Изобретение относится к ближней локации и может быть использовано в информационно-измерительных средствах и системах, работающих в режимах активной пеленгации локализованных объектов, на фоне распределенных в пространстве помех.
Существующие в настоящее время автономные информационные системы (АИС) (акустические с широкополосными сигналами и радиолокационные системы миллиметрового диапазона длин волн) не позволяют пеленговать объекты, находящиеся за преградами на фоне распределенных в пространстве помех на малых расстояниях. Также возникает проблема формирования узких диаграмм направленности приемо-передающих трактов в ближней зоне.
Аналогом предлагаемого устройства является пеленгатор широкополосных сигналов с временной взаимокорреляционной обработкой сигналов Автономные информационные и управляющие системы (см. [1] Труды кафедры «Автономные информационные и управляющие системы» МГТУ им. Н.Э. Баумана / под ред. А.Б. Борзова. М.: ООО НИЦ« Инженер», ООО «Онико-М», 2011. Т. 4, стр. 216), содержащий приемные антенны; фильтры; усилители; компараторы; аналоговые ключи; сумматоры; интеграторы; детектор; схемы «И», «ИЛИ», «НЕ».
В пеленгаторе реализуются функциональные односторонние преобразования сигналов вида:


выраженные через знаковые функции
Недостатком данного устройства является невозможность проведения используемых логических операций для сверхширокополосных сигналов субнаносекундного диапазона локаторов с сверхкороткими импульсами (СКИ).
Наиболее близким по технической сущности к разрабатываемому устройству является радиолокационный пеленгатор локализованных объектов, содержащий передатчик, антенну в виде однополосного волнового моноимпульсного облучателя, приемник, регистратор (см. Коваленко Н.А. Методы подповерхностной радиолокации для обнаружения людей за непрозрачными средами, ж. Восточно-Европейский журнал передовых технологий, 2011, выпуск 9, т. 3 стр. 49-55).
Недостатком данного устройства является невозможность формирования узких диаграмм направленности приемо-передающего радиолокационного тракта, низкая точность пеленгации локализованного малоконтрастного объекта на фоне распределенной помехи и невозможность запреградного действия, которое может быть реализовано в субнаносекундном диапазоне СКИ.
