Изобретение относится к области гидроакустики и может быть использовано для построения систем автоматического обнаружения эхосигналов, принятых гидролокатором на фоне шумовой и реверберационной помехи и измерения параметров объекта при использовании псевдошумовых сигналов.
Известен способ обнаружения эхосигнала, рассмотренный в книге Л. Рабинер, Б. Гоулд «Теория и применение цифровой обработки сигналов», Мир, Москва, 1978 г. Способ содержит излучение зондирующего сигнала длительностью Т на известной частоте; прием эхосигнала; дискретизацию входного сигнала, набор входных дискретизированных отсчетов длительностью Т; определение энергетического спектра с помощью быстрого преобразования Фурье (БПФ), сдвиг набора входного сигнала по времени, многократное повторение процедуры набора сдвинутых во времени входных дискретизированных отсчетов длительностью Т и определение энергетического спектра, выбор набора с максимальной энергией сигнала, принятие решение об обнаружении по набору с максимальной энергией сигнала.
Недостатком этого способа является то, что он использует тональный сигнал большой длительности и на выходе определяется спектр эхосигнала, по которому можно определить скорость сближения, но нельзя определить протяженность эхосигнала, что является одним из основных классификационных признаков.
Известны способы обнаружения и измерения параметров эхосигналов от объектов с использованием, так называемых, сложных сигналов, при обработке которых на выходе формируется корреляционная функция эхосигнала и излученного зондирующего сигнала. Эти способы нашли применение в радиолокации и гидроакустике (Р. Бенжамин Анализ радио и гидролокационных сигналов Воениздат М. 1969). Основные свойства этих сигналов определяются видом внутренней модуляции, которая определяет вид функции неопределенности. Для задач классификации в гидролокации наибольший интерес представляют псевдошумовые сигналы, которые имеют кнопочную функцию неопределенности, обеспечивающие хорошее разрешение по времени и по скорости. (В.А. Зарайский, A.M. Тюрин Теория гидролокации изд. ВМАОЛУ, Л. 1975 стр. 242). Как правило, обработка таких сигналов производится с использованием многоканальных корреляторов (там же стр. 255) или многоканальных согласованных фильтров (там же на стр. 333). Если гидролокатор неподвижен и объект локации неподвижен, то корреляции производится между излученным сигналом и принятым эхосигналом. Однако, такая ситуации практически никогда не встречается, и за счет собственного движения и движения цели происходит смещение спектра отраженного сигнала в соответствии с эффектом Доплера (там же стр. 200), в результате чего спектры не совпадают и не образуется свернутая корреляционная функция. Именно по этому, используется при приеме многоканальная обработка, где каждый канал соответствует определенной скорости цели.
Наиболее близким по количеству общих признаков с предлагаемым изобретением является способ обработки сложного сигнала приведенный в книге (В.А. Зарайский, A.M. Тюрин «Теория гидролокации» изд. ВМАОЛУ, Л. 1975 стр. 255)
Способ обработки сложного сигнала содержит следующие операции: излучение зондирующего сложного сигнала, формирования М-опорных сигналов, центральная частота которых сдвинута по частоте относительно излученного сигнала на величину K, прием эхосигнала, определение М корреляционных функций между эхосигналом и каждым из М-опорных сигналов, измерение амплитуды корреляционных функций, выбор корреляционной функции с максимальной амплитудой, определение временного положения максимума корреляционной функции для определения дистанции, определение номера опорного сигнала для определения скорости, отображение результата на индикаторе.
Недостатком указанного способа обработки является то, что для получения потенциальных свойств псевдошумового сигнала необходима взаимно корреляционная обработка принятого сигнала с опорным сигналом, который должен являться точной копией принятого сигнала. Для этой цели используется банк опорных сигналов, каждый их которых сдвинут друг относительно друга на величину, равную половина интервала корреляции по частоте. Поэтому необходимо произвести взаимно корреляционную обработку входной набранной временной реализации со всеми опорными сигналами, имеющимися в банке копий, что требует большого числа времени для получения конечного результата.
Задачей изобретения является сокращение времени обработки псевдошумового сигнала в задачах гидролокации.
Техническим результатом заявленного изобретения является сокращение времени обработки и повышение эффективности полученного результата обработки псевдошумового сигнала при использовании его в гидролокации для обнаружения объектов и измерении параметров.
