Известен бесконтактный магнитоакустический преобразователь, например, к дефектоскопу, содержащий магнит, торцовая поверхность полюса которого является рабочей поверхностью, и катушку индуктивности, закрепленную на рабочей поверхности. Этот преобразователь имеет повышенную чувствительность только в направлении нормали к поверхности контролируемого изделия.
Предложенный преобразователь отличается от известного тем, что он снабжен дополнительными катушками индуктивности, аналогичными первой, расположенными на рабочей поверхности магнита эквидистантно, рядом одна с другой, и возбуждаемыми поочередно, что обеспечивается например, включением катушек в искусственную длинную линию. Это позволяет повысить чувствительность в направлении, отличном от нормали поверхности изделия, за счет обеспечения наклонного ввода и Приема акустических колебаний.
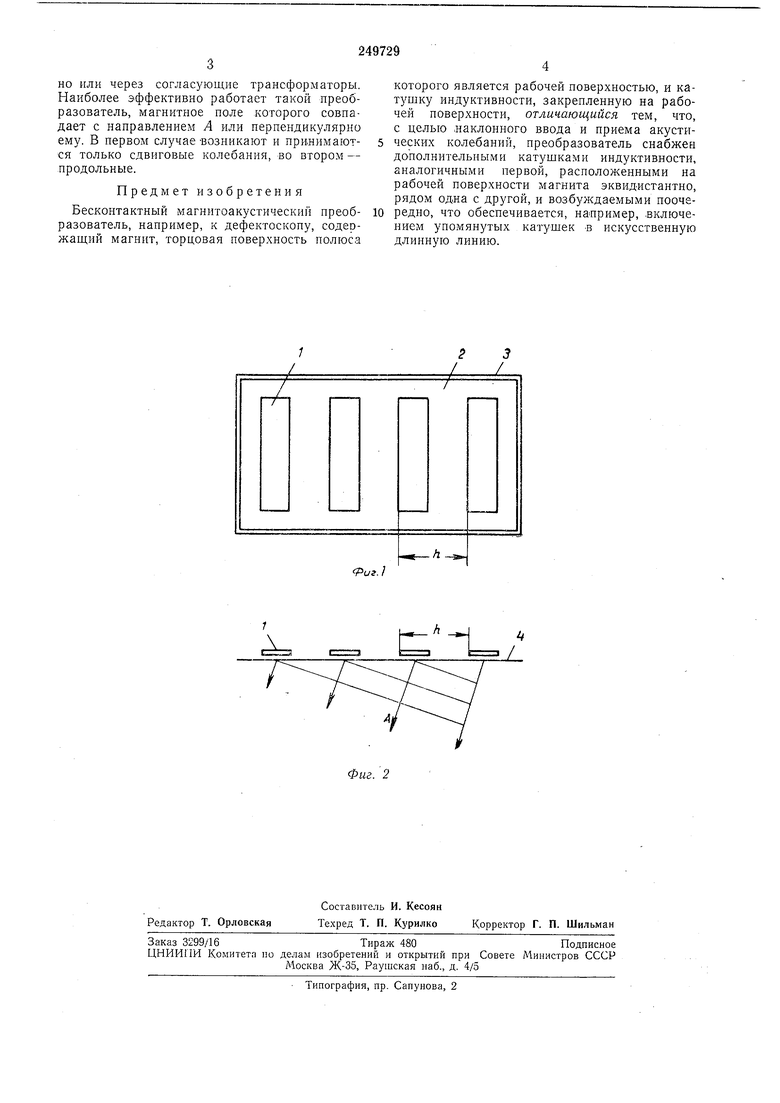
На фиг. 1 показан предложенный преобразователь, вид с рабочей поверхности; на фиг. 2 - схема формирования диаграммы направленности.
Преобразователь состоит из катушек индуктивности 1, расположенных на рабочем торце 2 магнита эквидистантно, рядом одна с другой, с шагом Л. Магнит и катушки заключены
в экранирующий корпус 3, открытый с рабочей стороны.
Катушки индуктивности (или проводиики) в зависимости от необходимой частоты колебаний могут состоять как из нескольких витков, так и из прямых отрезков провода, как в данном случае.
В рабочем положении преобразователь устанавливают на поверхности контролируемого
изделия 4 открытым тор.цом 2, и через катушки индуктивности / пропускают переменный ток. В результате в поверхностном слое контролируемого изделия возникает переменное электромагнитное поле, а в проводящих и магнитных телах - акустические волны.
Шаг 1г и запаздывание тока в каждой последующей катушке (рабочем проводнике) выбраны так, чтобы акустические колебания были в фазе в любой плоскости, перпендикулярной необходимому направлению А повышенной чувствительности. Это направление при возбул дении образуется за счет суперпозиции волн от каждой катушки. При приеме катушки подключепы таким образом, чтобы
их сигналы суммировались с запаздыванием, которое определяется направлением А приходящей волны и шагом h.
