Изобретение относится к учебным наглядным пособиям по навигации и предназначено для демонстрации группе слушателей принципа действия гироорбитанта (орбитального гирокомпаса).
Известен учебный прибор по навигации, содержащий основание, трехстепенной гироскоп с датчиками коррекции по углу крена и демпфирования по углу рыскания, вертикальную стойку, закрепленную на основании, модель планеты, выполненную в виде шарового сегмента и установленную неподвижно на верхнем конце стойки, и горизонтальную кулису, смонтированную на подшипниковом узле вертикальной стойки с возможностью вращения в горизонтальной
плоскости от привода, ротор трехстепенного гироскопа выполнен в виде колоколооб- разного тела вращения и установлен на сферическом шарнире, который укреплен на отогнутом вверх конце горизонтальной кулисы, при этом первый датчик содержит постоянный магнит, закрепленный с помощью вертикального кронштейна на горизонтальной кулисе между ротором гироскопа и основанием шарового сегмента, и находящееся в поле магнита кольцо, выполненное из магнитомягкого материала, которое укреплено снаружи колоколообраз- ного ротора на уровне его центра масс, сов- падающего с центром сферического шарнира, а второй датчик содержит два под
4
4 vj
О
СО
ковообразных магнита, закрепленных на вертикальном конце кулисы полюсами от кулисы, и кольцо, вмонтированное в нижнюю часть юбки колоколообразного ротора, причем кольцо второго датчика расположено внутри кольца первого датчика.
Конструкция прототипа предусматривает установку прибора при демонстрации на какую-либо подставку (стол), что затрудняет его обзор в обычной учебной аудитории. Кроме того, для изменения режима демонстрации прибора (снятия и установки датчиков) требуется затормаживание ротора, так как манипуляции с прибором в режиме, когда его массивный ротор вращается с большой скоростью, опасны.
Цель изобретения - расширение демонстрационных возможностей.
Поставленная цель достигается тем, что в учебном приборе по навигации, содержащем основание, подшипниковый узел, кулису, привод кулисы, модель планеты, трехстепенной гироскоп, ротор которого выполнен в виде колоколосбразного тела вращения и установлен на сферическом шарнире, который укреплен на отогнутом конце кулисы, датчики коррекции по углу крена и демпфирования по углу рыскания, первый из которых содержит магнит, закрепленный с помощью кронштейна на кулисе между ротором гироскопа и основанием шарового сегмента, и находящееся в поле магнита кольцо, выполненное из магнитомягкого материала, которое укреплено снаружи колоколообразного ротора на уровне его центра масс, совпадающего с центром сферического шарнира, а второй датчик содержит два подковообразных магнита, закрепленных на конце кулисы полюсами от кулисы, и кольцо, выполненное из немагнитного электропроводящего материала, вмонтированное в нижнюю часть юбки ротора, причем кольцо второго датчика расположено внутри кольца первого датчика, в нем основание выпол- нено в виде вертикальной панели с элементами крепления для подвеса, на лицевой части которой нанесено плоское изображение модели планеты, в центре которого выполнено отверстие в панели и установлен подшипниковый узел, в котором перпендикулярно плоскости панели закреплена ось своей средней частью с возможностью вращения, на переднем конце которой со стороны лицевой части панели закреплена кулиса с трехстепенным гироскопом, а на противоположном конце - противовес, уравновешивающий кулису с гироскопом, магниты датчиков коррекции по углу крена и демпфирования по углу рысканья выполнены в виде электромагнитов, и введен блок питания, первый и второй выходы которого через соответствующие потенциометры и через скользящие контакты подшипниково5 го узла соединены проводниками с соответствующими электромагнитами датчиков коррекции, а третий выход подключен через третий потенциометр к электродвигателю привода кулисы, при этом кулиса имеет
10 внутреннее сквозное отверстие, через которое пропущены проводники к электромагнитам.