Задачей изобретения является повышение точности пеленгации локализованного слабоконтрастного объекта на фоне распределенной в пространстве помехи и обеспечение запреградного действия по локализованному объекту. Для реализации поставленной задачи в предлагаемом радиолокационном пеленгаторе локализованных объектов, содержащем излучатель, передающую антенну, приемную антенну, приемный модуль, исполнительное устройство, введены вторая приемная антенна, второй приемный модуль и коррелятор для оценки взаимно корреляционной функции, при этом обе приемные антенны выполнены сверхширокополосными, вторая приемная антенна выполнена подвижной относительно первой и расположена на расстоянии от нее 
где d - расстояние между приемными антеннами, λ0=0,18 м - средняя длина волны, а излучатель выполнен в виде генератора сверхкороткого импульсного излучения.
Изобретение поясняется чертежом, где изображены:
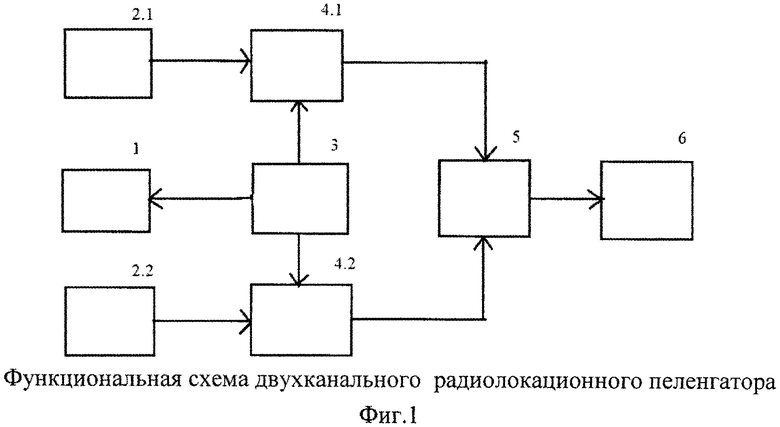
- на фиг. 1 - функциональная схема двухканального радиолокационного пеленгатора,
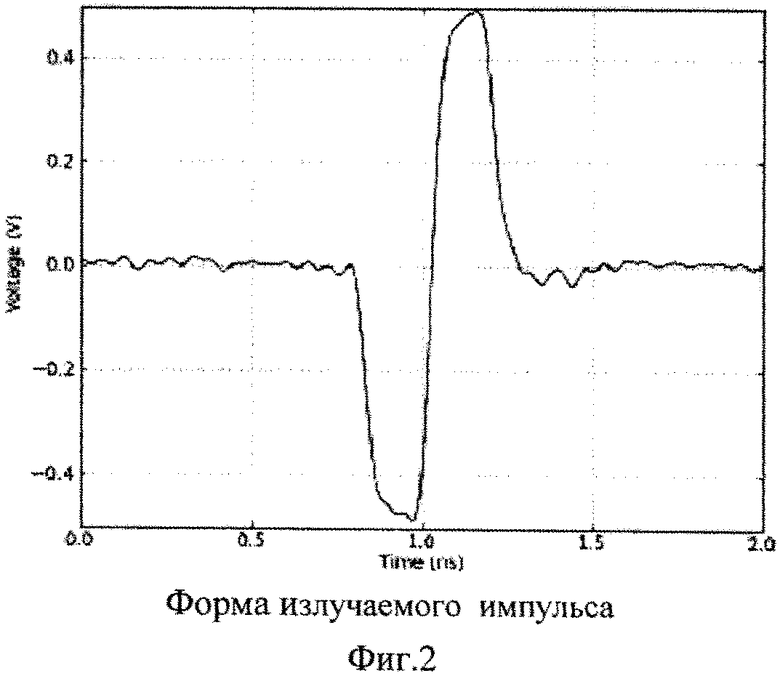
- на фиг. 2 - форма излучаемого импульса в излучателе сверхкоротких импульсов - распределение амплитуды излучаемого сверхкороткого импульса с формой 1-й производной функции Гаусса,
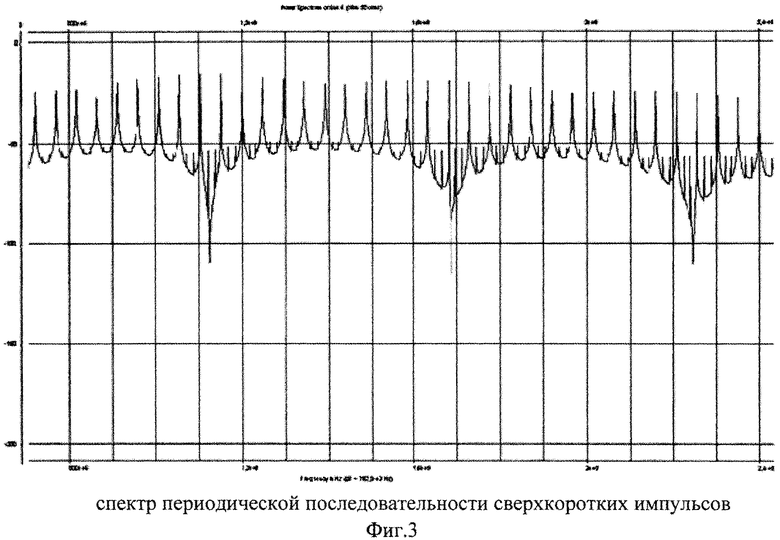
- на фиг. 3 - спектр периодической последовательности сверхкоротких импульсов,
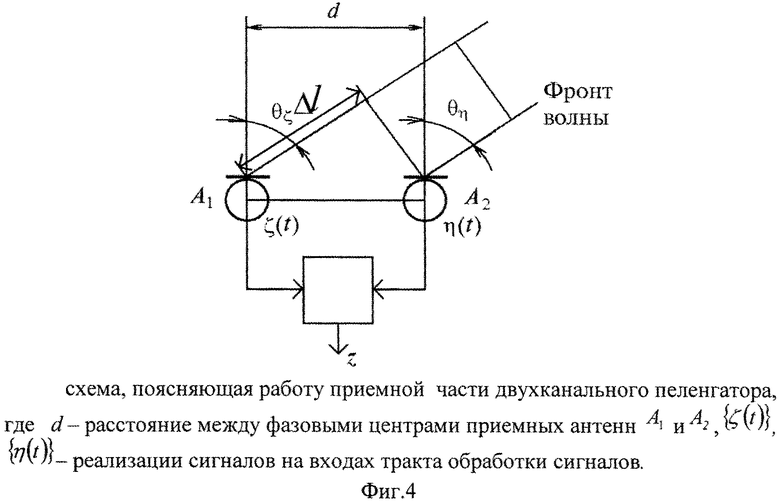
- на фиг. 4 - схема, поясняющая работу приемной части двухканального пеленгатора, где d - расстояние между фазовыми центрами приемных антенн A1 и А2,  - реализации сигналов на входах тракта обработки сигналов.
- реализации сигналов на входах тракта обработки сигналов.
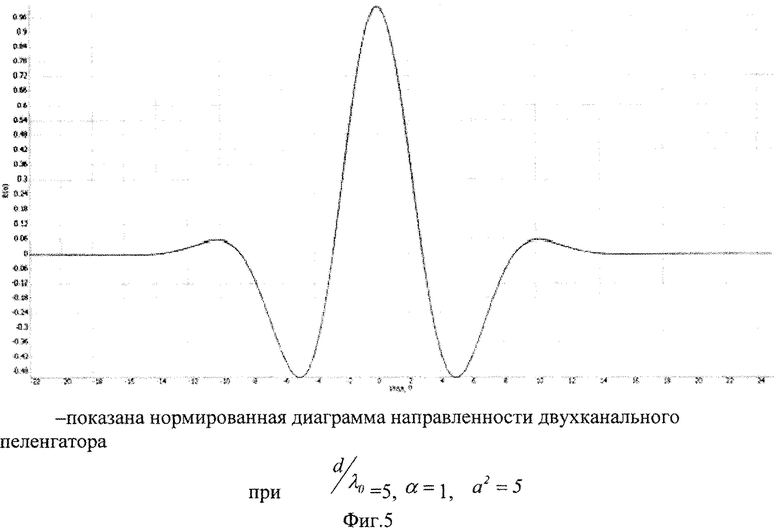
- на фиг. 5 - нормированная диаграмма направленности двухканального пеленгатора.
Радиолокационный пеленгатор локализованных объектов (фиг. 1) содержит передающую антенну 1, приемные антенны 2.1 и 2.2, излучатель 3 сверхкороткого импульсного излучения, выполненного на радиолокационном приемопередатчике ИС «Импульс», интегрированном на одном кристалле, приемные модули 4.1 и 4.2, блок 5 корреляционной обработки, исполнительное устройство 6.