Указанный технический результат достигается тем, что в известный способ обработки псевдошумового сигнала в гидролокации, содержащий излучение зондирующего псеводошумового сигнала, прием эхосигнала, взаимно корреляционную обработку, определение максимального корреляционного отклика, определение скорости лоцируемого объекта и дистанции, введены новые признаки, а именно определяют среднее значение частоты излученного зондирующего сигнала Fизл, прием сигнала осуществляют статическим веером характеристик направленности, пересекающихся на уровне не менее 0,7 от максимума, набор временных реализаций эхосигнала длительностью Т производят одновременно по всем характеристикам направленности, производят определение коэффициента корреляции между временными реализациями последовательных соседних пространственных каналов, выбирают пары соседних пространственные каналов, между которыми коэффициент корреляции превышает 0,5, из них выбирают пару каналов с максимальным значение коэффициента корреляции, определяют взаимно корреляционную функцию между каналами выбранной пары, определяют максимум взаимно корреляционной функции, определяют временное положение выбранного максимума и его амплитуду, определяют зону положительных отсчетов максимума корреляционной функции, определяют зону отрицательных отсчетов до начала зоны положительных отсчетов и зону отрицательных отсчетов после зоны положительных отсчетов, определяют граничные отсчеты имеющие разную полярность, измеряют амплитуду A1 отсчета, имеющую отрицательную полярность, измеряют значение времени этого отсчета t1, измеряют амплитуду отсчета А2, имеющего положительную полярность, следующую за отрицательным отсчетом, измеряют значение времени принадлежащее этому отсчету t2, вычисляют временное положение нулевой амплитуды сигнала несущей автокорреляционной функции по формуле Т1=А2 Д /(A1+А2), где Д интервал дискретизации, измеряют амплитуду А3 отсчета, имеющую отрицательную полярность из зоны, следующей за положительной зоной, измеряют значение времени этого отсчета t3, измеряют амплитуду отсчета А4, имеющего положительную полярность предшествующее отрицательному отсчету, измеряют значение времени принадлежащее этому отсчету t4, вычисляют временное положение нулевой амплитуды сигнала несущей корреляционной функции по формуле Т2=А3 Д /(А3+А4), вычисляют полупериод несущей частоты корреляционной функции по формуле П1=Т2-T1, определяют несущую частоту сигнала по формуле Fнес=1/2П1, определяют скорость объекта по формуле Vрад=(Fнec-Fизл)/0,69Fиз, где 0,69 имеет размерность гц/уз. Кгц. (Fиз в Кгц, Fнec и Fизл в Гц, Vpaд в узл.)
Для повышения точности измерения несущей частоты можно увеличить частоту дискретизации входного сигнала, что уменьшит интервал между отсчетами и повысит точность определения несущей частоты.
Сущность предлагаемого технического решения заключается в следующем. В прототипе для определения эхосигнала используется взаимно корреляционная обработка принятого сигнала с набором банка опорных сигналов, что требует существенных затрат вычислительных средств. Существенно меньше времени нужно для вычисления коэффициента корреляции между двумя временными реализациями. Коэффициент корреляции определяется по стандартной процедуре. Если временные отсчеты первого пространственного канала Xi и временные отсчеты второго пространственного канала Yi, то коэффициент корреляции КК определяется по следующиму известному соотношению.
где Xn - отсчеты первого пространственного канала массива Sl(n,1), Yn - отсчеты второго пространственного канала массива Sl(n,2),  Sx Sy - соответствующие средние квадратичные отклонения, Хср и Ycp - среднее по временным отсчетам.
Sx Sy - соответствующие средние квадратичные отклонения, Хср и Ycp - среднее по временным отсчетам.

После чего определяется максимальное значение коэффициента корреляции. Определение коэффициента корреляции не требует многоканальной взаимно корреляционной обработки и является стандартной процедурой всех вычислительных устройств. Практически все указанные процедуры могут быть реализованы на современных компьютерах и ноутбуках, в которых реализованы вычислительные программы Матлаб, Матсард и др.(А.Б. Сергиенко Цифровая обработка сигналов СПб. «БХВ - Петербург» 2011 г.).
Наличие максимального коэффициента корреляции между соседними пространственными каналами однозначно определяет временную реализацию с эхосигналом. Это исключает необходимость в проведении многоканальной взаимно корреляционной обработки. Теперь возникает вопрос в определении радиальной скорости и дистанции.