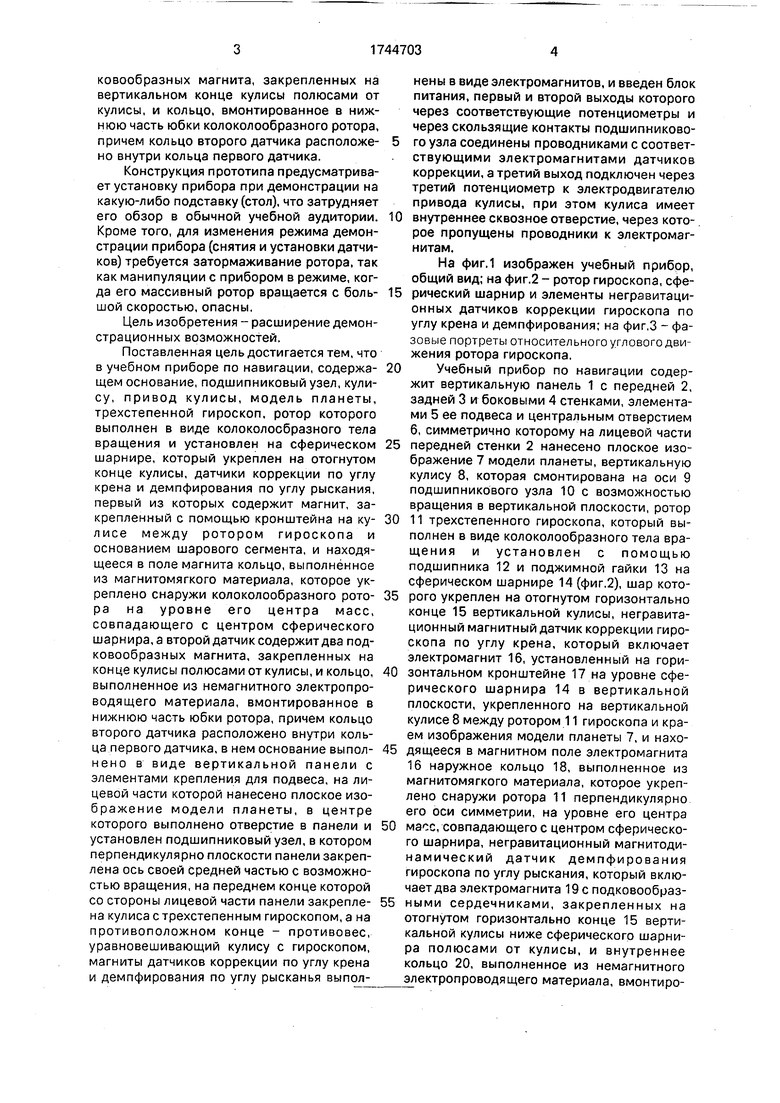
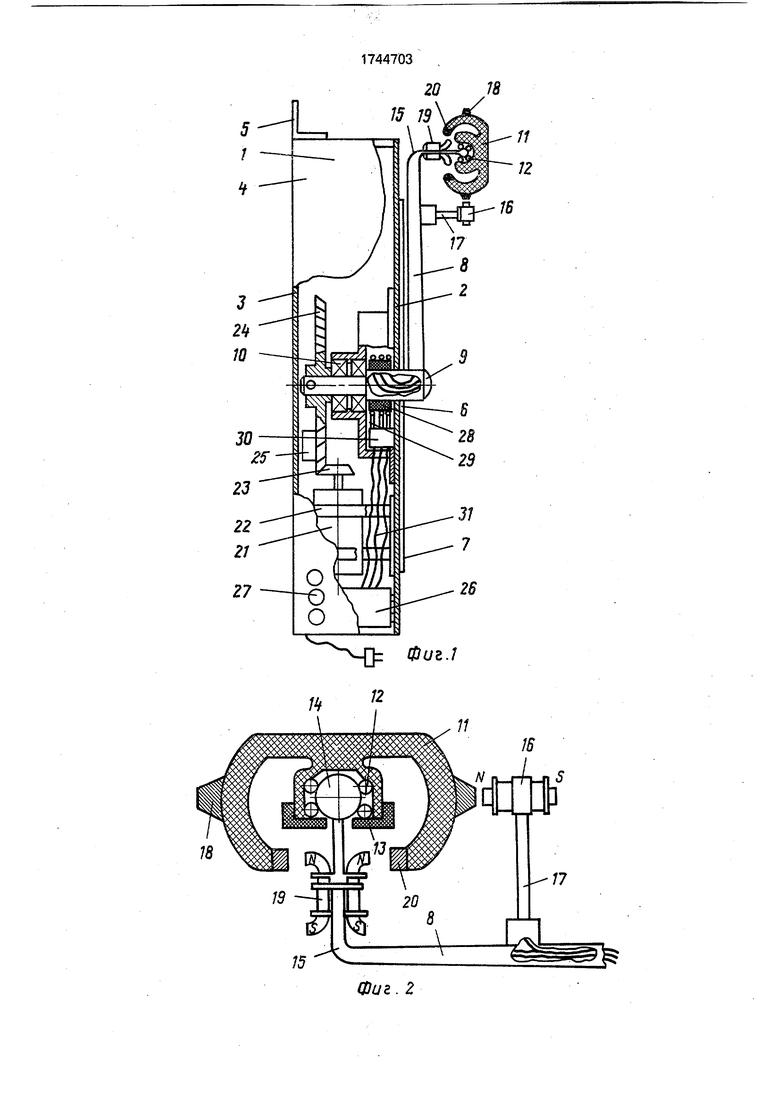
На фиг.1 изображен учебный прибор, общий вид; на фиг.2 - ротор гироскопа, сфе15 рический шарнир и элементы негравитационных датчиков коррекции гироскопа по углу крена и демпфирования; на фиг.З - фазовые портреты относительного углового движения ротора гироскопа.
0 Учебный прибор по навигации содержит вертикальную панель 1 с передней 2, задней 3 и боковыми 4 стенками, элементами 5 ее подвеса и центральным отверстием б, симметрично которому на лицевой части
5 передней стенки 2 нанесено плоское изображение 7 модели планеты, вертикальную кулису 8, которая смонтирована на оси 9 подшипникового узла 10 с возможностью вращения в вертикальной плоскости, ротор
0 11 трехстепенного гироскопа, который выполнен в виде колоколообразного тела вращения и установлен с помощью подшипника 12 и поджимной гайки 13 на сферическом шарнире 14 (фиг.2), шар кото5 рого укреплен на отогнутом горизонтально конце 15 вертикальной кулисы, негравитационный магнитный датчик коррекции гироскопа по углу крена, который включает электромагнит 16, установленный на гори0 зонтальном кронштейне 17 на уровне сферического шарнира 14 в вертикальной плоскости, укрепленного на вертикальной кулисе 8 между ротором 11 гироскопа и краем изображения модели планеты 7, и нахо5 дящееся в магнитном поле электромагнита 16 наружное кольцо 18, выполненное из магнитомягкого материала, которое укреплено снаружи ротора 11 перпендикулярно его оси симметрии, на уровне его центра
0 масс, совпадающего с центром сферического шарнира, негравитационный магнитоди- намический датчик демпфирования гироскопа по углу рыскания, который включает два электромагнита 19с подковообраз5 ными сердечниками, закрепленных на отогнутом горизонтально конце 15 вертикальной кулисы ниже сферического шарнира полюсами от кулисы, и внутреннее кольцо 20, выполненное из немагнитного электропроводящего материала, вмонтированное в нижнюю часть юбки колоколооб- разного ротора так, чтобы при крене ротора , 11 кольцо находилось между полюсами того или иного электромагнита 19, причем кольцо второго датчика расположено внутри кольца первого датчика.
