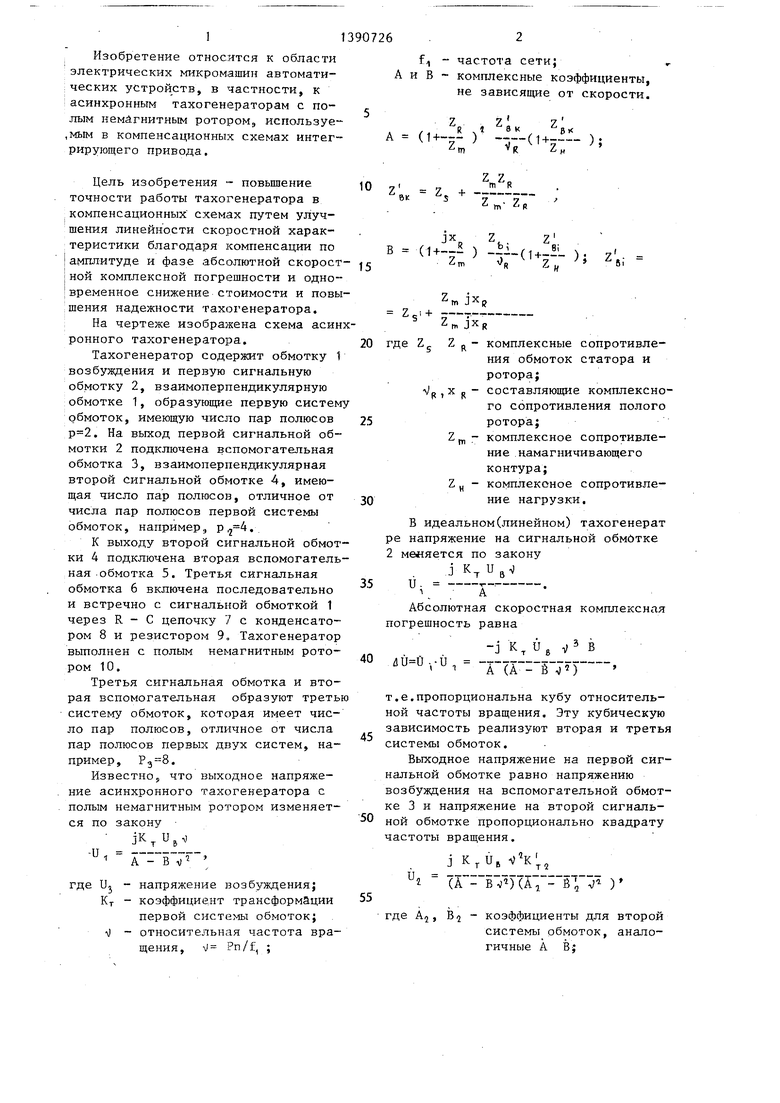
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЕНСАЦИОННЫЙ ИЗМЕРИТЕЛЬ СКОРОСТИ ВРАЩЕНИЯ | 1970 |
|
SU288432A1 |
| АЯ БИБЛИОТЕКА | 1970 |
|
SU261543A1 |
| Асинхронный тахогенератор | 1980 |
|
SU898564A1 |
| Устройство контроля узлов вращающихся трансформаторов | 1977 |
|
SU771575A1 |
| РЕВЕРСИВНЫЙ БЕСКОНТАКТНЫЙ ТАХОГЕНЕРАТОР ПОСТОЯННОГО ТОКА | 1965 |
|
SU173485A1 |
| СПОСОБ КОМПЕНСАЦИИ СКОРОСТНОЙ ПОГРЕШНОСТИ АСИНХРОННОГО ТАХОГЕНЕРАТОРА | 1969 |
|
SU242265A1 |
| Асинхронный тахогенератор | 1986 |
|
SU1403265A1 |
| ЭЛЕКТРОПРИВОД КОЛЕБАТЕЛЬНОГО ДВИЖЕНИЯ | 2009 |
|
RU2401503C1 |
| Датчик угловой скорости | 1984 |
|
SU1200180A1 |
| Регулируемый двухфазный асинхронный двигатель | 1954 |
|
SU112791A1 |
Цель изобретения - повышение точности работы тахогенератора в компенсационных схемах путем улучшения линейности скоростной характеристики благодаря компенсации по амплитуде и фазе абсолютной скоростной комплексной погрешности и одновременное снижение стоимости и повышения надежности тахогенератора.
