Предлагаемое устройство для Преобразования координат относится к устройствам счетно-решающей техники и может быть применено в системах автоматики, в вычислительных устройствах и т. д.
Известные преобразователи координат, содержащие линейные потенциометры, дают возможность производить дреобразование функций ТОЛЬКО на (плоскости.
Предлагаемое устройство отличается от иззестных тем, что в нем перпенди-кулярно неподвижному основанию на опорном лодщипнике установлена стойка с продольным пазом, 3 верхней части которой в лазу на оси, лараллельной основанию, установлена контактная втулка с подвижным относительно нее прямолинейным каркасом лервого лотенциометра. На оси контактной втулки жестко закреплен контактный движок второго потенциометра, полукруглый Каркас которого установлен на пластине, закрепленной на стойке перпендикулярно плоскости основания. В нижней части стойки перлендикулярно ее оси жестко укреплен контактный движок третьего потенциометра, полукруглый каркас которого закреплен на основании.
Эти ОТЛИЧИЯ ПОЗВОЛЯЮТ :ЦреобразО|Вывать координаты лространственных .кривых, в результате чего расширяются функциональные возможности устройства.
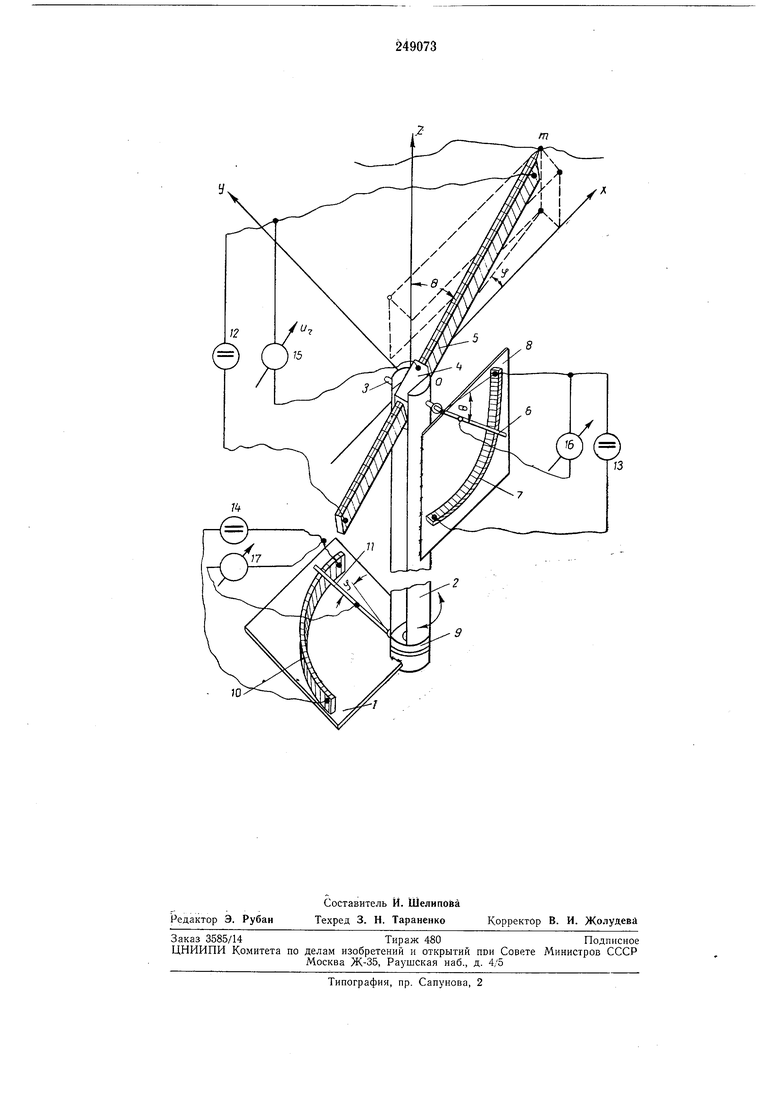
На чертеже схематически изображено предлагаемое устройство.
Перпендикулярно неподвижному основанию 1 установлена стойка 2, верхняя часть которой совмещена с началом координат. Стойка имеет продольный паз, Б верхней части которого на оси 3 укреплена своими боковыми сторонами контактная втулка 4, принадлежащая потенциометру 5 (потенциометр для измерения полярного радиуса). Конструктивно контактная втулка 4 жестко скреплена с осью 3, свободно посаж-енной в гнездах боковых сторон стойки. В результате контактная втулка имеет возможность вращаться в пазу вместе с осью относительно гнезд в стойке. Кроме этого, каркас потенциометра 5 может перемещаться относительно контактной втулки 4.