Устройство снабжено электроприводом поворота кулисы вокруг горизонтальной оси 9 панели, который включает электродвигатель 21, укрепленный на стойках 22 передней 2 стенки панели, на оси которого установлена ведущая шестерня 23, ведомую шестерню 24, установленную на свободном конце горизонтальной оси с укрепленным на нем противовесом 25 кулисы с гироскопом, блоком 26 регулирования питания обмоток электромагнитов 16 и 19 и электродвигателя 21 привода поворота кулисы с органами 27 управления, втулкой 28 с контактными кольцами, укрепленной на- оси 9, и скользящими контактами 29, установленными на колодке 30, соединенной с передней стенкой 2 панели для подвода питания к электромагнитам через соответствующие проводники 31.
Устройство работает следующим образом.
В первом режиме (демонстрации свойства устойчивости свободного гироскопа) ротору 11 придается произвольное положение на сферическом шарнире 14, характеризующееся некоторыми начальными значениями углов крена /5 и рыскания а. (/Зн и (л - соответственно), после чего он раскручивается с помощью внешнего двигателя до рабочей скорости. Затем посредством подключения блока 26 к сети и поворота первого органа 27 управления подается питание к электродвигателю 21 привода кулисы 8. Через ведущую 23 и ведомую 24 конические шестерни механический момент электродвигателя передается на ось 9 и затем на кулису 8, вызывая ее вращательное движение вокруг горизонтальной оси. Тем самым имитируется (демонстрируется) орбитальное движение ротора гироскопа 11 с угловой скоростью а)0. Поскольку в данном режиме питание на электромагниты 16 и 19 не подается в силу свойства устойчивости свободного гироскопа, ось соответственного вращения ротора 11 совершает полярно видимое сложное движение.
С одной стороны ее направление относительно инерциального пространства (окружающих предметов) остается неизменным, а с другой стороны относительно вращающейся кулисы указанная ось совершает движение по образующей конуса, имеющего вершину в точке подвеса (сферическом
шарнире 14) и ось симметрии, параллельную вектору моделируемой орбитальной угловой скорости W0. На фазовой плоскости (в координатах углов а и в ) относительное угловое движение гироскопа отображается круговой траекторией, показанной на фиг. За.
Для перехода к второму режиму демонстрации - показу колебательного процесса
ориентации стесненного по углу/ гироскопа, осуществляется подача питания к электромагниту 16 негравитационного датчика коррекции гироскопа по углу крена с помощью поворота второго органа 27 управления. Этот режим демонстрации позволяет показать сущность процесса коррекции, ги- роорбитанта спутника с помощью специальных средств, например инфракрасной вертикали. За счет изменения силы тока в
обмотке электромагнита 16 выбирается необходимая крутизна Кд характеристики негравитационного датчика коррекции гироскопа по углу крена ft. В результате взаимодействия электромагнита 16 с
наружным кольцом 18 к вращающемуся ротору 11 будет приложен механический момент вдоль оси X (ось X имеет начало в центре сферического шарнира 12, расположена в вертикальной плоскости вращения кулисы и перпендикулярна к продольной оси кулисы).
/;.
где/ -угол крена;
Kjj - варьируемая поворотом потенциометра крутизна характеристики датчика коррекции.
Воздействие механического момента
Мхм- на гироузел приводит к изменению фазового портрета углового движения гироскопа: вытягиванию круговой траектории в эллипс вдоль оси /, показанному на фиг.36. Точка b на фазовой плоскости отображает
момент перехода к данному режиму.
Для перехода к третьему режиму демонстрации - показу затухающего колебательного процесса ориентации вращающегося ротора орбитального гирокомпаса (гироорбитанта), дополнительно включается электромагнит 19 датчика демпфирования ротора по углу рыскания путем поворота третьего органа 27 управления блока-26 регулирования питания. В результате из-за электродинамического взаимодействия магнитного поля электромагнита 19 и вращающегося кольца 20 образуется сила торможения ротора F, которая характеризуется равенством
F K -Q-/J,
где Кл - коэффициент пропорциональности, величина которого зависит от заданной органами 27 управления силы тока в обмотке электромагнита 19;
Q- угловая скорость собственного вращения ротора;
угол крена.