На чертеже изображена схема асинхронного тахогенератора,
Тахогенератор содержит обмотку 1 возбуждения и первую сигнальную обмотку 2, взаимоперпендикулярную обмотке 1, образуюище первую систему обмоток, имеющую число пар полюсов . На выход первой сигнальной обмотки 2 подключена вспомогательная обмотка 3, взаимоперпендикулярная второй сигнальной обмотке 4, имеющая число пар полюсов, отличное от числа пар полюсов первой системы обмоток, например,, р,.
К выходу второй сигнальной обмотки 4 подключена вторая вспомогательная обмотка 5. Третья сигнальная обмотка 6 включена последовательно и встречно с сигнальной обмоткой 1 через R - С цепочку 7 с конденсатором 8 и резистором 9. Тахогенератор выполнен с полым немагнитным ротором 10.
Третья сигнальная обмотка и вторая вспомогательная образуют третью систему обмоток, которая имеет чиспар полюсов первых двух систем, например, Рз-8.
Известно, что выходное напряжение асинхронного тахогенератора с полым немагнитным ротором изменяется по закону
,.
А -
где Uj - напряжение возбуждения; Кт - коэффициент трансформации первой системы обмоток; . ) - относительная частота вращения, V Pn/t, ;
10
ZBK Z +
15
в;
где Z Z д- комплексные сопротивления обмоток статора и ротора;
Vo,X о составляющие комплексно- 1 (
го сопротивления полого ротора;
Z - комплексное сопротивление намагничивающего контура;
Z ц - комплексное сопротивление нагрузки.
В идеальном(линейном) тахогенерат ре напряжение на сигнальной обмОтке 2 меляется по закону
J ,
.
Абсолютная скоростная комплексная погрешность равна
-J К, Ug v в .-и, -j-(A-i-6 4
т.е.пропорциональна кубу относительной частоты вращения. Эту кубическую зависимость реализуют вторая и третья системы обмоток.
Выходное напряжение на первой сигнальной обмотке равно напряжению возбуждения на вспомогательной обмотке 3 и напряжение на второй сигнальной обмотке пропорционально квадрату частоты вращения.
и.
j К, UB V K
и„
TQ
i (А - В)( 5; V )
где Aj, В 7 - коэффициенты для второй системы обмоток, аналогичные А Bj
в , fe,p
т1 расчетный коэффициент
трансформации; KY - коэффициент трансформации второй системы с обмоток; - расчетный коэффициент
второй системы обмоток. Это напряжение является напряжением возбуждения на обмотке 5 третьейю системы обмоток. Тогда напряжение на третьей сигнальной обмотке, напряжение компенсации, равно
.
V к;,
К
тэ
п- )((Аз - B;V )
о - и в 5 - В
где А,, БЗ - коэффициенты для третьей системы обмоток, аналогичные А и В, К-гэ Рз Ктз,
р ;
- коэффициент трансформации третьей системы обмоток.
Все три системы обмоток расположены в пазах статора и внутреннего сердечника. Вследствие того, что все они имеют четное число пар полюсов, то при ненасыщенной магнитной цепи они между собой не взаимодействуют, их можно рассматривать независимо друг от друга.
С точностью до десятых.долей процента величину компенсационного на
пряжения л UK можно представить в виде
, j К, Ugv K;,.K;V . -(,
Сравнивая U или приходим к заключению, что для полной компенсации R - С цепочка должна обеспечивать сдвиг напряжений по фазе на величину
V arg-| -arg 4- .
Коэффициент трансформации KTJ (при принятом к 1), обеспечивающий компенсацию абсолютной скоростной погрешности по амплитуде найдем из соотношения
К
гг
А, Aj I А I .
По фазовому углу рассчитываются известными методами величины сопротивления фазосдвиганяцей цепочки, при выбранной величине конденсатора 8. В тахогенераторе (фазовый сдвиг выходного напряжения соответствует фазовому сдвигу задающих элементов компенсационной схемы, так как нет компенсации поперечного потока ротора.
7 771
-г
| ТАХОГЕНЕРАТОР ПЕРЕМЕННОГО ТОКА | 0 |
|
SU264522A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Тахогенератор переменного тока | 1977 |
|
SU645083A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