Излучатель 3 генерирует сверхкороткий импульс наносекундного диапазона, который поступает на передающую антенну 1. Антенна 1, расположенная на границе раздела двух сред, зондирует подповерхностный объект. Зондирующие сигналы, облучающие объект, отражаются обратно им и поступают на приемные антенны 2.1 и 2.2. Далее сигналы от обеих антенн поступают в приемные модули 4.1 и 4.2, где регистрируется результирующий сигнал: исследуемый и помехи.
В двухканальном пеленгаторе используется излучатель сверхкороткого импульсного (СКИ) минирадара типа «Минирадар-МСР», выполненного на радиолокационном приемопередатчике ИС «Импульс», интегрированном на одном кристалле. Сверхширокая полоса частот передаваемых импульсов дает уникальные способности по прохождению через препятствия и высокую точность. На один метр дистанции время распространения сигнала (до цели и обратно) составляет примерно 6,6 наносекунд. «Минирадар-МСР» использует сверхкороткие импульсы с формой 1-й производной функции Гаусса (фиг. 1) и длительностью менее 1 нс в частотном диапазоне от 0,5 до 3 ГГц. Это позволяет ему достигать высокого пространственного разрешения с возможностью работы как на коротких, так и на больших расстояниях. Для рассматриваемой периодической с периодом Ти=50 МГц последовательности СКИ импульсов (фиг. 3) центральная частота спектра составляет f0=1,6 ГГц, полоса по уровню -20 дБ Δf=1,6 ГГц (fH=0,8 ГГц, fB=2,4 ГГц), относительная ширина полосы  средняя длина волны λ0=0,18 м. В системах с двухэлементной антенной (фиг. 4) с широкополосными сигналами на входе возможно формирование диаграммы направленности (ДН) [1].
средняя длина волны λ0=0,18 м. В системах с двухэлементной антенной (фиг. 4) с широкополосными сигналами на входе возможно формирование диаграммы направленности (ДН) [1].
На основании того, что излучается периодическая последовательность импульсов с периодом Ти, описываемых нечетной функцией (фиг. 2), реализацию изучаемого сигнала можно записать:


