Известны устройства для контроля радиуса желоба кольца шарикоподшипника, содержаш;ие ш,уп для последовательного обхода поверхности желоба, индикатор, стойку для установки кольца при контроле. Измерение величины радиуса лселоба на известных приборах производится вручную, а результат отсчета по индикатору с помощью известных уравнений или графиков преобразуется в чнслепное значение проверяемого радиуса.
Предлагаемое устройство отличается от известных тем, что оно снабжено плоским пружинным параллелограммом, на свободной стороне которого закреплена поворотная в плоскости параллелограмма рамка, несуш,ая щуп, установленным под параллелограммом зеркалом, поворотном в той же плоскости, что и рамка; осветителем, световой поток которого направлен на зеркало; передающей телевизионной трубкой для преобразования падающегона нее отраженного от зеркала светового потока в электрический сигнал; растром, установленным между зеркалом и телевизионной трубкой, для компенсации систематической (Погрешности метода контроля и преобразования непрерывного светового потока в дискретный; электронно-логическим блоком для преобразования электрических сигналов в исполнительные команды; исполнительным органом для фиксации командных исполнительных команд; приводом для синхронного поворота растра и щупа; закрепленной на стойке плоской ножевой опорой, на которую желобом опирается контролируемое кольцо. Используемый в устройстве растр выполнен в виде диска из прозрачного материала с нанесенными на его плоскости непрозрачными для света линиями, выполненными в соответствии с функциональной зависимостью между вертикальными
и угловыми перемещениями щупа. Привод выполнен в виде электродвигателя с редуктором, кинематически связанного с ним вала, на котором жестко закреплен растр и профильпый кулачок, взаимодействующий со штоком, кинематически связанным с щупом. Ширина плоской ножевой опоры рассчитана по формуле;
b sin а,
где b - ширина плоской ножевой опоры; / - номинальная величина проверяемого радиуса;
2а - угол между точками контакта желоба кольца с плоской опорой. Это отличие позволяет автоматизировать контроль радиуса профиля желоба колец шарикоподщипников и, следовательно, повысить производительность и точность контроля. Благодаря высокой производительности предлагаемого устройства эффективность его применения на участках спецподшипников, где необходим стопроцентный контроль, окажется весьма высокой. Кроме того, объективность контроля позволит исключить влияние субъективных факторов на результат контроля.
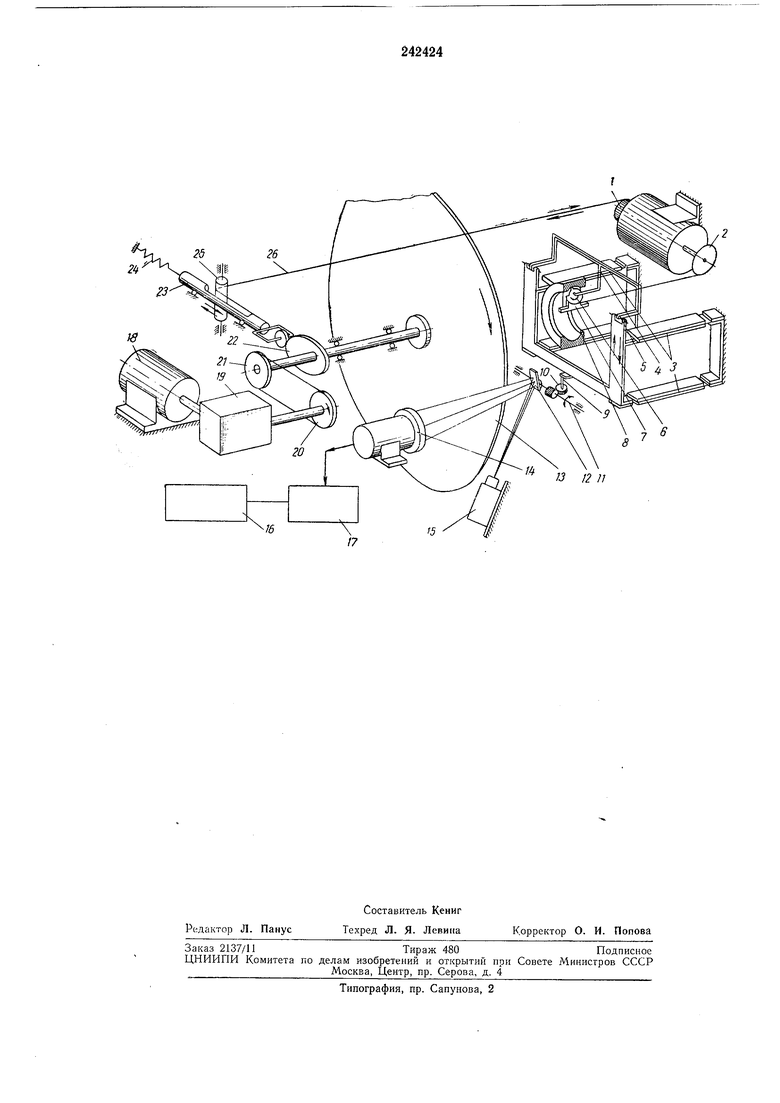
На чертеже изображена кинематическая схема устройства коитроля.