В силу того, что сила торможения F приложена к кольцу 20, смещенному на расстояние I относительно центра подвеса ротора, то к ротору гироскопа в дополнение к моменту Мхм будет приложен механический момент вдоль продольной оси кулисы
MYM Кх -О &
являющийся аналогом момента демпфирования в прототипе, что приведет к затуханию колебаний ротора и ориентации его оси вращения по направлению вектора орбитальной угловой скорости оТо Момент перехода к третьему режиму (точка с) и соответствующий ему фазовый портрет приведены на фиг.Зв.
Конструкция предлагаемого прибора позволяет совершать переходы от первого режима демонстрации к второму, от второго к третьему без приведения учебного прибора в исходное состояние, т.е. без остановки вращения кулисы и ротора. Устройство прибора позволяет, манипулируя только органами 27 управления, чередовать в любой последовательности перечисленные режимы, не прерывая демонстрации и объяснений принципов функционирования реальных навигационных приборов. Кроме того, возможность варьирования в процессе показа значениями коэффициентов К, К и скорости вращения кулисы ш0 обеспечивает необходимые условия для демонстрации влияния параметров приборов на характеристики качества их функционирования, что позволяет наглядно проиллюстрировать принципы выбора рациональных (оптимальных) значений указанных параметров.
С помощью введенных элементов и органов управления можно реализовать следующую дидактическую схему: показ свободного гироскопа, совершающего орбитальное движение - показ свободного гироскопа, совершающего орбитальное движение при действии коррекции по углу крена - показ свободного гироскопа, совершающего орбитальное движение при действии коррекции по крену и демпфирования по рысканию. При этом устройство позволяет наглядно показать свойство устойчивости - колебания гироскопа - затухающий
переходный процесс ориентации ротора гироскопа.
Формула изобретения
Учебный прибор по навигации, содержащий основание, подшипниковый узел, кулису, привод кулисы, модель планеты, трехстепенной гироскоп, ротор которого
выполнен в виде колоколообразного тела вращения и установлен на сферическом шарнире, который укреплен на отогнутом конце кулисы, датчики коррекции по углу крена и демпфирования по углу рыскания,
первый из которых содержит магнит, закрепленный с помощью кронштейна на кулисе между ротором гироскопа и основанием шарового сегмента, и находящееся в поле магнита кольцо, выполненное
из магнитомягкого материала, которое укреплено снаружи колоколообразного ротора на уровне его центра масс, совпадающего с центром сферического шарнира, а второй датчик содержит два подковообразных магнита, закрепленных на конце кулисы полюсами от кулисы, и кольцо, выполненное из немагнитного электропроводящего материала, вмонтированное в нижнюю часть юбки ротора, причем кольцо
второго датчика расположено внутри кольца первого датчика, отличающийся тем, что, с целью расширения демонстрационных возможностей, в нем основание выполнено в виде вертикальной панели с
элементами крепления для подвеса, на лицевой части которой нанесено плоское изображение модели планеты, в центре которого выполнено отверстие в панели и установлен подшипниковый узел, в котором
перпендикулярно плоскости панели закреплена ось своей средней частью с возможностью вращения, на переднем конце которой со стороны лицевой части панели закреплена кулиса с трехстепенным гироскопом, а на
противоположном конце - противовес уравновешивающий кулису с гироскопом, магниты датчиков коррекции по углу крена и демпфирования по углу рыскания выполнены в виде электромагнитов, и введен блок
питания, первый и второй выходы которого через соответствующие потенциометры и через скользящие контакты подшипникового узла соединены проводниками с соответствующими электромагнитами датчиков
коррекции, а третий выход подключен через третий потенциометр к электродвигателю привода кулисы.при этом кулиса имеет внутреннее сквозное отверстие, через которое пропущены проводники к электромагнитам.