где: Xk -амплитуда; ωk - частота гармоники; ω0 - центральная частота; Δω - шаг по частоте, определяемый периодом повторения импульсов  ; yk - фаза k-ой гармоники; k=0, ±1; ±2……±m; 2m - количество гармоник в практической полосе зондирующего сигнала; t- текущее время.
; yk - фаза k-ой гармоники; k=0, ±1; ±2……±m; 2m - количество гармоник в практической полосе зондирующего сигнала; t- текущее время.
На основании принятых допущений, сигналы  и
и  на выходах антенн от i-го точечного элементарного отражателя при соотнесении фронта волны к середине раскрыва (фиг. 4) в комплексной форме могут быть представлены в виде:
на выходах антенн от i-го точечного элементарного отражателя при соотнесении фронта волны к середине раскрыва (фиг. 4) в комплексной форме могут быть представлены в виде:

где:  ;
;  - длина волны электромагнитных колебаний; d - расстояние между приемными антеннами (фиг. 2); k=0, ±1; ±2……±m;
- длина волны электромагнитных колебаний; d - расстояние между приемными антеннами (фиг. 2); k=0, ±1; ±2……±m; 


где индексы k характеризуют частоты координатных функций, а индексы i - номера элементарных точечных источников сигнала.
Для распределенной в пространстве помехи, представленной точечными элементарными отражателями, выражения для  и
и  будут аналогичны равенствам (3).
будут аналогичны равенствам (3).
Считая сигналы и помехи некоррелированными, результирующие реализации на выходах антенн представим в виде:


где индексами c и n отмечены углы визирования сигнала объекта и помехи
Причем средние значения квадрата амплитуды  случайных амплитуд спектральных составляющих Vk будут:
случайных амплитуд спектральных составляющих Vk будут:

т.е

Поскольку процессы  и
и  центрированы, то нормированная взаимокорреляционная функция на выходах антенн А1 и А2 будет:
центрированы, то нормированная взаимокорреляционная функция на выходах антенн А1 и А2 будет:

где: θc и θп - углы визирования соответственно объекта и помехи; τ - величина сдвига, * - означает комплексное сопряжение; M[] - оператор математического ожидания.
На основании статистической независимости случайных фаз αki и выражений (3)-(5), нормированная взаимокорреляционная функция сигналов на выходах антенн 2.1 и 2.2 будет:

Отношение сигнал/помеха по мощности запишется как:

Тогда при нулевом сдвиге τ=0 нормированная взаимная корреляционная функция сигналов на выходах антенн 2.1 и 2.2 (фиг. 4) будет иметь вид:

где F - функция направленности антенны на i элементарный источник.
Вычисляя в тракте обработки сигналов (корреляторе 5) двухканального пеленгатора с широкополосными сигналами нормированную взаимную корреляционную функцию реализаций сигналов на выходах антенн, возможно формировать функцию направленности пеленгатора.
Для оценок потенциальной точности пеленгации локализованных излучателей на фоне распределенных в пространстве помех по полученным зависимостям (7) и (8) на ЭВМ по были рассчитаны нормированные взаимные корреляционные функции сигналов на выходах антенн 2.1 и 2.2 (в функции от угла пеленга объекта θc при различных значениях безразмерных параметров а
2,  ,
,  (где λ0 - длина волны, соответствующая средней частоте энергетического спектра; α и
(где λ0 - длина волны, соответствующая средней частоте энергетического спектра; α и  Δω - относительная и абсолютная ширина полосы энергетического спектра; а
2 - отношение сигнал/помеха по мощности).
Δω - относительная и абсолютная ширина полосы энергетического спектра; а
2 - отношение сигнал/помеха по мощности).
Модель помехи была представлена точечными излучателями, равномерно распределенными в горизонтальной плоскости с шагом по углу Δθ=5 град. в пределах диаграммы направленности Δ0,1 при Δ0,5=60 град. Объект представлялся точечным отражателем, расположенным в той же плоскости, что и помеха.
На фиг. 5 приведена рассчитанная нормированная диаграмма направленности двухканального пеленгатора с широкополосными сигналами.
Как следует из фиг. 5 и (8), используя взаимную корреляционную функцию сигналов на выходах приемных модулей, возможно осуществлять пеленгацию локализованных объектов на фоне распределенных в пространстве помех.
На выходе блока корреляционной обработки 5 (фиг. 2) вычисляется оценка нормированной взаимокорреляционной функции центрированных сигналов с выходов приемных блоков 4.1 и 4.2:

где Т - интервал времени усреднения, x(t) и y(t) - центрированные реализации сигналов на выходах приемных модулей (4.1 и 4.2, фиг 1).
Величина сдвига τ, при котором взаимная корреляционная функция (9) достигает экстремума, характеризует угол пеленга θ локализованного объекта.
Как следует из фиг. 4