Поскольку пространственные каналы пересекаются на уровне 0,7, то принимаемый эхосигнал в этих каналах имеет одинаковую длительность, одинаковую частоту и одинаковую структуру. Поэтому можно определить одну взаимно корреляционную функцию между соседними пространственными каналами. Сигналы в соседних пространственных каналах практически одинаковые и поэтому взаимно корреляционная функция практически является автокорреляционной функцией (АКФ) принятого эхосигнала, что позволит упростить рассмотрение.
Корреляционная функция является кратковременной функцией, длительность которой определяется шириной полосы спектра изученного зондирующего сигнала. Известно (Дж. Бендат, А. Пирсол Применения корреляционного и спектрального анализа. Пер. с англ. Москва, «Мир», 1983, с. 71), что параметры сигнала связаны соотношением: ширина основного максимума корреляционной функции принятого сигнала (первый ноль огибающей) обратно пропорциональна ширине спектра принятого сигнала ΔT=1/ΔF, а сама корреляционная функция, принятая соседними пространственными каналами X1 и Х2 определяется выражением:
 где Wx1, x2 взаимные спектры. После несложных преобразований получим корреляционную функцию принятого сигнала
где Wx1, x2 взаимные спектры. После несложных преобразований получим корреляционную функцию принятого сигнала
 где ωв и, соответственно, fв - верхняя граничная частота спектра эхосигнала, ωн, и, соответственно, fн - нижняя граничная частота спектра эхосигнала. Эти частоты определяют полосу принятого эхосигнала. Аргумент функции
где ωв и, соответственно, fв - верхняя граничная частота спектра эхосигнала, ωн, и, соответственно, fн - нижняя граничная частота спектра эхосигнала. Эти частоты определяют полосу принятого эхосигнала. Аргумент функции  определяет среднюю несущую частоту fcp принятого эхосигнала объекта.
определяет среднюю несущую частоту fcp принятого эхосигнала объекта.
Таким образом, корреляционная функция содержат две составляющие, одна из которых определяется полосой спектра сигнала  , а другая - средней частотой спектра сигнала
, а другая - средней частотой спектра сигнала  Составляющая, определяемая полосой сигнала, является огибающей функции В(τ), а составляющая, определяемая средней частотой, является несущей частотой функции. При движении цели ее частота изменяется в зависимости от скорости собственного движения и от скорости цели, что приведет к смещению спектра отраженного сигнала относительно спектра излученного сигнала Fизл.
Составляющая, определяемая полосой сигнала, является огибающей функции В(τ), а составляющая, определяемая средней частотой, является несущей частотой функции. При движении цели ее частота изменяется в зависимости от скорости собственного движения и от скорости цели, что приведет к смещению спектра отраженного сигнала относительно спектра излученного сигнала Fизл.
Измерить само значение средней частоты корреляционной функции с помощью процедуры БПФ представляет значительные трудности, поскольку длительность корреляционной функции определяется полосой сигнала  Разрешающая способность процедуры БПФ определяется длительностью входной временной реализации процесса. Поскольку длительность корреляционной функции мала, то и спектральные отсчеты на выходе БПФ будут иметь плохое разрешение. Это не позволит измерить радиальную скорость. Поэтому предлагается измерить не саму несущую частоту корреляционной функции, а длительность полупериода
Разрешающая способность процедуры БПФ определяется длительностью входной временной реализации процесса. Поскольку длительность корреляционной функции мала, то и спектральные отсчеты на выходе БПФ будут иметь плохое разрешение. Это не позволит измерить радиальную скорость. Поэтому предлагается измерить не саму несущую частоту корреляционной функции, а длительность полупериода  корреляционной функции принятого эхосигнала, который однозначно связан с несущей частотой принятого эхосигнала, и по нему рассчитывать радиальную скорость.
корреляционной функции принятого эхосигнала, который однозначно связан с несущей частотой принятого эхосигнала, и по нему рассчитывать радиальную скорость.
