Настоящее изобретение относится к области физики, в частности к гравиметрии, и может быть использовано при проведении геофизических исследований, результаты которых востребованы в астрономии, геодезии и геологии при проведении геофизических работ.
Известен динамический способ дистанционного гравиметрического зондирования Земли, описанный в источнике http://osmangravi1y.far.ru/osnovproekt.htm, который реализуют посредством измерения орбиты находящегося в невесомости центра масс спутника, перемещающегося в эквипотенциальной (далее - уровневой) поверхности. Траектория спутника за длительное время описывает поверхность, близкую к сфере, геометрия которой связана с геометрией уровенной поверхности гравитационного потенциала на высоте движения спутника. При этом начало геоцентрических координат расположено в центре масс Земли, а ось Z совпадает с ее осью вращения. Повышение точности измерений осуществляют посредством измерения градиентов в разных вариантах на высоте движения спутника (например, используют систему спутник - спутник) и вычисляют потенциальную характеристику поля. Вычитая из полученной сферы значения нормального поля, характеризующего гравиметрическую фигуру Земли, рассчитанную для нормальной траектории движения спутника, получают аномалию ускорения свободного падения ±Δgz, которую проецируют на поверхность геоида. Геоид определяют как уровенную поверхность, совпадающую со средней поверхностью океана, не возмущенную приливами, волнами и течениями. Достигнутое разрешение спутниковой гравиметрии составляет 25 км и не может характеризовать объекты в недрах Земли меньших размеров, информация о которых востребована во многих областях науки и народного хозяйства.
Наиболее близким по совокупности существенных признаков к заявленному изобретению является динамический способ и реализующее его устройство, предназначенные для измерения ускорения свободного падения gz и его составляющих по направлениям gφ на пункте наблюдения, расположенном на поверхности Земли, описанные в патенте RU 2504803 (заявки RU 2011147512 и WO 2013/077771).
Способ заключается в том, что ускорение gz дополняют мерой сравнения - значением центростремительного ускорения ац и регистрируют угловую скорость вращения ω в интервале времени, в котором модули радиус-векторов gz и ац в верхней точке траектории равномерного вращения пробной массы равны и разнонаправлены и пробная масса находится в невесомости. По угловой скорости вращения со вычисляют значения ускорения свободного падения gz=ω2R. Способ динамический - единицей измерения является время (сек).
Одновременно регистрируют значения составляющих по направлениям gφ в виде мгновенных значений сигнала гравиметрического датчика (далее потенциал-датчика), преобразующего силу, действующую на пробную массу датчика m(gφ±ац), в электрический сигнал. В результате получают потенциальную характеристику напряженности гравитационного поля в плоскости вращения датчика, охарактеризованную в условных единицах, в виде полярного графика 360° - кардиоиды gφ. Серия кардиоид по разным азимутам ориентации плоскости вращения с общим вектором gz, после вычитания значения меры сравнения ац, характеризует 3D-годограф gφ - сферу, отображающую распределение гравитационного потенциала на пункте наблюдения, расположенном на земной поверхности. Сопоставляя наблюденный 3D-годограф gφ с «нормальным 3D-годографом gφ», представляющим правильную сферу, выявляют аномальные отклонения ±Δgφ. Нормальный 3D-годограф gφ в любой плоскости вращения с вектором gz - полярный график 0-180°, рассчитанный по формуле gφ=gzcosφ, имеет общий полюс «0» с кардиоидой и соответствует однородному полупространству на пикете наблюдения. Измерения выполняют измерительной установкой, содержащей потенциальный и ноль-индикаторный датчики с пробными массами и пьезоэлектрическими преобразователями, установленными на диске в координатном устройстве с возможностью вращения. Устройство обеспечивает проведение измерений с постоянной угловой скоростью ω вращения датчиков по заданным азимутам вращения.
Недостатком способа является то, что измеряют абсолютные значения модулей радиус-векторов по направлениям gφ относительно нулевого значения в полюсе, которые превышают значения выявляемых аномалий в 108 и более раз, что не может обеспечивать высокой точности измерений.
Задачей, на решение которой направлено изобретение, является разработка способа и усовершенствование устройства, повышающее точность и информативность гравиметрических измерений на земной поверхности и других планет.
Поставленную задачу решают способом дистанционного гравиметрического зондирования, который реализуют на пунктах наблюдения (ПК), расположенных на земной поверхности (или иной планеты). В комплекс измерений входит определение результирующего вектора ускорения свободного падения gz, его составляющих по направления gφ и определение пространственного положения плотностной неоднородности в недрах, охарактеризованной на поверхности аномалией.
Определение gz осуществляют посредством измерения угловой скорости ω равномерного вращения ноль-индикаторного датчика по траектории постоянного радиуса. Измеряют время Т сек полного оборота ноль-индикаторного датчика и вычисляют угловую скорость ω=2π/Т - рад/с. Угловую скорость измеряют в интервале времени, в котором векторы gz и ац в верхней точке траектории вращения пробной массы датчика равны между собой, разнонаправлены и пробная масса находится в невесомости. При этих условиях центростремительное ускорение ац компенсирует ускорение свободного падения gz в одной верхней точке траектории. По угловой скорости вычисляют значение ускорения свободного падения gz=ац=ω2R, где R=const - радиус вращения ноль-индикаторного датчика.
Определение составляющих результирующего вектора по направлениям gφ осуществляют посредством измерения градиента напряженности гравитационного поля по траектории вращения градиент-датчика, которым оснащают измерительное устройство. Измерения осуществляют в условных единицах мгновенных значений непрерывного потока частотного электрического сигнала и последующего вычисления потенциальных значений ее точек. Выполняют измерения в сферических координатах (gφ, θ, φ) с началом координат в центре вращения градиент-датчика. Где: gφ - модуль вектора ускорения свободного падения gz по направлению φ, определенный в условных единицах разности частоты: φ - зенитный угол; θ - азимутальный угол плоскости вращения с векторами gφ и gz. Ось X направлена по меридиану точки наблюдения в северном направлении. При этом сила F=m(gφ±ац), действующая на каждую пробную массу m1 и m2 градиент-датчика, на всей траектории направлена по радиусу в центр вращения пробных масс, расположенный на оси вращения устройства, а вектор ускорения свободного падения gz направлен в центр масс Земли. Тангенциальная составляющая ускорений при равномерном вращении отсутствует. При этом используют многоканальный частотный компаратор или прецизионный частотомер, стабилизированный стандартным сигналом спутниковых систем ГЛОНАСС/GPS. Градиент-датчик имеет две пробные массы, установленные на пьезоэлектрических преобразователях, равноудаленных от центра вращения и смещенных относительно друг друга на расстояние L=const. График градиента характеризуют средними дискретными значениями разности частоты в точках, равномерно распределенных по траектории вращения, которые вычисляют в пределах установленного интервала усреднения. Детальность графика градиента увеличивают, уменьшая размеры интервала усреднения и увеличивая количество дискретных значений по траектории вращения. По результатам измерения в прямом и обратном направлении вращения градиент-датчика вычисляют средние дискретные значения, характеризующие точки графиков градиента кардиоиды в заданном азимуте плоскости вращения. Последовательно суммируют усредненные дискретные значения градиента с шагом, которым проведены измерения градиента, и вычисляют средние дискретные значения точек кардиоиды в относительных единицах. Из полученной кардиоиды вычитают значение меры сравнения ац и получают измеренный годограф gφ по направлениям. Сопоставляя измеренный годограф gφ с «нормальным годографом», рассчитанным по gφ=gzcosφ, выявляют аномальные интервалы годографа ±Δgφ. Положительными значениями +Δgφ характеризуют аномальные интервалы с избыточной плотностью неоднородности. Отрицательными значениями -Δgφ - аномалии с меньшей плотностью неоднородности относительно вмещающих пород и аномалии, вызванные влиянием планет. Границы локального аномального интервала на годографе gφ лежат в пределах сектора с вершиной в центре вращения градиент-датчика. Аномальный интервал на годографе характеризуют центральным углом и осью аномального интервала с вектором аномалии r. По серии измерений в разных азимутах вращения диска устанавливают углы азимутальных границ исследуемой аномальной неоднородности в недрах. Детализируют выявленную аномальную неоднородность посредством проведения измерений в дополнительных плоскостях вращения, уточняют границы аномальной области и положение результирующего вектора гр.