Со
ел
t
ru
а


| название | год | авторы | номер документа |
|---|---|---|---|
| Учебный прибор по навигации | 1989 |
|
SU1647624A1 |
| СПОСОБ УПРАВЛЕНИЯ И СТАБИЛИЗАЦИИ ПОДВИЖНОГО НОСИТЕЛЯ, ИНТЕГРИРОВАННАЯ СИСТЕМА, УСТРОЙСТВО ПРИВЕДЕНИЯ ЗЕРКАЛА АНТЕННЫ В ПОВОРОТНОЕ ДВИЖЕНИЕ В ДВУХ ВЗАИМНО ПЕРПЕНДИКУЛЯРНЫХ ПЛОСКОСТЯХ И УСТРОЙСТВО ПРИВЕДЕНИЯ В ДЕЙСТВИЕ ДИФФЕРЕНЦИАЛЬНЫХ АЭРОДИНАМИЧЕСКИХ РУЛЕЙ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2423658C2 |
| Способ управления космическим аппаратом дистанционного зондирования Земли | 2019 |
|
RU2722598C1 |
| СИСТЕМА ОРИЕНТАЦИИ | 2003 |
|
RU2239160C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВ ПОВОРОТА ДВИЖУЩЕГОСЯ С УСКОРЕНИЕМ АППАРАТА С ПОМОЩЬЮ ГИРОВЕРТИКАЛИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2138017C1 |
| Способ спутниковой гравитационной градиентометрии | 2020 |
|
RU2745364C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ СТАБИЛИЗАЦИИ НАПРАВЛЕНИЯ ЗЕРКАЛА АНТЕННОГО УСТРОЙСТВА НА ОБЪЕКТ ВИЗИРОВАНИЯ С ОДНОВРЕМЕННЫМ ФОРМИРОВАНИЕМ СИГНАЛОВ ТОРМОЖЕНИЯ ВРАЩЕНИЯ ПО КРЕНУ ПОДВИЖНОГО НОСИТЕЛЯ ПРИ КРУГОВОМ ВРАЩЕНИИ ОСНОВАНИЯ АНТЕННОГО УСТРОЙСТВА, УСТАНОВЛЕННОГО ЖЕСТКО ВНУТРИ КОРПУСА ВРАЩАЮЩЕГОСЯ ПО КРЕНУ ПОДВИЖНОГО НОСИТЕЛЯ, И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2336611C1 |
| Учебный прибор для демонстрации прецессии гироскопа | 1984 |
|
SU1161984A1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА С УПРАВЛЯЕМОЙ ОРИЕНТАЦИЕЙ | 2017 |
|
RU2669481C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПОДВИЖНЫХ НАЗЕМНЫХ ОБЪЕКТОВ | 2015 |
|
RU2603821C2 |
Изобретение относится к учебным пособиям по навигации и предназначено для демонстрации принципа действия гироор- битанта. Цель - повышение наглядности де- монстрации принципа действия гироорбитанта и расширение демонстрационных возможностей. Учебный прибор по навигации содержит вертикальную панель с центральным отверстием, симметрично которому на лицевой части панели нанесено изображение модели планеты, кулису, которая смонтирована на горизонтальной оси, ротор гироскопа, установленный на сферическом шарнире, негравитационный, магнитный датчик коррекции гироскопа по углу крена с электромагнитом и наружным кольцом из магнитомягкого материала, датчик демпфирования гироскопа по углу рыскания с электромагнитами и кольцом из немагнитного электропроводящего материала, элек- тродвигатель с шестерней, ведомую шестерню на оси, блок регулирования электромагнитов, органы управления, втулку с контактными кольцами и скользящие контакты. После раскручивания ротора демонстрируется его устойчивость при орбитальном движении вокруг модели планеты, затем влияние коррекции по углу крена, далее влияние коррекции по углу крена и демпфирования по углу рыскания, при этом переходы от одного режима к другому производятся без остановки ротора гироскопа, 3 ил. ел
| Учебный прибор по навигации | 1989 |
|
SU1647624A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
