Пзобретение относится к области Преобразования и кодирования информации.
Известны преобразователи угол - частота, содержащие частотные датчики, помещенные в магнитную систему, и магнитные контуры.
Указанные преобразователи обладают низкой точностью и не позволяют раздельно определять сигналы но трем осям.
Предложенный преобразователь отличается от НЗвестных тем, что в нем .магнитные контуры .расположены о:ртогонально друг к другу, одноименные магнитные контуры в зоне частотных датчиков соединены электрически последовательно, а оба датчика охвачены общим измерительным магнитным контуром. Это позволяет повысить точность и функциональные возможности преобразователя.
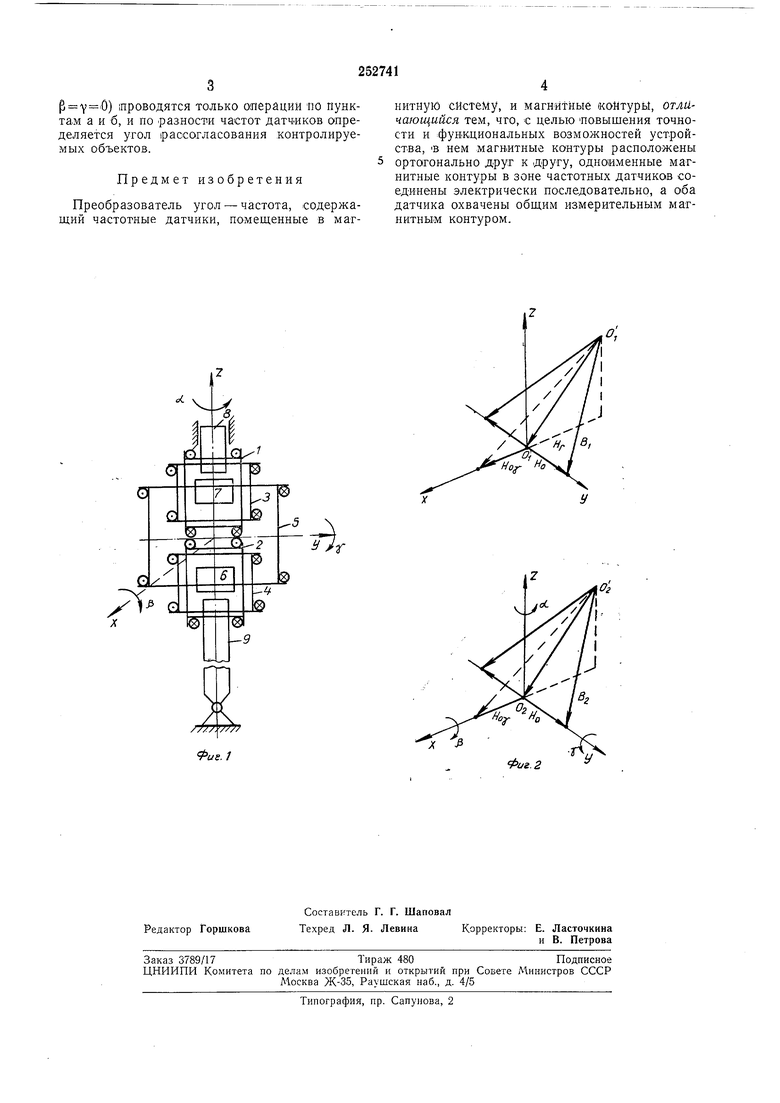
Предложенный преобразователь по-казан на фиг. 1.
Преобразователь содержит два частотных датчика И нять магнитных контуров. Для создания в зоне датчиков одинаковых магнитных полей, одноименные контуры / и 2, 3 и 4 включены последовательно. Коптур 5 используется лишь в преобразователе, где по техническим условиям возможны заметные угловые перемещения по каналам PHY (напр/имер, из-за неидеальности опор конструкции ил.н недостаточной жесткости оснований).
равномерного ноля, где линейные смещения датчиков оказываются несущественными. При повороте валов 8 и 9 изменяются соответствующие векторы ;поля. Так как значения векторов определяют значения частот датчиков 6 и 7, то при угловых перемещениях появляется определенная разность частот, которая является мерой этих перемещений.
Контуры /, 2 и 3, 4 включаются поочередно программным блоком системы.
На фиг. 2 изображена векторная диаграмма к принципу действ)Я преобразователя.
Работа преобразователя в наиболее сложном случае, .при измерении все.х углов а, р, у, состоит из эталон:
а)включение ноля Яо (, Яо, -векторы вспомогательных полей, создаваемых .поочередно в горизонтальной плоскости);
б)измерение разности векторов Si и S, результирующих полей по частотам датчиков 6 и 7;
в)включение дополнительного поля по оси Z;
г)измерение измененной разности векторов Si и В по частотам на выходе датчиков;
) шроводятся только операции «о пунктам а и б, и по разности частот датчиков определяется угол рассогласования контролируемых объектов.
Предмет изобретения
Преобразователь угол - частота, содержащий частотные датчики, помещенные в магнитную систему, и магнитные коМтурЫ, Отличающийся тем, что, с целью повышения точности и функциональных возможностей устройства, В нем магнитные контуры расположены ортогонально друг к другу, одноименные магнитные контуры в зоне частотных датчиков соединены электрически последовательно, а оба датчика охвачены общим измерительным магнитным контуром.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРЕОБРАЗОВАТЕЛЬ АНАЛОГ-ЧАСТОТА | 1973 |
|
SU365831A1 |
| УСТРОЙСТВО для КОРРЕКЦИИ НАПРАВЛЕНИЯ ОСИ | 1970 |
|
SU278256A1 |
| СПОСОБ ИЗМЕРЕНИЯ ВАРИАЦИЙ СОСТАВЛЯЮЩЕЙ НАПРЯЖЕННОСТИ МАГНИТНОГО ПОЛЯ | 1972 |
|
SU332403A1 |
| Устройство для измерения медленно изменяющегося магнитного поля с автоматической стабилизацией амплитудной характеристики | 1973 |
|
SU455302A1 |
| УСТРОЙСТВО для ИЗМЕРЕНИЯ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 1970 |
|
SU279195A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО КОНТРОЛЯ ПАРАМЕТРОВ ОБЪЕКТОВ | 1970 |
|
SU259482A1 |
| ЧАСТОТНЫЙ ДАТЧИК | 1968 |
|
SU211364A1 |
| СПОСОБ И УСТРОЙСТВО ДИСТАНЦИОННОГО ГРАВИМЕТРИЧЕСКОГО ЗОНДИРОВАНИЯ | 2014 |
|
RU2581076C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАГНИТНОГО ПОЛЯ, ПРОНИКАЮЩЕГО В ЭКРАН КВАНТОВОГОПРЕОБРАЗОВАТЕЛЯ | 1972 |
|
SU428319A1 |
| ИЗМЕРИТЕЛЬ МАГНИТНОГО ПОЛЯ С АЕТОА1АТИЧЕСКОЙ СТАБЕ/ЗЛИЗАЦИЕЙ КРУТИЗНЫ ПРЕОБРАЗОВАНИЯ | 1971 |
|
SU304527A1 |
.;
Л э
Фиг. 2