Каждое направление φ 3D-кардиоиды охарактеризовано двумя радиус-векторами, лежащими на оной прямой с общей точкой «0». Как сумма gφ+ац в нижней части траектории вращения градиент-датчика, и как разность gφ-ац в верхней части траектории вращения. Объединяют аномальные интервалы в нижней и верхней частях траектории вращения.
Объединение аномалий интервалов выполняют посредством проецирования аномальных приращений на нормальный годограф gφ и суммирования их модулей. Это увеличивает рельефность аномалии и, соответственно, повышает качество измерений. По серии годографов с аномальными интервалами определяют результирующий вектор аномальной области rр на 3D-годографе gφ. Пространственное положение результирующего вектора rр аномальной области на 3D-годографе gφ характеризуют в сферических координатах (r, Θ, φ) с началом координат в центре вращения пробных масс градиент-датчика.
Определяют цену условной единицы измерения k между средним значением ускорения свободного падения gz, например, наногал, и средним значением условной единицы разности частоты Δf1-2, которыми охарактеризован результирующий вектор gz. Для этого вычисляют частное от деления значения gz в наногалах на значение gz в условных единицах. По коэффициенту пропорциональности к пересчитывают значения модулей аномальных приращений ±Δgφ, модуля результирующего вектора аномалии rр и его проекции на уровенную плоскость ХОУ и ось Z в дольные единицы ускорения свободного падении - наногал.
Способ дистанционного гравиметрического зондирования реализуют посредством определения пространственного положения и геометрических параметров плотностной неоднородности, охарактеризованной на поверхности Земли гравиметрической аномалией. При этом определяют координаты центра масс неоднородности посредством установления местоположения точки пересечения осевых линий с результирующими векторами аномалий rp, определенными на нескольких пунктах наблюдения, расположенными на разных расстояниях относительно центра масс неоднородности. Контуры неоднородности в земных недрах определяют посредством проецирования границ аномальных интервалов 3D-годографа gφ по направлению центра масс в земных недрах, и отображают на схематических разрезах и планах, выполненных в принятом масштабе. В итоге получают объемный контур области неоднородности, общий для нескольких секторов, определенный на разных пунктах наблюдения в виде пространственной идеализированной модели. Характерные сечения модели отображают на карте и разрезах с геологической информацией. При интерпретации результатов работ анализируют изменения формы и площади аномальной области на 3D-годографах gφ от одной точки наблюдения к другой, изменение пространственного положения результирующего вектора rр и его проекций от пункта к пункту наблюдения, их значений и другие признаки.
Устройство содержит два потенциал-датчика, формирующих градиент-датчик, и ноль-индикаторный датчик, установленные на диске в координатном устройстве с возможность вращения диска. Термин «потенциал-датчик» применен для обозначения способа измерения, обеспечивающего проведение измерений относительно нулевого значения потенциала в общем полюсе «0», принадлежащим кардиоиде и годографу gφ. Координатное устройство обеспечивает вращение диска в плоскостях, ориентированным по разным азимутам с общей координатной осью Z, с постоянной угловой скоростью ω, постоянным радиусом вращения R датчиков в прямом и обратном направлении вращения. Устройство оснащено прецизионными секундомером и компаратором стабилизированными стандартным сигналом ГЛОНАСС/GPS, усилителем, компьютером, системой управления производством измерений, системой терморегуляции. Ноль-индикаторный датчик и градиент-датчик оснащены независимыми измерительными каналами и подключены к многоканальному частотному компаратору. Градиент-датчик характеризуют «плечом» - расстоянием между центрами масс датчиков L, имеющим постоянную величину. Установку оснащают несколькими градиент-датчиками, имеющими разные значения L.
В основе решения поставленной задачи лежат известные из теории гравиразведки, метрологии и практического применения способы измерения гравитационного поля, описанные в источниках. В частности:
1. Из источника http://osmangravity.far.ru/osnovproekt.htm известен способ спутникового дистанционного гравиметрического зондирования при исследовании глобального гравитационного поля Земли. Способ реализуют посредством измерения радиуса вращения центра масс спутника относительно центра масс Земли. Значения радиуса R изменяется под действием изменяющихся значений ускорения свободного падения gz на земной поверхности. При этом центр тяжести спутника постоянно находится в невесомости под действием центробежного ускорения, компенсирующего ускорение свободного падения gz. По физической сущности центробежное ускорение ац является мерой сравнения, которую рассчитывают по формуле ац=ω2R=v2/R, где v - мгновенная линейная скорость спутника. Определяют параметры движения спутника по орбите, в том числе: мгновенное значение линейной скорости v и ускорения, радиус вращения R и координаты спутника. Одновременно определяют параметры геоида, где используют методы альтиметрии, принцип работы которой основан на измерении времени прохождения электромагнитного излучения. В качестве средства измерения применяют атомные часы, обеспечивающие измерение времени с точностью 10-14-10-15 сек. Результаты измерений получают в геоцентрических координатах, с началом координат в центре масс земли. В течение времени радиус-вектор траектории вращения центра масс спутника характеризует уровненную поверхность, близкую к сфере, отображающую распределение гравитационного потенциала земли на высоте его движения. Сопоставляют измеренную сферу с расчетными значениями нормальной гравиметрической фигуры земли на высоте движения спутника, вычисляют аномалию ±Δgz, представленную разностью между измеренными значениями gz и расчетными значениями. Аномалию проецируют по направлению радиуса вращения на поверхность геоида.
Материалы спутникового зондирования Земли отображают топографию границы ядра с мантией, аномальные плотности в нижних частях мантии, особенности строения океанического дна, рельеф фундамента, кольцевые и линейные течения вод океана, крупные плотностные неоднородности в недрах Земли и ряд других физических параметров.
2. Из патента на изобретение RU 2504803 (Заявка RU 2011147512 и WO 2013/077771) известен способ и устройство, предназначенные для измерения ускорения свободного падения gz и его составляющих по направлениям gφ на пикете наблюдения, расположенном на поверхности земли. Способ заключается в том, что значение ускорения gz дополняют мерой сравнения - значением центростремительного ускорения ац (то же что компенсация силы тяжести центробежным ускорением). Прецизионным секундомером измеряют угловую скорость ω (рад/с) равномерного вращения потенциал-датчика по круговой траектории постоянного радиуса в интервале времени, в котором модули радиус-векторов gz и ац в верхней точке траектории равномерного вращения пробной массы равны и разнонаправлены. По угловой скорости вычисляют значение центростремительного ускорения (меру сравнения) по формуле: ац=ω2R смс-2, ω=2πТ, где Т, сек - время полного оборота датчика, R - постоянный радиус вращения ноль-индикаторного датчика. Значение ускорения свободного падения рассчитывают по формуле: ац=gz=ω2R смс-2, где R, см = const. При проведении измерений в условиях постоянной угловой скорости вращения, тангенциальная составляющая ускорения отсутствует.
Определение модулей радиус-векторов ускорения по направлениям gφ=gzcosφ±ац выполняют посредством измерения результирующих векторов gφ±ац в плоскости вращения. Измерения выполняют посредством преобразования силы m(gφ±ац), действующей на пробную массу пьезоэлектрического датчика, в частотный электрический сигнал. Получают полярный график 360° в условных единицах с полюсом «0» в виде кардиоиды, который отображает распределение гравитационного поля на пикете наблюдения. Определение времени Т полного оборота ноль-индикаторного датчика выполняют в интервале времени, в котором gz=ац. При этом каждое направление φ кардиоиды характеризуют двумя значениями точек кардиоиды gφ±ац. Серия кардиоид, определенная по разным плоскостям вращения, с общим вектором gz характеризует 3D-кардиоид. Вычитают из 3D-кардиоида gφ значение модуля центростремительного ускорения ац (меру сравнения), и получают наблюденную 3D-годограф gφ сферу, охарактеризованную результирующим радиус-вектором gz и радиус-векторами по направлениям gφ. В результате сравнения 3D-годографа с нормальным годографом gφ, рассчитанным по формуле gφ=gzcosφ, выявляют аномальные отклонения ±Δgφ. 3D-годограф и 3D-кардиоида имеют общие полюс «0» и ось симметрии gz, лежащие на линии отвеса.