С - скорость света.
Откуда оценка угла пеленга объекта
Таким образом, выполнение радиолокационного пеленгатора двухканальным с корреляционной обработкой позволяет повысить точность пеленгации локализованного слабоконтрасного объекта на фоне распределенной в пространстве помехи и обеспечение запреградного действия по локализованному объекту.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАДИОЛОКАЦИОННЫЙ ИЗМЕРИТЕЛЬ МЕСТОПОЛОЖЕНИЯ ЗАПРЕГРАДНОГО ОБЪЕКТА | 2014 |
|
RU2580828C1 |
| РАДИОЛОКАЦИОННЫЙ ФИКСАТОР ДАЛЬНОСТИ С КОМБИНИРОВАННОЙ ЧАСТОТНОЙ МОДУЛЯЦИЕЙ И ПРЕДЕЛЬНОЙ РЕГРЕССИОННОЙ ОБРАБОТКОЙ | 2012 |
|
RU2508557C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПЕЛЕНГАЦИОННОЙ ПАНОРАМЫ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ НА ОДНОЙ ЧАСТОТЕ | 2012 |
|
RU2528177C2 |
| СПОСОБ ПЕЛЕНГАЦИИ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ НА ОДНОЙ ЧАСТОТЕ | 2008 |
|
RU2380719C2 |
| СИСТЕМА БЛИЖНЕЙ ЛОКАЦИИ ДЛЯ ОБНАРУЖЕНИЯ ОБЪЕКТОВ | 2013 |
|
RU2535302C1 |
| СПОСОБ ЗАЩИТЫ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ ОТ ПРОТИВОРАДИОЛОКАЦИОННЫХ РАКЕТ И РАЗВЕДЫВАТЕЛЬНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2002 |
|
RU2205418C1 |
| Многофункциональный бортовой радиолокационный комплекс | 2017 |
|
RU2670980C9 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК НАЛОЖИВШИХСЯ ДРУГ НА ДРУГА РАДИОСИГНАЛОВ ОДНОЙ ЧАСТОТЫ | 2013 |
|
RU2551115C1 |
| Система пассивной локации для определения координат летательного аппарата в ближней зоне аэродрома и на этапе захода на посадку с резервным каналом определения дальности | 2016 |
|
RU2633380C1 |
| СПОСОБ РАСПОЗНАВАНИЯ ЦЕЛЕЙ ОТ СЛУЧАЙНЫХ РЕВЕРБЕРАЦИОННЫХ ПОМЕХ | 2008 |
|
RU2366973C1 |
Изобретение относится к радиолокационным пеленгаторам запреградных объектов. Достигаемый технический результат - повышение точности пеленгации локализованного слабоконтрасного объекта на фоне распределенной в пространстве помехи и обеспечение запреградного действия по локализованному объекту. Указанный результат достигается за счет того, что радиолокационный пеленгатор локализованных объектов содержит излучатель, передающую антенну, две приемные антенны, два приемных модуля, коррелятор для оценки взаимно корреляционной функции, исполнительное устройство, при этом вторая приемная антенна выполнена подвижной относительно первой и расположена на расстоянии от нее 
где d - расстояние между приемными антеннами, λ0=0,18 м - средняя длина волны, при этом излучатель выполнен в виде генератора сверхкороткого импульсного излучения. 5 ил.
Радиолокационный пеленгатор локализованных объектов, содержащий излучатель, передающую антенну, приемную антенну, приемный модуль, исполнительное устройство, отличающийся тем, что в него введены вторая приемная антенна, второй приемный модуль, и коррелятор для оценки взаимно корреляционной функции, при этом обе приемные антенны выполнены сверхширокополосными, вторая приемная антенна выполнена подвижной относительно первой и расположена на расстоянии от нее 
| КОВАЛЕНКО Н.А | |||
| Методы подповерхностной радиолокации для обнаружения людей за непрозрачными средами | |||
| Восточно-Европейский журнал передовых технологий | |||
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| СИСТЕМА БЛИЖНЕЙ ЛОКАЦИИ ДЛЯ ОБНАРУЖЕНИЯ ОБЪЕКТОВ | 2013 |
|
RU2535302C1 |
| СПОСОБ ОБРАБОТКИ СИГНАЛОВ ПРИ ДВУХКАНАЛЬНОЙ АМПЛИТУДНОЙ ПЕЛЕНГАЦИИ | 2001 |
|
RU2225990C2 |
| Фазометр | 1985 |
|
SU1307386A2 |
| US 4236159 A1, 25.11.1980 | |||
| Манипулятор | 1987 |
|
SU1426782A1 |
| US 7423961 B2, 09.09.2008. | |||