К оси 5 с внешней стороны от стойки жестко прикреплен контактный движок 6 потенциометра 7. Каркас потенциометра 7 установлен на пластине 8, которая прикреплена к стойке 2. В нижней части стойка 2 соединена через вращающееся сочленение (опорный подшипник 9) с неподвижным основанием /.
В области подвижного сочленения установлен третий потенциометр 10. Каркас потенциометра смонтирован на неподвижнол основании, а его контактный движок 11 прикреплен к стойке 2.
Кроме того, устройство имеет источники питания 12-14 и регистрирующие приборы 15- 17.
Положение любой точки в пространстве в системе полярных координат определяется величиной полярного радиуса и двумя углами. Для определения (полярных координат точки т какой-либо пространственной кривой концы линейного потенциометра совмещают с точкой т заданной функции. Для случая, когда необходимо измерять траекторию движущегося тела, конец этого потенциометра следует прикрепить « телу, совершающему движение в пространстве.
Расстояние от определяет величину полярного радиуса г, т. е. расстояние от начала координат до выбранной точки функции. Конец каркаса потенциометра 5 может быть совмещен с любой точкой заданного трехмерного пространства, так как, кроме возможности перемещения каркаса этого потенциометра относительно контактной втулки, сама контактная вместе с каркасом может изменять свой угол в вертикальной плоскости за счет того, чтс она закреплена на оси, установленной в боковых сторонах стойки, а также изменять угол в горизонтальной плоскости, поскольку стойка может вращаться вокруг своей оси относительно основания.
В результате того что все потенциометры выполнены по линейному закону, напряжение и, снимаемое с потенциометра 5, пропорционально величине полярного радиуса, т. е. UfS от.
Величину полярного расстояния 6 получаем с помощью потенциометра 7. Достигается это тем, что к оси 3 жестко прикреплен контактный движок 6 потенциометра 7.
Устанавливая каркас потенциометра 5 по отношению к вертикальной оси на некоторый
угол 0, тем самым движок 6 потенциометра смещают на такой же угол в. Далее, поскольку каркас потенциометра 7 закреплен на вертикальной стойке, то он вращается одновременно со стойкой вокруг ее оси, что позволяет измерять угол в при любых углах долготы ф.
Долготу (угол ф) получают путем перемещения контактного движка потенциомет1ра 10, прикрепленного к подвижной стойке 2 относительно каркаса, закрепленного неподвижно на основании.
Таким образом, с помощью предложенного устройства можно получать все три полярные координаты в виде трех напряжений.
Предмет изобретения
Устройство для преобразования декартовых координат в полярные, соде|ржащее линейные потенциометры и источники питания, отличающееся тем, что, с целью расширения функциональных возможностей устройства, в нем перпендикулярно неподвижному основанию на апорлом подши1пнике установлена стойка с продольным пазом, в верхней части которой в пазу на оси, параллельной основанию, установлена конта1ктная 1втулка с подвижным относительно нее прямолинейным каркасом первого потенциометра, на оси контактной втулки жестко закреплен контакный движок второго потенциометра, полукруглый каркас которого установлен на пластине, закрепленной на стойке перпендикулярно плоскости основания, а в нижней части стойки перпендикулярно ее оси жестко укреплен контактный движок третьего потенциометра, полукруглый каркас которого закреплен на основании.

| название | год | авторы | номер документа |
|---|---|---|---|
| ПРЕОБРАЗОВАТЕЛЬ ПРЯМОУГОЛЬНЫХ КООРДИНАТВ ПОЛЯРНЫЕ | 1969 |
|
SU235410A1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ И ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ КОМПЛЕКСНЫХ ВЕЛИЧИН | 1970 |
|
SU265579A1 |
| УСТРОЙСТВО для МОДЕЛИРОВАНИЯ И СУММИРОВАНИЯ КОМПЛЕКСНЫХ ВЕЛИЧИН | 1970 |
|
SU279181A1 |
| ПРИБОР ДЛЯ ТОЧЕЧНОГО ПРЕОБРАЗОВАНИЯ | 1968 |
|
SU211106A1 |
| Устройство для обмотки длинномерного сердечника | 1988 |
|
SU1745658A1 |
| Учебный прибор по навигации | 1990 |
|
SU1744703A1 |
| Потенциометр | 1981 |
|
SU1010666A1 |
| УСТРОЙСТВО ДЛЯ ПОСТРОЕНИЯ ПРОФИЛЯ КОРРЕКТОРА ФУНКЦИОНАЛЬНОГО ПОТЕНЦИОМЕТРА | 1967 |
|
SU214344A1 |
| ДВЕРНОЙ БЛОК | 2004 |
|
RU2273713C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПРОФИЛЯ ГРАНИЧНОЙ ПОВЕРХНОСТИ ТВЕРДОГО ТЕЛА В ВИДЕ ЗУБА | 1994 |
|
RU2086207C1 |