Из сопоставления приведенных выше характеристик способов 1. и 2. видна общность действующих физических законов и способов интерпретации полученных материалов, заложенных в их основе, с отличительными особенностями, зависящими от места расположения центра вращения пробной массы относительно центра масс исследуемого объекта, и, соответственно, начала координат. Это позволяет использовать раннее не использованную возможность повышения точности измерений на пикете наблюдения, посредством измерения градиента по траектории вращения градиент-датчика и последующего вычисления пространственной характеристики гравитационного поля.
3. Из ист. «Мир электроники, Дж. Фрайден, Современные датчики, Справочник, 2005» известен кварцевый датчик силы с использованием пьезоэффекта. Датчик обладает хорошей линейностью и одиннадцатиразрядным разрешением, имеет частотный выходной сигнал.
4. Из ист. tp://future24.ru/fiziki-poluchili-gigantskii-fleksoelekricheskii-effekt известен датчик, содержащий пленку из HoMnO3 на сапфировой подложке. Флексоэлектрический эффект в полученном материале на 6-7 порядков мощнее, чем тот, который регистрируют при деформации оксидов.
5. Из ист. http://www.findpatent.ru/patent/223/2236753.html известен приемник-компаратор, предназначенный для определения относительной отстройки частоты опорных генераторов и стандартов частоты и времени, а также для синхронизации частоты генератора по принимаемым сигналам спутниковых радионавигационных систем ГЛОНАСС/GSP и синхронизированным с системной шкалой времени. Относительная погрешность измерения относительной отстройки частоты опорного генератора за 24 часа составляет +1×10-12.
6. Из ист. http://www.vremya-ch.com/rassian/product/indexaDb.html?Razdel=2&Id=20 известен многоканальный компаратор VCH-315, предназначенный для прецизионных измерений частоты. Компаратор имеет погрешность при времени измерения 1 с - ≤1,5×10-13 и разрешающую способность измерения относительной разности частот 1,0×10-14. Число измерительных каналов 8.
7. Известны способы повышения точности проводимых измерений, например, изложенные в ист.
http://metrologu.ru/info/metrologia/izmereniya/metody-povyshema-tochnosti-izmereniy, предусмотренные изобретением:
- контроль метрологических параметров установки осуществляют непосредственно на пикете наблюдения в условиях постоянной скорости вращения пробной массы в уровенной поверхности. При этом гравиметрические датчики регистрирует только центростремительное ускорение ац;
- усреднение изменяющегося потока частотного сигнала в пределах интервала дискретизации посредством разделения потока информационного сигнала на дискретные интервалы и усреднения лежащих в его пределах зарегистрированных значений с получением единственного дискретного отсчета;
- выполнение многократных измерений значения градиента с последующим усреднением результатов при прямом и обратном направлении вращения датчиков и вычисление средних значений;
- автоматизация измерительных процедур и обработки результатов измерений;
- использование частотного компаратора, реализующего определение показаний гравиметрических датчиков по относительной разности частот выходных сигналов градиент-датчика. При этом компаратор стабилизируют стандартными частотами спутниковых систем ГЛОНАСС/GPS;
- измерение времени посредством прецизионного секундомера, стабилизированного спутниковым стандартным сигналом.
Использование в изобретении перечисленных способов обеспечивает высокую точность измерений.
Полученный технический результат заключается в проведении дистанционного гравиметрического зондирования земных недр (в том числе других планет) с получением пространственной характеристикой гравитационного поля на пункте наблюдения. При аттестованном значении R способ позволяет проводить измерения в абсолютных единицах. Способ не имеет ограничений по диапазону измеряемых значений ускорения свободного падения. Определение пространственных характеристик в единицах измерения ускорения свободного падения и дистанционное зондирование земных недр являются новыми свойствами, расширяющими возможности гравиметрии. Способ и устройство целесообразно использовать при детализации гравиметрических аномалий с определением качественных, а в благоприятных условиях и количественных, параметров исследуемых объектов, мониторинге отрабатываемых газовых и нефтяных месторождений, мониторинге очагов вулканической деятельности, сейсмологии, исследовании карстовых пустот и решении других геолого-геофизических задач, а также задач метрологии и геодезии.
Автору не известны технические решения с отличительными признаками предлагаемого технического решения.
Сущность изобретения поясняется чертежами.
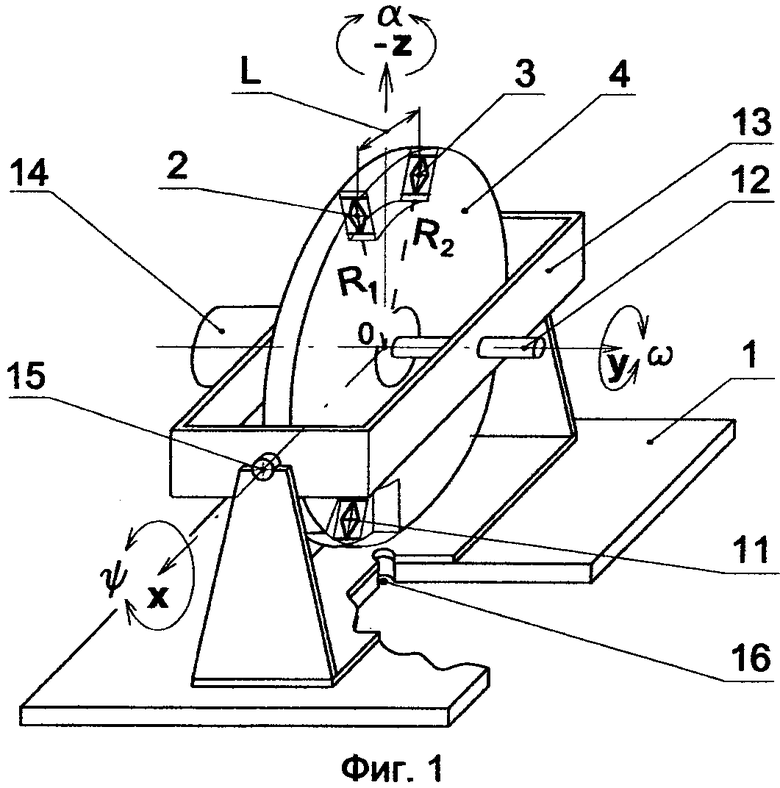
На фиг. 1 приведено схематическое изображение устройства 1 измерения ускорения свободного падения gz и его составляющих gφ.
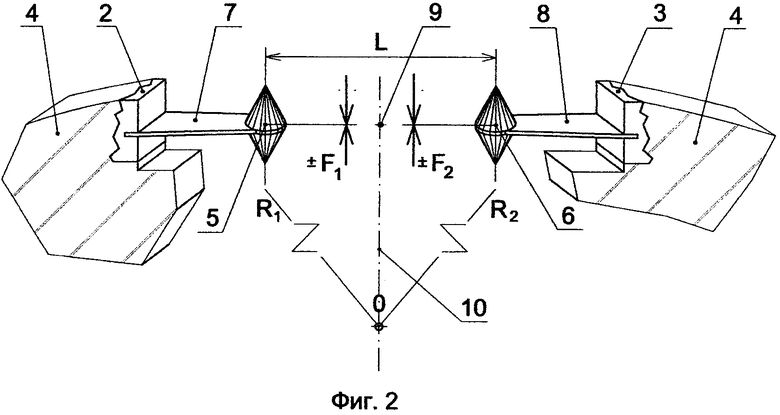
На фиг. 2 приведено схематическое изображение градиент-датчика, где 5 и 6 - пробные массы градиент-датчика, 7 и 8 - пьезоэлектрические преобразователи, 10 - ось симметрии градиент-датчика.
На фиг. 3 представлена кардиоида 18 (0-360°) и годограф gφ по направлениям 33 (0-180°) с палеткой 28 для построения графика кардиоиды и выполнения обратной задачи - определения градиента кардиоиды. Точка 0 является общим полюсом для кардиоиды 18 и годографа 33. Полюс «0» является центром вращения градиент-датчика и ноль-индикаторного датчика. Потенциальные окружности 29 палетки 28 проведены через концы радиус-векторов gφ±ац. Окружность 32 - ось радиусной симметрии палетки 28. Внешняя окружность палетки 28 - условная траектория вращения градиент-датчика. L - «плечо» градиент датчика равное 15°. Интервалы а-b и a1-b1 - аномальные интервалы кардиоиды 18.