Оно содержит приводные шкивы / и 2, плоский пружинный параллелограмм 3, легкую поворотную рамку 4, которая поворачиваться на осях 5. На рамке 4 жестко закреплен щуп 6. На плоской ножевой опоре 7 соответствующим образом устанавливается контролируемое кольцо 8. При последовательном обходе щупом 6 поверхности желоба кольца 5 щуп, в общем случае, получит вертикальные перемещения, которые через рамку 4 и стержень 9, закрепленный на параллелограмме 3, будут переданы на механическое плечо 10, поворачивающее относительно оси // зеркало 12. Растр 13 располагается между зеркалом 12 и телевизионной трубкой 14. Пучок света, формируемый осветителем 15, после отражения от зеркала 12 падает на растр 13 и затем на телевизионную трубку 14.
Вследствие того, что растр представляет из себя совокупность непрозрачных линий, нанесенных на плоскости прозрачного диска, световой поток, падающий на его поверхность, прерывается в местах расположения непрозрачных линий. Следовательно, на светочувствительную поверхность передающей телевизионной трубки 14 спроектируется прерывистый (дискретный) световой поток.
В результате сканирования электронного луча телевизионной трубки на ее выходе образуются импульсы напрял ения, число которых определяется количеством засвеченных линий растра, что прямо связано с фактической величиной радиуса желоба контролируемого кольца. Результат контроля фиксируется исполнительным органом 16 после соответствующей обработки электрических импульсов напряжения в электронно-логическом блоке 17. Привод синхронного вращения щупа 6 и растра 13 состоит из электродвигателя 18, редуктора 19, шкивов 20 и 21, профильного кулачка 22, толкателя 23, возвратной пружины 24, валика , служащего для натяжения ленты 26, осуществляющей преобразовайие поступательного перемещения толкателя 23 в поворотное движение рамки 4 с щупом в посредством шкивов / и 2 и приводной нити, связывающей шкив 2 с щупом 6.
Описанный привод позволяет при повороте растра на 180° совершить рамке 4 со щупом 6 два поворота по 90°. Таким образом, при повороте растра на 180° щуп последовательно два раза обойдет желоб в одном и том же сечении.
- Совокупность линий, образующих растр, получена на основании следующей функциональной зависимости:
-Ь / Rl - RZ . sin2(p - 1/ Rl - R
.
где .sr-величина вертикального смещения щупа; RX-радиус желоба контролируемого
кольца; R - длина щупа; ф - угол поворота, щупа от вертикали; а - угол, определяющий ширину базы.
Функциональная зависимость получена в результате исследования схемы расположения
профиля желоба проверяемого кольца и плоской ножевой опоры.
Предмет изобретения
L Устройство для контроля радиуса желоба кольца шарикоподшипника, содержащее щуп для последовательного обхода поверхности желоба и стойку для установки контролируемого кольца, отличающееся тем, что, с целью
автоматизации контроля, оно снабжено плоским пружинным параллелограммом, на свободной стороне которого закреплена поворотная в плоскости параллелограмма рамка, несущая щуп; установленным под параллелограммом зеркалом, поворотном в той же плоскости, что и рамка; осветителем, световой поток которого направлен на зеркало; передающей телевизионной трубкой для преобразования падающего на нее отраженного от зеркала светового потока в электрический сигнал; растром, установленным между зеркалом и телевизионной трубкой, для компенсации систематической погрешности метода контроля и преобразования непрерывного светового потока в дискретный; электронно-логическим блоком для преобразования электрических сигналов в исполнительные команды; исполнительным органом для фиксации исполнительных команд; приводом для синхронного
поворота растра и щупа; закрепленной на стойке плоской ножевой опорой, на которую желобом опирается контролируемое кольцо.
2. Устройство по п. 1, отличающееся тем, что растр выполнен в виде диска из прозрачного материала с нанесенными на его плоскости непрозрачными для света линиями, выполненными в соответствии с функциональной зависимостью между вертикальными и угловыми перемещениями щупа.
3. Устройство по п. 1, отличающееся тем, что привод выполнен в виде электродвигателя с редуктором, кинематически связанного с ним вала, на котором жестко закреплен растр и профильный кулачок, взаимодействующий со
штоком, кинематически связанным с щупом.
4. Устройство по п. 1, отличающееся тем, что ширина плоской ножевой опоры рассчитана по формуле:
b 2-R
sm а,
где R -номинальная величина проверяемого
радиуса;