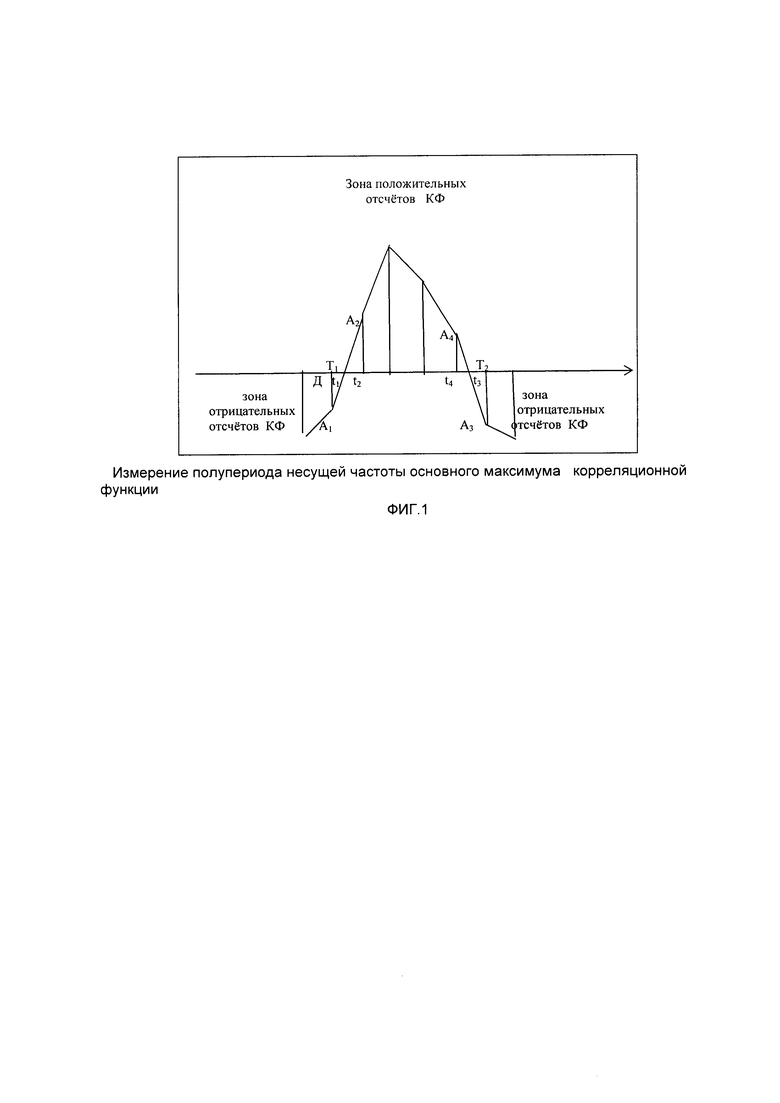
Результатом определения корреляционной функции на выходе системы обработки является последовательность временных отсчетов (фиг. 1). По расположению этих отсчетов и по измерению амплитуд этих отсчетов определяется полупериод несущей частоты корреляционной функции принятого эхосигнала. Корреляционная функция является апериодической функцией, которая имеет глобальный максимум, относительно которого располагаются положительный полупериод несущей частоты. Определяют максимальную амплитуду в зоне положительных отсчетов полупериода несущей частоты. После этого можно определить временное положение точек перехода от положительного значения к отрицательному значению, что соответствует временному положению полупериода. Для этого определяют зону отрицательных отсчетов до начала зоны положительных отсчетов и зону отрицательных отсчетов после зоны положительных отсчетов. В этих пределах должны находиться границы полупериода. Для нахождения этих границ (фиг. 1) определяют амплитуды A1 и А2, соответствующие отсчетам t1 и t2, и А3 и А4, соответствующие отсчетам t3 и t4, что позволяет определить временное положение переходов корреляционной функции через ноль T1 и Т2 и полупериод корреляционной функции П, по которому определяют Fнес. В конечном итоге Vрад, определяемая по формуле Vрад=(Fнес-Fизл)/0,69Fиз, где 0,69 - коэффициент, учитывающий эффект Доплера; 0,69 имеет размерность гц/уз, Кгц. (Fиз в Кгц, Fнес и Fизл в Гц, Vрад в узл.) (Дж. Уоррен Хортон. «Основы гидролокации». Судпромгиз. 1961 г. стр. 452).