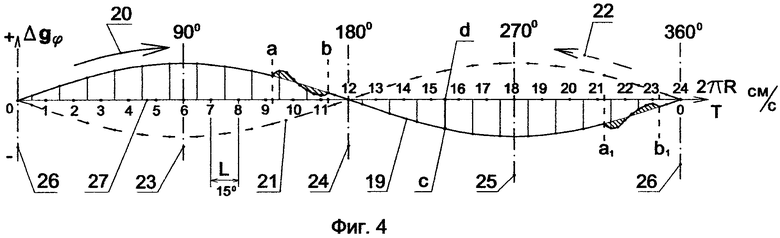
На фиг. 4 приведены нормальные кривые градиента кардиоиды 18, построенные для правого 20 и левого 22 направления вращения градиент-датчика. Аномальные интервалы а-b и a1-b1 на графике 19 построены для правого вращения 20 градиент-датчика. Т сек - время полного оборота градиент датчика 360°. 23, 24, 25, 26 и абсцисса 27 - оси симметрии графиков градиента.
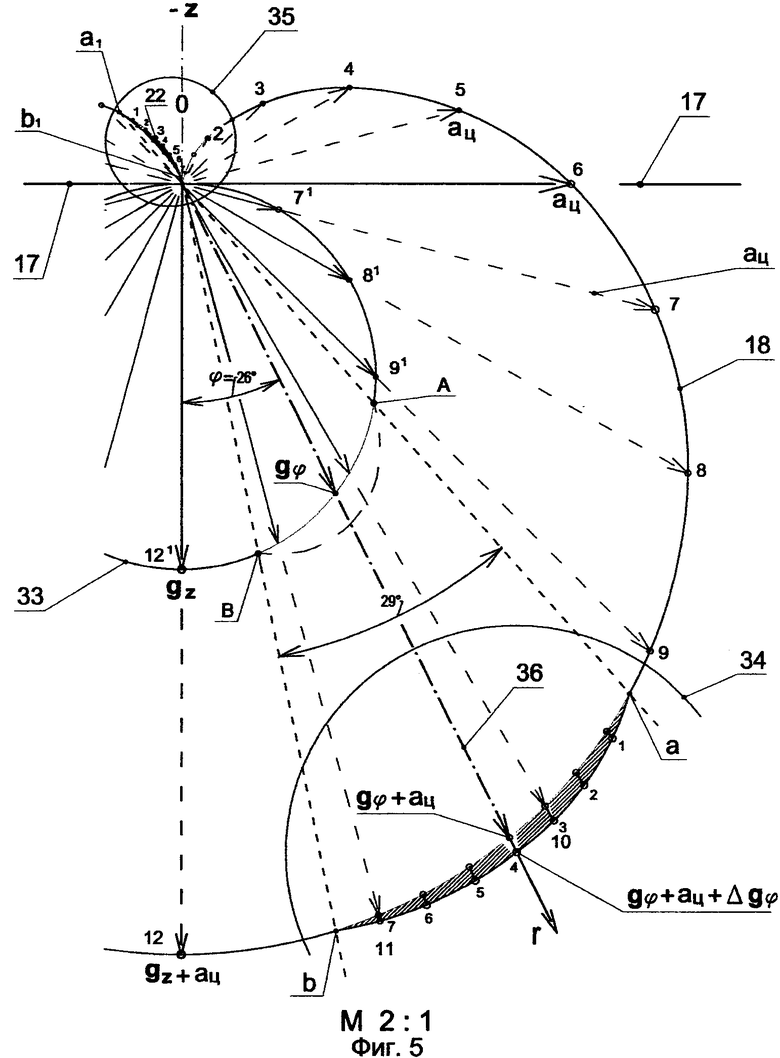
На фиг. 5 приведена 
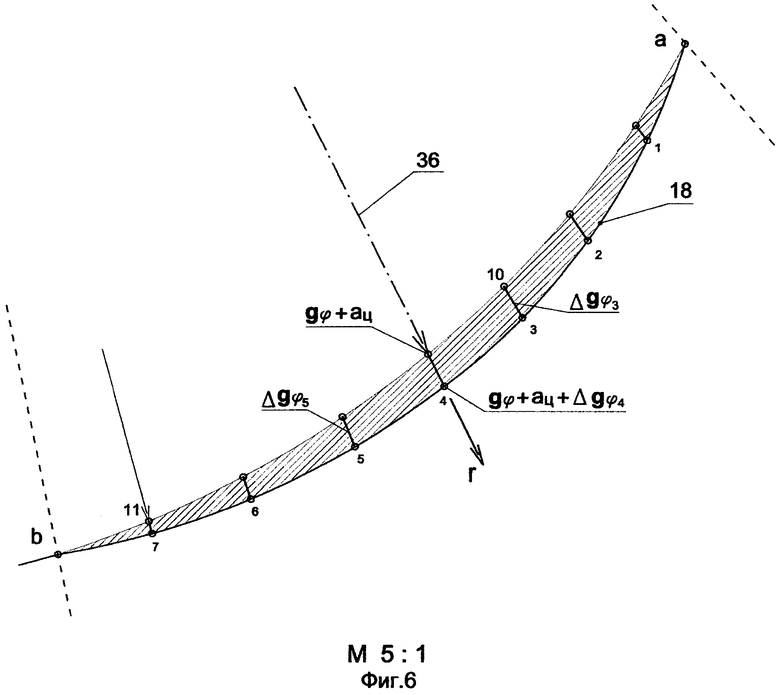
На фиг. 6 приведен фрагмент 34 с аномальным интервалом а-b кардиоиды 18 в нижнем полупространстве в масштабе 5:1.
На фиг. 7 приведен фрагмент 35 кардиоиды в верхнем полупространстве с аномальным интервалом a1-b1 в масштабе 10:1.
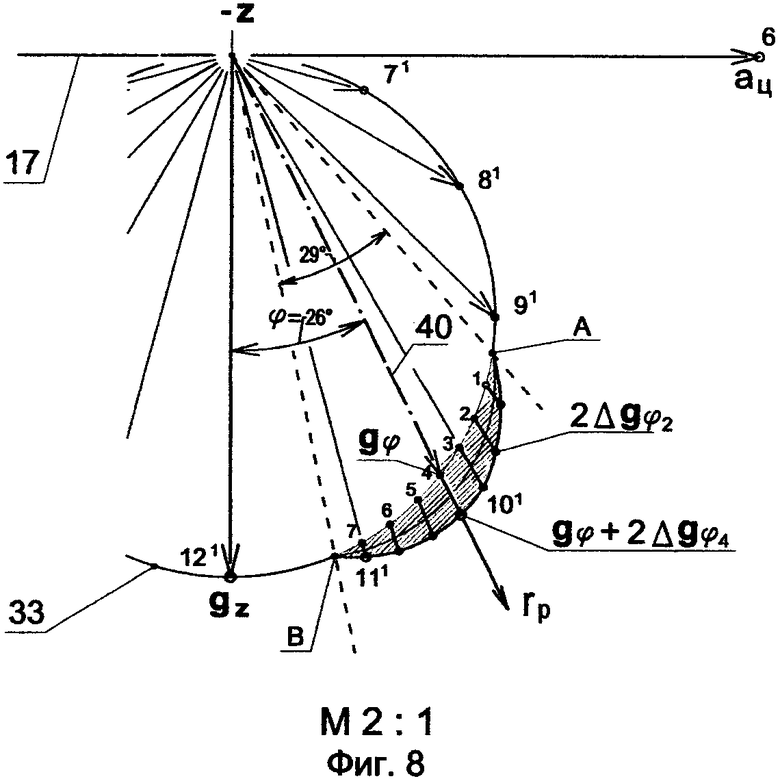
На фиг. 8 приведен фрагмент годографа с аномальным интервалом А-В, представленным значениями 2Δgφ, в виде суммы значений верхнего и нижнего аномальных интервалов кардиоиды.
