Известен способ .однопрофильного ком1плексного контроля зубчатых колес с помощью эталонного червяка, по которому производят измерение и запись разности фазовых характеристик, прОПорциональных кинематической ногрешности контролируемого 1колеса, причем контролируемое колесо вращается от .привода через эталонный червяк, который является ведущим .
Описываемый способ отличается от известного тем, ЧТО контролируемое колесо приводят во вращение дв,игателем станка, а эталонный червяк вращают от независимого регулируемого привода с мягкой характеристикой, обеспечивая В зацеплении кинематический контакт и необходимое измерительное усил.ие. Это позволяет осуществлять контроль колес непосредственно на столе зубообрабатывающего станка..
Описываемый способ поясняется чертел о-м.
Способ контроля зубчатых колес в однопрофильном зацеплении заключается В следующем .
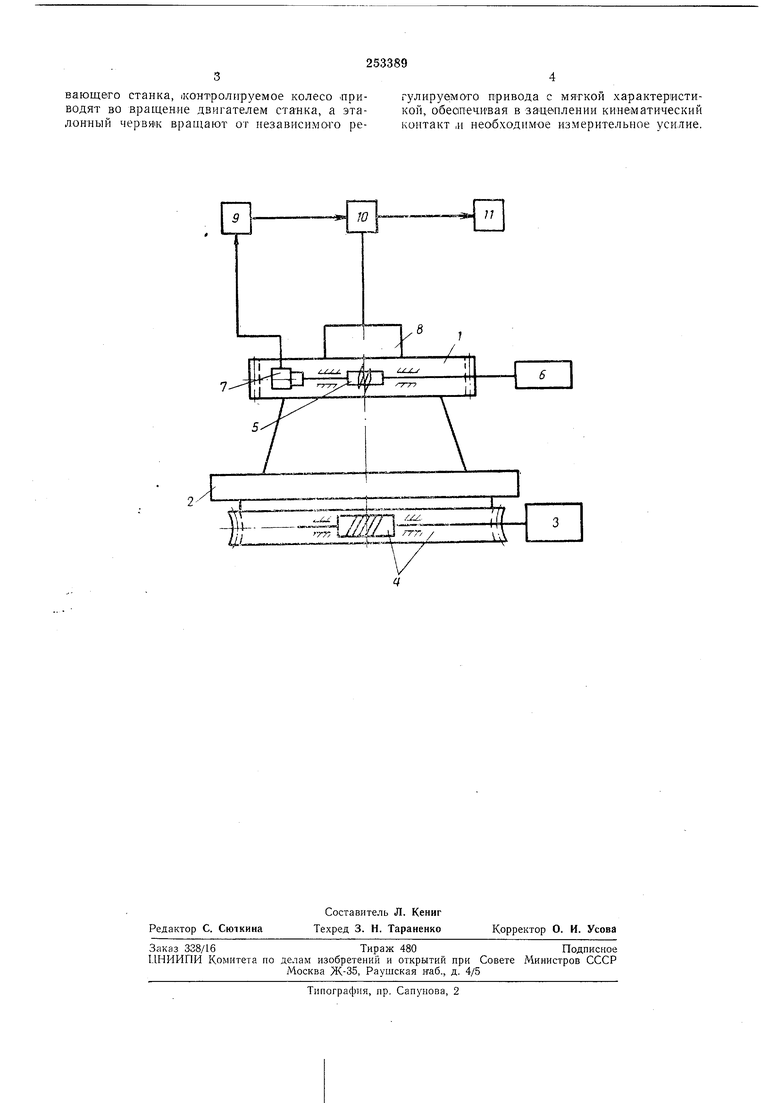
Контрол.ируемое зубчатое колесо J, установленное на столе 2 зубообрабатывающего ставка, приводится во вращение приводом станка через делительную пару 4. Эталонный червяк 5 вращается регулируемым и и,меющ.им мягкую характеристику приводом 6 с угловой скоростью, обеспечивающей непрерывный контакт между профиля1ми зубьев контролируемого колеса 1 и эталонного червяка 5. На валах эталонного червяка 5 и контрол.ируемого колеса / установлены (преобразователи 7 и 8 угла поворота, 1Преобразующие утлы .поворота колеса / и червяка 5 в последовательность электрических импульсов.
Импульсы с Преобразователя 7 через электронный делитель 9 поступают на первый канал фазометра 10, на второй «акал которого .поступают импульсы с преобразователя 8. Делитель 9 согласовывает частоты первого и второго каналов при измерении колес с различным числом зубьев. Фазометр 10 измеряет сдвиг фаз между сигналами преобразователей 7 и 8 угла поворота, пропорциональный кинематической и циклической погрещности зубчатого 1колеса L
Результат измерения регистрируется самопищущим пр.ибором 11.
Предмет изобретения
Способ контроля зубчатых колес в однопрофильном зацеплении, состоящий в том, что угловые перемещения эталонного червяка и кОНтролируемого колеса .превращают в последовательность электрических импульсов, которые затем сравнивают между собой, отличающийся тем, что, с целью осуществления контроля непосредственно на столе зубообрабатыБающего станка, (контролируемое колесо лриводят во в,ра1цение двигателем стайка, а эталонный червя1К вращают от независимого регулируемого привода с мягкой характеристикой, Обеопечивая в зацеплении кинематический контакт |И необходимое измерительное усилие.