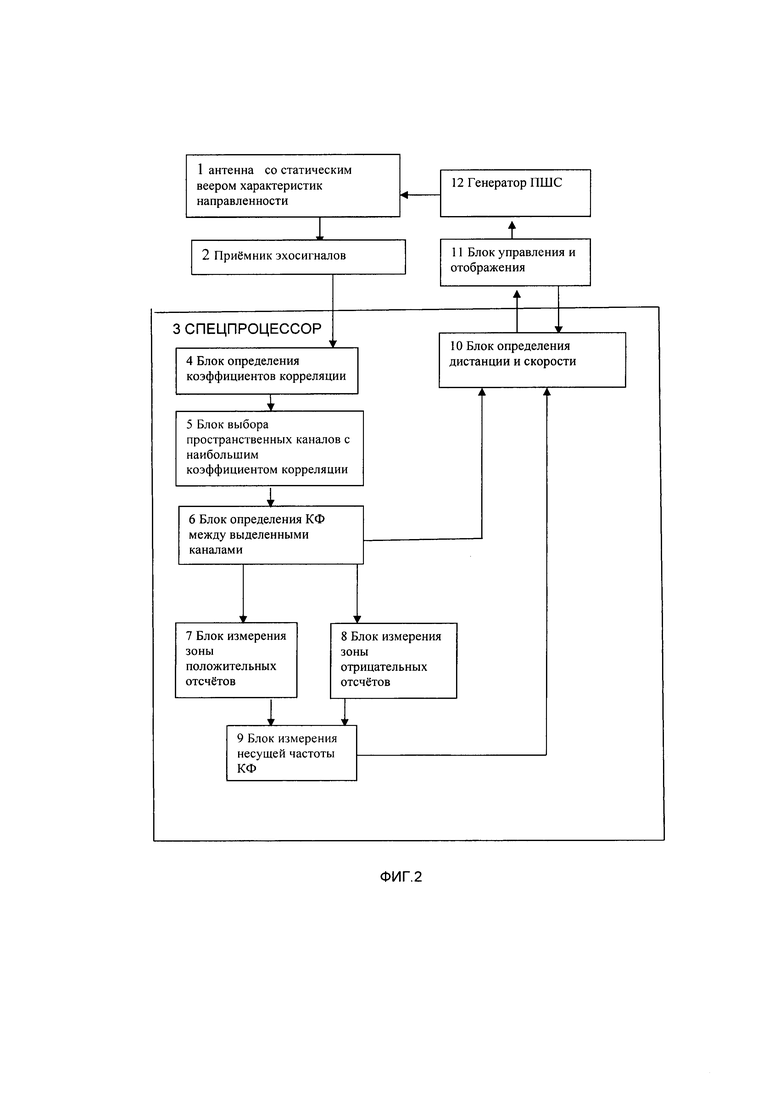
Сущность изобретения поясняется фиг. 1 и фиг. 2, при этом на фиг. 1 представлена последовательность измерений полупериода несущей автокорреляционной функции, на фиг. 2 блок схема устройства реализующего способ,
Антенна 1 (фиг. 2) со статическим веером характеристик направленности последовательно соединена с приемником 2 эхосигналов и спецпроцессором 3, в который входят последовательно соединенные блок 4 определения коэффициентов корреляции, блок 5 выбора пространственных каналов с наибольшим коэффициентом корреляции, блок 6 определения корреляционной функции между выделенными каналами, блок 7 измерения зоны положительных отсчетов, блок 9 измерения несущей частоты корреляционной функции, блок 10 определения скорости и дистанции. В состав устройства (фиг. 2) также входят блок 11 управления и отображения, вход которого соединен с блоком 10, первый выход через блок 12 генератор ПШС соединен с антенной 1, а второй выход с блоком 10. Второй выход блока 6 через блок 8 соединен со вторым входом блока 9, а третий выход блока 6 соединен со вторым входом блока 10.
Принципы цифрового преобразования и обработки достаточно подробно приведены в работе («Применение цифровой обработки сигналов» п/р Оппенгейма М. Мир 1980 г. стр. 389-436.). В настоящее время практически вся гидроакустическая аппаратура выполняется на спецпроцессорах, которые преобразуют акустический сигнал в цифровой вид и производят в цифровом виде формирование характеристик направленности, многоканальную обработку и обнаружение сигнала, а также корреляционную обработку и процедуры ее анализа. Вопросы реализации спецпроцессоров достаточно подробно рассмотрены в книге Ю.А. Корякин, С.А. Смирнов, Г.В. Яковлев «Корабельная гидроакустическая техника» Санкт-Петербург «Наука»2004 г. стр. 281.