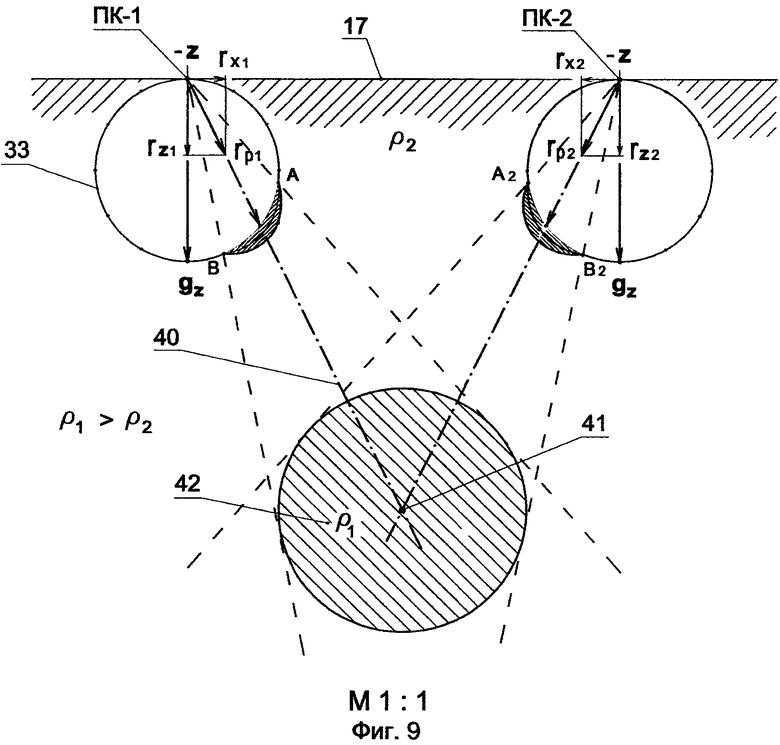
На фиг. 9 приведен пример определения местоположения геометрических параметров избыточной плотностной неоднородности в земных недрахг Где ρ1 - плотность неоднородности, вызвавшая аномалию на поверхности; ρ2 - средняя плотность вмещающих пород; ПК - пункт наблюдения.
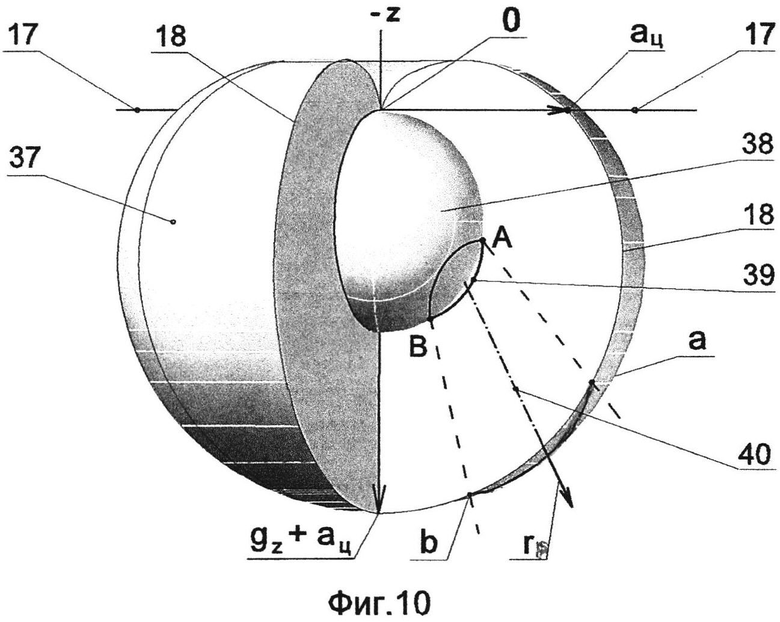
На фиг. 10 приведен макет 3D-кардиоиды gφ с 3D-годографом. 3D-кардиоида - потенциальная поверхность, представленная значениями радиус-векторов gφ±ац.
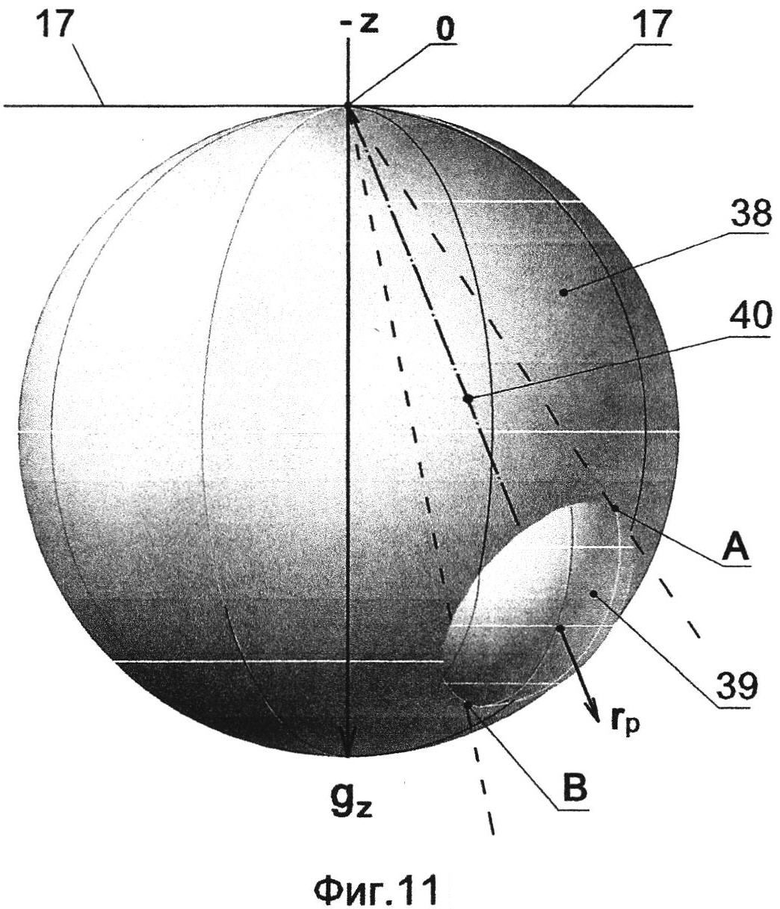
На фиг. 11 приведен макет 3D-годографа gφ с аномальной областью, охарактеризованной результирующим вектором rp. 40 - ось аномальной области на 3D-годографе.
Устройство 1 на фиг. 1 дистанционного гравиметрического зондирования содержит два идентичных потенциал-датчика 2 и 3, формирующие градиент-датчик на фиг. 2, установленный на диске 4. Градиент-датчик содержит две пробные массы 5 и 6, закрепленные на пьезоэлектрических преобразователях 7 и 8, которые установлены на диске 4 без возможности перемещения, на расстоянии L между пробными массами. На диске 4 фиг. 2 точкой привязки значения градиента соответствует точка 9, расположенная на оси симметрии 10 градиент-датчика, равноудаленная по радиусу от центра вращения пробных масс 5 и 6. Градиент-датчик установлен на диске 4 с таким расчетом, чтобы переменная сила F=m(gφ±ац), действовала на пробные массы датчиков 2 и 3 по радиусам R1 и R2. На диске 4 также установлен ноль-индикаторный датчик 11, например, акселерометр с независимым регистрирующим каналом. В качестве ноль-индикаторного датчика может быть использован один из каналов потенциал-датчика 2 или 3, входящего в состав градиент-датчика. Диск 4 установлен посредством оси 12 в координационном устройстве 13 с возможностью вращения. Устройство 1 оснащено приводом принудительного вращения 14, которое обеспечивает вращение диска 4 с заданной постоянной угловой скоростью со в прямом и обратном направлениях. Координатное устройство 13 выполнено с возможностью поворота диска на осях 15 и 16 (ось 16 не показана), что позволяет выполнять измерения в выбранном пространственном положении плоскости вращения диска.