но или через согласующие трансформаторы. Наиболее эффективно работает такой преобразователь, магнитное поле которого совпадает с направлением А или перпендикулярно ему. В первом случае -возникают и принимаются только сдвиговые колебания, во втором - продольные.
Предмет изобретения
Бесконтактный магнитоакустический преобразователь, например, к дефектоскопу, содержащий магнит, торцовая поверхность полюса
которого является рабочей поверхностью, и катушку индуктивности, закрепленную на рабочей поверхности, отличающийся тем, что, с целью наклонного ввода и приема акустических колебаний, преобразователь снабжен дополнительными катушками индуктивности, аналогичными первой, расположенными на рабочей поверхности магнита эквидистантно, рядом одна с другой, и возбуждаемыми поочередно, что обеспечивается, например, включением упомянутых катушек -в искусственную длинную линию.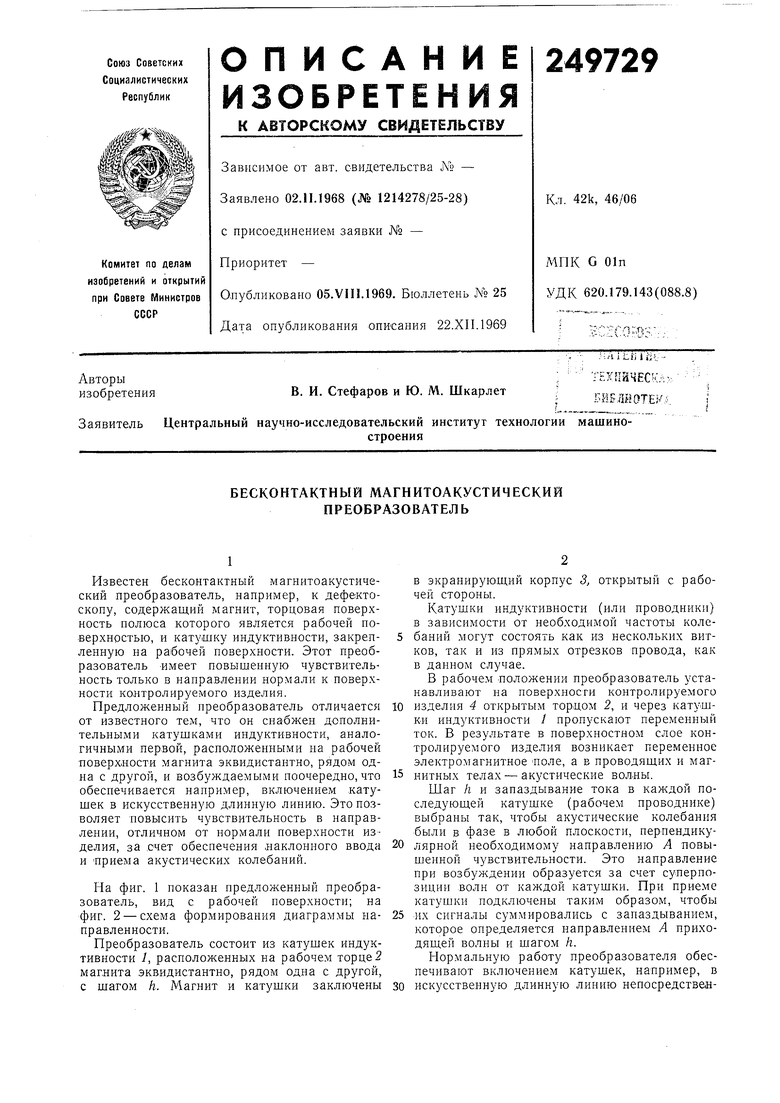
| название | год | авторы | номер документа |
|---|---|---|---|
| Электромагнитно-акустический преобразователь для ультразвукового контроля | 2016 |
|
RU2649636C1 |
| Электромагнитно-акустический дефектоскоп | 1990 |
|
SU1797039A1 |
| Электромагнитно-акустический преобразователь | 1989 |
|
SU1684656A1 |
| ЭЛЕКТРОМАГНИТНО-АКУСТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2002 |
|
RU2219539C1 |
| БЕСКОНТАКТНЫЙ ЭЛЕКТРОМАГНИТНО-АКУСТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 1972 |
|
SU353751A1 |
| Электромагнитно-акустический преобразователь для неразрушающего контроля | 1988 |
|
SU1758546A1 |
| СПОСОБ БЕСКОНТАКТНОГО НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2661312C1 |
| Электромагнитно-акустический преобразователь для токопроводящих материалов | 1989 |
|
SU1760442A1 |
| ЭЛЕКТРОМАГНИТНО-АКУСТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2016 |
|
RU2656134C2 |
| Электромагнитно-акустический дефектоскоп | 1985 |
|
SU1377716A1 |