Реализацию предложенного способа целесообразно продемонстрировать на примере работы устройства (фиг. 2).
С блока 11 управления и отображения подается сигнал на генератор 12 ПШС, который формирует зондирующий псевдошумовой сигнал и излучает его приемо-излучающей антенной 1. Одновременно в блок 10 определение дистанции и скорости передается среднее значение излученной частоты в герцах Fизл. Отраженный эхосигнал от объекта принимается статическими характеристиками антенны 1 и передается на приемник 2 эхосигналов, где производится преобразование аналогового сигнала, принятого антенной 1, в цифровой вид, после чего последовательными временными порциями временные реализации пространственных каналов передаются в спецпроцессор 3. В блоке 4 спецпроцессора 3 происходит определение коэффициента корреляции (КК) между последовательными временными реализациями соседних пространственных каналов. В блоке 5 производится определение пространственных каналов, у которых КК превысил пороговое значение 0,5, и выбор среди них пространственных каналов с максимальным значением коэффициента корреляции. Поскольку пространственные каналы пересекаются на уровне 0,7, то амплитудные значение эхосигналов будут отличаться незначительно друг от друга, а их структура будет идентична. Поэтому их взаимно корреляционная функция будет практически автокорреляционной функцией АКФ принятого эхосигнала. Полученная корреляционная функция передается в блок 6 измерения зоны положительных отсчетов, где выбираются максимальные положительные отсчеты, определяются крайние положительные отсчеты, измеряются их временное положение и амплитуда и передаются в блок 9 измерения несущей частоты. Одновременно эта же корреляционная функция передается в блок 8 определения зоны отрицательных отсчетов, где определяются амплитудные значения и временные положения крайних отрицательных отсчетов соседних с зоной положительных отсчетов и передаются на второй вход блока 9 измерения несущей частоты корреляционной функции. Процедура измерения положительного полупериода несущей частоты автокорреляционной функции представлена на фиг. 2. По измеренным значениям A1, t1, А2, t2, A3, t3, A4, t4 производится вычисление временных положений T1 и Т2 и определение положительного полупериода несущей корреляционной функции. Полученное значение полупериода используется для вычисления несущей частоты Fнес в герцах. Это значение передается в блок 10 для вычисления радиальной скорости по формуле Vрад=(Fнес-Fизл)/0,69Fиз, где 0,69 имеет размерность гц/уз. кгц. (Fиз в Кгц, Fнес и Fизл в Гц, Vрад в узл.) (Дж. Уоррен Хортон Основы гидролокации Судпромгиз Л. 1961 г. стр. 452), а дистанция определяется по временному положению максимума. Обычно частота дискретизации в блоке 2 приемнике эхосигналов выбирается в 2 раза выше, чем верхняя частота принимаемого сигнала с учетом скорости перемещения цели. Для повышения точности измерения несущей частоты можно увеличить частоту дискретизации в блоке 2, что уменьшит интервал между отсчетами в зоне положительных отсчетов и в зоне отрицательных отсчетов и повысит точность определения несущей частоты. При этом сама ширина зоны положительных отсчетов и зоны отрицательных отсчетов не изменится.