Способ дистанционного гравиметрического зондирования реализуют следующим образом. Устройство 1 устанавливают на пункте наблюдения (ПК) и плоскость диска 4 размещают в уровенной поверхности 17 - ХОУ на фиг. 1. При остановленном диске измерительные каналы устройства регистрируют собственную частоту пьезоэлектрических преобразователей fo градиент-датчика 2 и 3. Проводят контроль метрологических параметров измерительных каналов устройства. Определяют градуировочную характеристику измерительных каналов в диапазоне рабочего интервала угловой скорости вращения. Измерения выполняют в условных единицах мгновенных значений разности частоты Δfω, где Δfω - измеренная разность частоты между значением выходного сигнала датчика при скорости вращения ω. Измерительные каналы устройства при нахождении градиент-датчика с диском в уровенной плоскости не регистрирует внешних сил, действующих на его пробные массы - регистрирует собственную частоту датчиков - fo. Диск 4 приводят во вращение и, ступенчато изменяя скорость вращения, устанавливают зависимость условной единицы частотного электрического сигнала от угловой скорости ω в диапазоне рабочего интервала угловой скорости вращения, равно 2ац. При этом частоту компаратора fk синхронизируют стандартным сигналом спутниковых радионавигационных систем ГЛОНАСС/GPS. Измерения выполняют в прямом и обратном направлении вращения диска 4 и вычисляют средние дискретные значения на выбранных режимах скорости вращения. По результатам измерений строят градуировочные графики (не показаны), определяют их линейность в диапазоне рабочих скоростей устройства, равного 2ац, и погрешности. При выявлении остаточного дисбаланса, зарегистрированного датчиками в уровенной плоскости вращения, устанавливают причину. Если устранить дисбаланс невозможно, его значение учитывают при обработке результатов измерений. Все измерения проводят в автоматическом режиме.
Диск 4 фиг. 1 устанавливают в плоскость с линией отвеса и приводят во вращение. Определяют потенциальную характеристику гравитационного поля в составе ускорения свободного падения gz и его составляющих по направлениям gφ в плоскости вращения диска 4. Измерения gz и gφ проводят в интервале времени, в котором показания измерительного канала ноль-индикаторного датчика 11 на фиг. 1, находящегося в верхней точке траектории, равны собственной частот пьезоэлектрического преобразователя. Измерения выполняют в сферических координатах (gφ, Θ, φ), с началом координат в центре вращения пробных масс датчиков, с координатной осью Z, совпадающей с линией отвеса, и осью X, направленной в северном направлении по меридиану точки наблюдения.
При определении gz измеряют время Т сек полного оборота ноль-индикаторного датчика в прямом и обратном направлении равномерного вращения диска 4. При этом количество оборотов диска должно быть не менее двух. По среднему значению времени Т сек вычисляют значение угловой скорости ω и по нему определяют значение ускорения свободного падения gz=ω2R см·с-2, где R см = const - радиус вращения ноль-индикаторного датчика. За единицу ускорения свободного падения gz в гравиметрии принят миллигал (мГал), равный 10-5 м·с-2 и его дольные единицы. Например, время полного оборота Т сек ноль-индикаторного датчика с радиусом вращения 20 см при определении gz на полюсе, где значение gz=983200 мГал, Т составит 0,898515221 с (вычислено по формуле: Т=2π/ω=2π/√gz/R). На экваторе gz равно 978000 мГал, Т=0,896136014 с. Таким образом, диапазон времени при измерениях на поверхности Земли, составляет 2379207 нс (898515221-896136014). Диапазон значений gz на поверхности Земли составляет 983200-978000=5200 мГал. Разделив диапазон gz на диапазон измеряемого времени полного оборота Т, определяют точность выполняемых измерений. Например, измерение времени с точностью 1 нс (1·10-9 с) обеспечивает измерение gz с точностью около 2,2 нГал. Современные средства измерения времени и частоты обеспечивают точность более 10-12, что уверенно перекрывает наносекундный диапазон. Таким образом, способ позволяет повысить точность измерений на несколько порядков и определять значения ускорения свободного падения gz и его составляющих по направлениям gφ с требуемой точностью. В значение gz вводят поправки и определяют погрешности измерений. Определение результирующего вектора gz выполняют относительно опорных гравиметрических пунктов с известными значениями gz, а при аттестованном значении R измерения выполняют в абсолютных единицах.
Одновременно с определением gz измеряют градиент кардиоиды 18 (фиг. 3 и фиг. 5) по траектории вращения градиент-датчика в условных единицах разности частоты Δf1,2=f1-f2, с выходными частотными сигналами пьезодатчиков f1 и f2. При этом измерительные каналы устройства регистрируют непрерывный поток высокочастотного цифрового сигнала. Каждый интервал кардиоиды 18, лежащий в пределах одного градуса, характеризуют многими сотнями мгновенных значений, при достаточной характеристике 1-2 значения. Поэтому график градиента характеризуют дискретными значениями разности частоты в точках кардиоиды, равномерно распределенными по траектории вращения в пределах установленного интервала усреднения. Точкой зарегистрированного дискретного значения градиента кардиоиды 18 являются координаты φ в плоскости вращения Θ. На фиг. 4 приведены построенные графическим способом графики градиента 19 - при правом вращении 20, и график градиента 21 - при левом вращении 22. В приведенном примере расстояние L между пробными массами (плечо) градиент-датчика составляет 15° с шагом между точками графика 15°. Графики 19 и 21, за исключением аномальных интервалов а-b и a1-b1, представляют «нормальный градиент» кардиоиды 18 и имеют выраженные особенности, в том числе:
- графики градиента в прямом 19 и обратном 21 направлениях вращения состоят из подобных друг другу 8-модульных интервалов по 90° с осями симметрии 23, 24, 25, 26 и абсциссы 27, а также 4-модульных интервалов по 180° и абсциссы 27;
- точки графика 0 и 12 лежат на линии отвеса с результирующим вектором gz. Градиент в точках 0 и 12 (φ=0 и 180°) равен 0 и не определяется;
- точки 6 и 18 охарактеризованы максимальным значением градиента, являются точками перегиба графика градиента, принадлежат уровенной поверхности, и охарактеризованы значениями центростремительного ускорения ац.
Графики градиентов 19 и 21 кардиоиды 18 построены с помощью палетки 28 на фиг. 3, выполненной следующим образом. Через точки расчетной кардиоиды, соответствующие концам радиус-векторов gφ=gzcosφ±ац (точки кардиоиды 1, 2…23 на фиг. 3), проведены потенциальные окружности 30 с центром в полюсе «0» кардиоиды 18. Между окружностями 29 проведены обозначенные тонкими линиями окружности 30, которые определяют геометрическое место привязки значений градиента. Расстояние между окружностями 29 соответствует приращению потенциала (градиенту) по радиусу палетки. Например, длина отрезка с-d на фиг. 3 равна разности потенциалов (градиенту) между концами радиус-векторов 15 и 16 кардиоиды с точкой привязки значения градиента 31. В описанном примере расстояние между точками кардиоиды составляет 15°. Внешняя окружность палетки 28 с угловыми значениями соответствует условной траектории градиент-датчика с центром вращения в полюсе кардиоиды «0». Особенностью палетки является наличие оси «радиусной» симметрии 32 - окружности, с точками 6 и 18, со значениями ац=gz кардиоиды, и вектором gz годографа 33 - точка годографа 121. Программа компьютерной обработки материалов измерений содержит алгоритм палетки.
Детальность графика градиента кардиоиды увеличивают, уменьшая размеры интервала усреднения, и увеличивая количество дискретных значений характеризующих кардиоиду. Например, аномальные интервалы а-b и a1-b1 кардиоиды на фиг. 3, 4 и 5 охарактеризованы девятью дискретными значениями, включая точки границ аномального интервала.
По графикам градиентов 19 и 21 с использованием палетки 28 строят потенциальную характеристику поля на пикете наблюдения - кардиоиду 18, представленную суммой радиус-векторов gφ±ац. Построение кардиоиды выполняют отдельно по каждому направлению вращения градиент-датчика. Последовательно суммируют усредненные дискретные значения градиента от полюса «0» по замкнутому контуру с шагом суммирования равным шагу измерения градиента. В результате получают две кардиоиды, охарактеризованные в условных единицах разности частоты, погрешности которых не ниже погрешностей определения дискретных значений градиента. По полученным кардиоидам в прямом и обратном направлении вращения, вычисляют средние дискретные значения, характеризующие точки измеренной кардиоиды 18.
Каждое направление φ кардиоиды 18, включая результирующий вектор gz, охарактеризовано двумя разнонаправленными радиус-векторами (gφ+ац)+(gφ-ац), лежащими на одной прямой с общим полюсом «0», суммарное значение модулей которых равно 2gz=2ац=gz+ац, куда входят и аномальные приращения Δgφ. На фиг. 5 приведен график ½ кардиоиды 18 с годографом 33 в масштабе 2:1 с заштрихованными аномальными интервалами, обозначенными как фрагменты 34 и 35. За единицу относительного масштаба принят масштаб на фиг. 3. В нижней части кардиоиды 18 аномальный интервал а-b выделен в виде фрагмента 34 и сформирован суммой модулей радиус- векторов gφ+ац+Δgφ,. На фиг. 6 фрагмент 34 приведен в масштабе 5:1. В верхней части кардиоиды аномальный интервал a1-b1 охарактеризован разностью gφ-ац-Δgφ, которая формирует «мнимый» аномальный интервал, обозначенный как фрагмент 35. Аномальный интервал a1-b1 зеркально перевернут в полюсе «0» относительно интервала а-b на фрагменте 34, где полюс играет роль фокуса, переворачивающего изображение. Если не учитывать влияния вертикального градиента, измеренные значения Δgφ в верхнем и нижнем интервалах равны и имеют один и тот же знак. Например, график градиента 19, приведенный на фиг. 4 с аномальными интервалами а-b и a1-b1, охарактеризован одинаковыми значениями Δgφ. Поскольку аномальными интервалами а-b и a1-b1 характеризуют одну и ту же неоднородность, объединяют их значения. Объединение выполняют посредством проецирования аномальных приращений радиус-векторов Δgφ, на нормальный годограф и их суммирования. В результате получают аномальный интервал А-В на годографе 33, охарактеризованный значениями ±2Δgφ, приведенный на фиг. 8. Описанный прием увеличивает рельефность аномального интервала и, соответственно, повышает качество измерений. Границы локального аномального интервала r на годографе gφ лежат в пределах сектора с вершиной в центре вращения градиент-датчика. Аномальный интервал на годографе характеризуют центральным углом и осью аномального интервала. Графическая невыразительность аномального интервала a1-b1 на фрагменте 35, связана с диапазоном измеряемых модулей радиус-векторов gφ-ац, которые по мере приближения к полюсу стремятся к нулевым величинам. При этом точность дискретных значений интервала a1-b1, соответствует точности определения значений в нижней части траектории (интервал а-b), что наглядно демонстрируют графики 19 и 21 градиента кардиоиды на фиг. 4. Наряду с этим, времена между значениями точек кардиоиды (при ω=const) равны. Аномальные приращения, связанные с влиянием планет, имеют отрицательные приращения -Δgφ. Тот же эффект получают от плотностной неоднородности с меньшей плотностью ρ относительно плотности вмещающих пород. Аномальный интервал а-b и a1-b1 характеризуют осью 36 аномального интервала с углом φ и центральным углом. На фиг. 5 - угол φ=26°, и центральный угол - 29°.
Определяют цену условной единицы измерения «к», выражающую зависимость единицы ускорения свободного падения gz от условной единицы, например, наногал/усл. ед.. Цену условной единицы k вычисляют посредством деления среднего значения ускорения свободного падения gz на среднее значение разности частоты Δf, которыми охарактеризован результирующий вектор gz в процессе измерений. Используют цену условной единицы k и пересчитывают значения модулей аномальных приращений ±Δgφ 3D-годографа gφ, модуль результирующего вектора аномалии rр и его проекции на уровенную плоскость ХОУ и ось Z в дольные единицы ускорения свободного падении, например, наногал (нГал). При пересчете используют результаты измерений, полученные при градуировке устройства в уровенной плоскости, в частности, характеристику линейности градуировочного графика измерительных каналов от угловой скорости вращения датчиков.
Определяют центр масс неоднородности в недрах Земли на фиг. 9 посредством определения координат точки 41 пересечения осевых линий 40 с результирующими векторами аномалий rр с нескольких пикетов наблюдения. Например, пункты наблюдения ПК-1 и ПК-2 на фиг. 9 расположены с разных сторон относительно центра масс неоднородности в земных недрах 42. Аналогично определяют геометрические контуры плотностной неоднородности 42. Контуры области неоднородности 42 в недрах земли отображают на карте и разрезах с геологической информацией.
На фиг. 10 и фиг. 11 приведены потенциальные характеристики поля в виде графически построенных моделей. Как было описано выше, по серии кардиоид 18 в разных плоскостях вращения с общим вектором gz получают 3D-кардиоиду gφ 37 на фиг. 10. 3D-кардиоида 37 характеризует потенциальную поверхность напряженности поля на пикете наблюдения в условиях измерений с использованием меры сравнения - центростремительного ускорения ац. Вычитают из 3D-годографа значения меры сравнения ац и получают 3D-годограф gφ на фиг. 11 с аномальной областью 39, которая характеризует потенциальную поверхность напряженности поля в виде сферы 38 на пикете наблюдения с общим радиус-вектором gz. По аномальным интервалам, лежащим в пределах аномальной области 39, определяют результирующий вектор аномальной области rр (р - результирующий), вертикальную rz и горизонтальную rx составляющие - показано на фиг. 9. Пространственное положение результирующего вектора rp, лежащего на оси аномальной области 40, характеризуют в сферических координатах (r, Θ, φ) на фиг. 8.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ИЗМЕРЕНИЯ УСКОРЕНИЯ СВОБОДНОГО ПАДЕНИЯ | 2011 |
|
RU2504803C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ РАСПРОСТРАНЕНИЯ ГРАВИТАЦИОННОГО ВЗАИМОДЕЙСТВИЯ ТЕЛ | 1998 |
|
RU2124743C1 |
| БИОСЕКРЕТ | 1994 |
|
RU2133048C1 |
| СПОСОБ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИИ | 2022 |
|
RU2806707C1 |
| КОМПЕНСАЦИОННЫЙ СПОСОБ ВВЕДЕНИЯ ЭНЕРГИИ В РАБОЧЕЕ ТЕЛО И УСТРОЙСТВО КОМПЕНСАЦИОННОЙ КАМЕРЫ СГОРАНИЯ ДИЗЕЛЬНОГО ДВИГАТЕЛЯ | 2008 |
|
RU2382215C2 |
| СПОСОБ МОНИТОРИНГА МАШИН И СООРУЖЕНИЙ | 2008 |
|
RU2371691C1 |
| Способ морской гравиметрической съемки и устройство для его осуществления | 2020 |
|
RU2767153C1 |
| Способ подготовки высокодетальных гравиметрических карт | 2021 |
|
RU2777713C1 |
| ПРИБОР ДЛЯ ИЗМЕРЕНИЯ ЭНЕРГИИ ВЗАИМОДЕЙСТВИЯ ФЕРРОМАГНЕТИКА С МАГНИТНЫМ ПОЛЕМ | 2008 |
|
RU2377590C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ОТОБРАЖЕНИЯ ФИГУРЫ ГАЗОНЕФТЯНОЙ ЛОГ-ТРУБКИ | 2008 |
|
RU2401443C2 |

Изобретение относится к области геофизики и предназначено для определения ускорения свободного падения gz и его пространственных характеристик gφ как на земной поверхности, так и на поверхностях других планет. Для определения ускорения свободного падения gz и его пространственных характеристик gφ используется измерительное устройство, оснащенное ноль-индикаторным и градиент-датчиками, установленными на диске, размещенном в координатном устройстве с возможностью вращения. Способ проведения гравиметрического зондирования заключается в получении с помощью измерительного устройства 3D-годографа gφ и сравнении полученного годографа с «нормальным годографом» с целью выявления аномальной области на полученном 3D-годографе. Данный способ обеспечивает возможность получения объемной характеристики гравитационного поля, при этом диапазон измеряемых значений ускорения свободного падения не ограничен. Техническим результатом заявленного изобретения является повышение точности и информативности гравиметрических измерений. 2 н. и 12 з.п. ф-лы, 11 ил.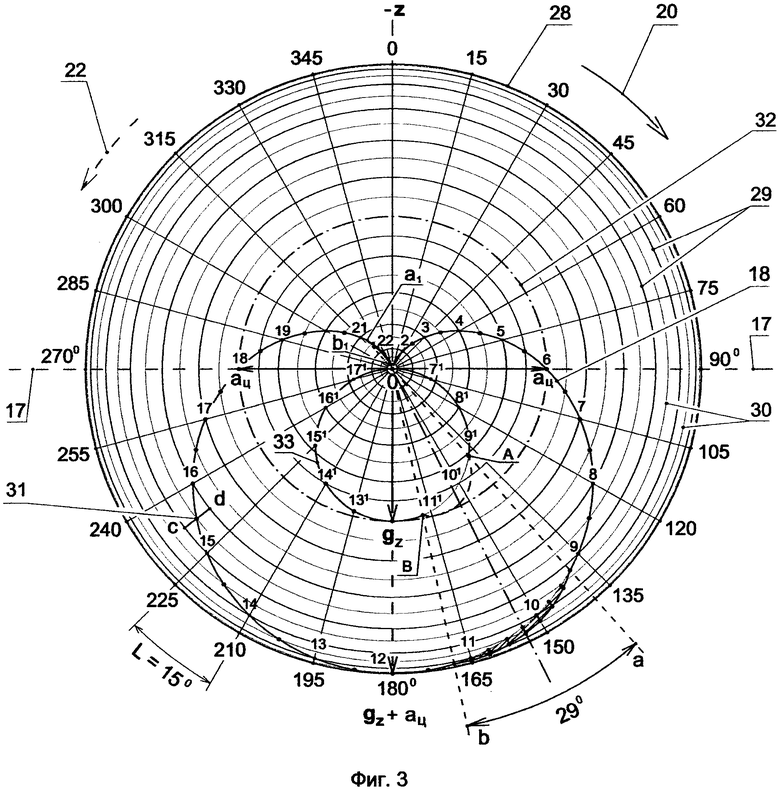
1. Способ дистанционного гравиметрического зондирования для определения пространственного положения плотностной неоднородности в недрах земли посредством дополнения значения модуля ускорения свободного падения gz постоянным значением центростремительного ускорения ац - мерой сравнения, регистрации угловой скорости ω в интервале времени, в котором модули радиус-векторов gz и ац в верхней точке траектории равномерного вращения пробной массы равны и разнонаправлены, вычисления значения ускорения свободного падения gz= ω2R и определения значений составляющих gz по направлениям в виде радиус-векторов gφ =gzcosφ ±ац посредством измерения мгновенного значения электрического сигнала потенциал-датчика в условных единицах, получения потенциальной характеристики напряженности гравитационного поля на пикете наблюдения в плоскости вращения в виде полярного графика 360° - кардиоиды, и серии кардиоид по разным азимутам ориентации плоскости вращения с общим вектором gz, после вычитания значений меры сравнения ац, характеризуют наблюденный 3D-годограф gφ - сферу, по результатам сопоставления которой со значениями «нормального годографа», рассчитанными по формуле gφ=gzcosφ, выявления аномальной области на 3D-годографе gφ, охарактеризованной аномальными отклонениями ±Δgφ , отличающийся тем, что измеряют градиент кардиоиды по траектории вращения градиент-датчика.