Таким образом, можно существенно сократить объем вычислительных операций с использованием последовательного определения коэффициента корреляции между временными реализациями соседних пространственных каналов, что позволяет найти временную реализацию с эхосигналом от цели, определить корреляционную функцию принятого эхосигнала и определить среднюю частоту принятого эхосигнала, после чего измерить скорость и дистанцию.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидролокационный способ обнаружения объекта и измерения его параметров | 2018 |
|
RU2697937C1 |
| Гидролокационный способ классификации с использованием псевдошумового сигнала | 2020 |
|
RU2735929C1 |
| Способ определения параметров цели гидролокатором | 2017 |
|
RU2650835C1 |
| Гидролокационный способ классификации объектов | 2022 |
|
RU2791152C1 |
| Гидроакустический способ определения параметров цели при использовании взрывного сигнала с беспроводной системой связи | 2018 |
|
RU2692841C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТА И ИЗМЕРЕНИЯ ЕГО ПАРАМЕТРОВ | 2016 |
|
RU2627977C1 |
| Способ обнаружения локального объекта на фоне распределенной помехи | 2019 |
|
RU2736097C1 |
| ГИДРОЛОКАЦИОННЫЙ СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ В КОНТРОЛИРУЕМОЙ АКВАТОРИИ | 2015 |
|
RU2593824C1 |
| Способ обнаружения локального объекта на фоне распределенной помехи при бистатической гидролокации | 2019 |
|
RU2736567C1 |
| Способ обработки и классификации гидролокационной информации | 2019 |
|
RU2725517C1 |
Изобретение относится к области гидроакустики и может быть использовано для построения систем автоматического обнаружения эхо-сигналов, принятых гидролокатором на фоне шумовой и реверберационной помехи, и измерения параметров объекта при использовании псевдошумовых сигналов. Предложенный способ обработки псевдошумового сигнала в гидролокации содержит излучение зондирующего псеводошумового сигнала, прием эхо-сигнала, взаимно корреляционную обработку, определение максимального корреляционного отклика, определение скорости лоцируемого объекта и дистанции, определяют среднее значение частоты излученного зондирующего сигнала Fизл, прием сигнала осуществляют статическим веером характеристик направленности, пересекающихся на уровне не менее 0,7 от максимума, набор временных реализаций эхо-сигнала длительностью Т производят одновременно по всем характеристикам направленности, производят определение коэффициента корреляции между временными реализациями последовательных соседних пространственных каналов, выбирают пары соседних пространственные каналов, между которыми коэффициент корреляции превышает 0,5, из них выбирают пару каналов с максимальным значением коэффициента корреляции, определяют взаимно корреляционную функцию между каналами выбранной пары, определяют максимум взаимно корреляционной функции, определяют временное положение выбранного максимума и его амплитуду, определяют зону положительных отсчетов максимума корреляционной функции, определяют зону отрицательных отсчетов до начала зоны положительных отсчетов и зону отрицательных отсчетов после зоны положительных отсчетов, определяют граничные отсчеты, имеющие разную полярность, измеряют период несущей автокорреляционной функции и определяют несущую частоту принятого эхо-сигнала, после чего определяют радиальную скорость. Предложенный способ позволяет сократить время обработки псевдошумового сигнала и повысить ее эффективность при использовании в гидролокации для обнаружения объектов и измерении параметров. 2 ил.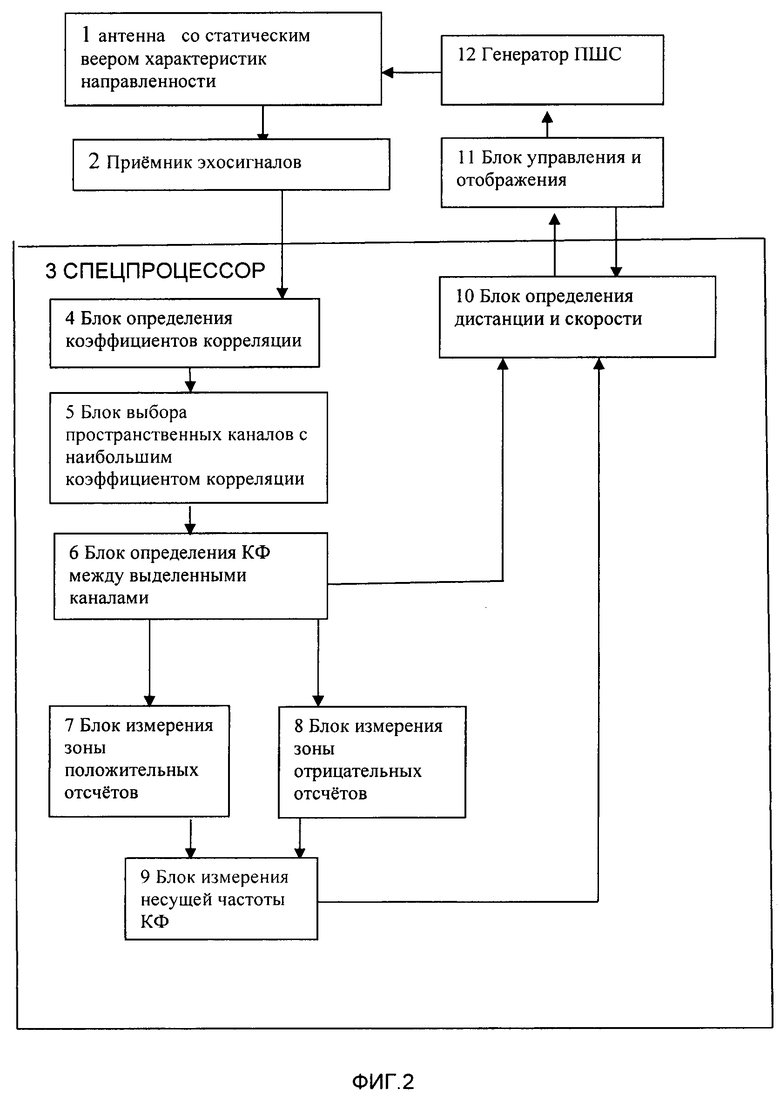