2. Способ по п. 1, отличающийся тем, что кардиоиду характеризуют в условных единицах разности частоты Δf1-2=f1-f2 между двумя потенциал-датчиками, формирующими градиент-датчик с выходными частотными сигналами f1 и f2, при этом за точку регистрации мгновенного значения градиента на траектории вращения принимают координаты точки, равноудаленной от центров масс градиент-датчика.
3. Способ по п. 2, отличающийся тем, что разность частоты Δf1-2 измеряют посредством частотного компаратора, при этом частоту компаратора синхронизируют стандартным сигналом спутниковых радионавигационных систем ГЛОНАСС/GPS.
4. Способ по п. 2, отличающийся тем, что график градиента характеризуют дискретными значениями разности частоты в точках кардиоиды, равномерно распределенными по траектории вращения, при этом дискретные значения точек графика градиента характеризуют средними дискретными значениями разности частоты, которые вычисляют в пределах установленного интервала усреднения.
5. Способ по п. 1, отличающийся тем, детальность графика градиента кардиоиды увеличивают, уменьшая размеры интервала усреднения и увеличивая количество дискретных значений на траектории вращения градиент-датчика.
6. Способ по п. 1, отличающийся тем, что рассчитывают две кардиоиды, отдельно по каждому направлению вращения градиент-датчика, с началом вычисления от полюса кардиоиды «0» - последовательно суммируют дискретные значения градиента по каждому направлению вращения по замкнутому контуру (0-360°) с шагом суммирования, равным шагу измерения градиента, и вычисляют средние дискретные значения точек кардиоиды.
7. Способ по п. 1, отличающийся тем, что определяют границы аномального интервала, «видимые» из точки наблюдения, расположенной в центре вращения пробных масс датчиков - секторе, в котором лежит аномальный интервал на годографе, и сектор характеризуют центральным углом и результирующим вектором аномального интервала r, лежащим на оси сектора.
8. Способ по п. 1, отличающийся тем, что детализируют выявленную аномальную область на 3D-годографе gφ, уточняют границы аномалии, направление и значение модуля результирующего вектора rp аномальной области посредством дополнительных измерений в пределах ее границ, при этом пространственное положение результирующего вектора rp аномальной области на 3D-годографе gφ характеризуют в сферических координатах (r, Θ, φ) с началом координат в центре вращения пробных масс градиент-датчика: углом Θ (между плоскостью с осью Z и вектором rp и меридианом точки наблюдения в северном направлении) и углом gφ (между результирующим вектором rp и осью Z).
9. Способ по п.1, отличающийся тем, что объединяют аномальные интервалы кардиоиды, определенные в нижней и верхней частях траектории вращения градиент-датчика, посредством проецирования аномальных приращений ±Δgφ на нормальный 3D-годограф gφ по соответствующим радиус-векторам, лежащим на одной прямой с полюсом «0», и суммируют модули упомянутых аномальных приращений.
10. Способ по п. 1, отличающийся тем, что определяют цену условной единицы измерения «k» между средним значением ускорения свободного падения gz в дольных единицах (наногал) и средним дискретным значением разности частоты Δf1-2, которыми охарактеризован результирующий вектор gz, - вычисляют частное от деления значения gz, определенное в единицах ускорения свободного падения, на значение gz в условных единицах разности частоты Δf1-2.
11. Способ по п. 1, отличающийся тем, что пересчитывают значения модулей аномальных приращений ±Δgφ 3D-годографа gφ, измеренные в условных единицах, в дольные единицы ускорения свободного падения (наногал) посредством умножения модулей аномальных приращений ±Δgφ, модуля результирующего вектора rp аномальной области и его проекции на уровенную плоскость ХOY - rx и ось Z - rz на коэффициент k.
12. Способ по п. 1, отличающийся тем, что определяют положение центра масс неоднородности в недрах посредством определения координат точки пересечения осей аномальных областей 3D-годографа с результирующими векторами rp, определенными на нескольких пунктах наблюдения, расположенных с разных сторон и на разных расстояниях относительно центра масс неоднородности.
13. Способ по п. 1, отличающийся тем, что определяют геометрические параметры плотностной неоднородности посредством проецирования границ аномальных областей 3D-годографа gφ , ограниченных секторами с вершинами, расположенными в центре вращения пробных масс градиент-датчика, определенных на нескольких пунктах наблюдения, по направлению центра масс, и получают пространственный контур области неоднородности в недрах земли, который отображают на карте и разрезах с геологической информацией.
14. Устройство для осуществления способа дистанционного гравиметрического зондирования, содержащее потенциальный и ноль-индикаторный датчики, установленные на диске в координатном устройстве с возможностью вращения диска, при этом координатное устройство обеспечивает вращение диска в плоскостях, ориентированных по разным азимутам, с общей координатной осью Z, с постоянной угловой скоростью ω, постоянным радиусом вращения датчиков в прямом и обратном направлении, оснащенное прецизионным секундомером, компаратором, усилителем, компьютером, системой управления производством измерений, системой терморегуляции, отличающееся тем, что устройство оснащают дополнительным потенциал-датчиком, формирующим совместно с существующим потенциал-датчиком градиент-датчик, который характеризуют постоянным расстоянием L между центрами масс потенциал-датчиков, и измерительная установка имеет не менее двух градиент -датчиков с разными значениями L.
| US 6658935 B1 09.12.2003 | |||
| WO 2013077771 A1 30.05.2013 | |||
| WO 1989011666 A1 30.11.1989 | |||
| Устройство для съема волокна с хлопковых семян и шелухи | 1950 |
|
SU89723A1 |
| СПОСОБ И УСТРОЙСТВО ИЗМЕРЕНИЯ УСКОРЕНИЯ СВОБОДНОГО ПАДЕНИЯ | 2011 |
|
RU2504803C2 |
| СПОСОБ ТЕПЛОЙ РЕГЕНЕРАЦИИ АСФАЛЬТОБЕТОНА (ВАРИАНТЫ) | 2011 |
|
RU2482085C2 |