Способ обработки псевдошумового сигнала в гидролокации, содержащий излучение зондирующего псеводошумового сигнала, прием эхо-сигнала, взаимно корреляционную обработку, определение максимального корреляционного отклика, определение скорости лоцируемого объекта и дистанции, отличающийся тем, что определяют среднее значение частоты излученного зондирующего сигнала Fизл, прием сигнала осуществляют статическим веером характеристик направленности, пересекающихся на уровне не менее 0,7 от максимума, набор временных реализаций эхо-сигнала длительностью Т производят одновременно по всем характеристикам направленности, производят определение коэффициента корреляции между временными реализациями последовательных соседних пространственных каналов, выбирают пары соседних пространственные каналов, между которыми коэффициент корреляции превышает 0,5, из них выбирают пару каналов с максимальным значением коэффициента корреляции, определяют взаимно корреляционную функцию между каналами выбранной пары, определяют максимум взаимно корреляционной функции, определяют временное положение выбранного максимума и его амплитуду, определяют зону положительных отсчетов максимума корреляционной функции, определяют зону отрицательных отсчетов до начала зоны положительных отсчетов и зону отрицательных отсчетов после зоны положительных отсчетов, определяют граничные отсчеты, имеющие разную полярность, измеряют амплитуду A1 отсчета, имеющего отрицательную полярность, измеряют значение времени этого отсчета t1, измеряют амплитуду отсчета А2, имеющего положительную полярность, следующую за отрицательным отсчетом, измеряют значение времени, принадлежащее этому отсчету t2, вычисляют временное положение нулевой амплитуды сигнала несущей корреляционной функции по формуле T1=А2Д/(A1+А2), где Д - интервал дискретизации, измеряют амплитуду А3 отсчета, имеющего отрицательную полярность из зоны, следующей за положительной зоной, измеряют значение времени этого отсчета t3, измеряют амплитуду отсчета А4, имеющего положительную полярность, предшествующую отрицательному отсчету, измеряют значение времени, принадлежащее этому отсчету t4, вычисляют временное положение нулевой амплитуды сигнала несущей корреляционной функции по формуле Т2=А3Д/(A3+А4), вычисляют полупериод несущей частоты корреляционной функции по формуле П1=Т2-T1, определяют несущую частоту сигнала по формуле Fнec=1/2П1, определяют скорость объекта по формуле Vрад=(Fнec-Fизл)/0,69Fиз, где 0,69 имеет размерность Гц/уз. кГц (Fиз в кГц, Fнec и Fизл в Гц, Vpaд в уз.).
| Гидролокационный способ обнаружения объекта и измерения его параметров | 2017 |
|
RU2674552C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ ОБЪЕКТА ПО ЕГО ШУМОИЗЛУЧЕНИЮ | 2015 |
|
RU2593622C1 |
| Способ определения параметров цели гидролокатором | 2017 |
|
RU2650835C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ ОБЪЕКТА В ВОДНОЙ СРЕДЕ | 2015 |
|
RU2602759C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ЛОКАЛЬНОГО ОБЪЕКТА НА ФОНЕ РАСПРЕДЕЛЕННОЙ ПОМЕХИ | 2016 |
|
RU2634787C1 |
| СПОСОБ ОБРАБОТКИ ГИДРОАКУСТИЧЕСКИХ СИГНАЛОВ СО СЛОЖНЫМ ЗАКОНОМ МОДУЛЯЦИИ | 2001 |
|
RU2293356C2 |
| Способ обработки сигналов с гиперболической частотной модуляцией | 2018 |
|
RU2711420C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ШУМЯЩИХ В МОРЕ ОБЪЕКТОВ | 2005 |
|
RU2298203C2 |
| CN 202929209 U, 08.05.2013 | |||
| CN 101504459 B, 23.05.2012. | |||

