Изобретение относится к измерительной технике в машиностроении, а именно к средствам комплексного контроля зубчатых колес в одноп юфильном зацеплении.
Известны устройства для определения прерывной кинематической погрешности зубчатых.колес на приборе для комплексного однопрофильного контроля, используюпще механические средства измерения.
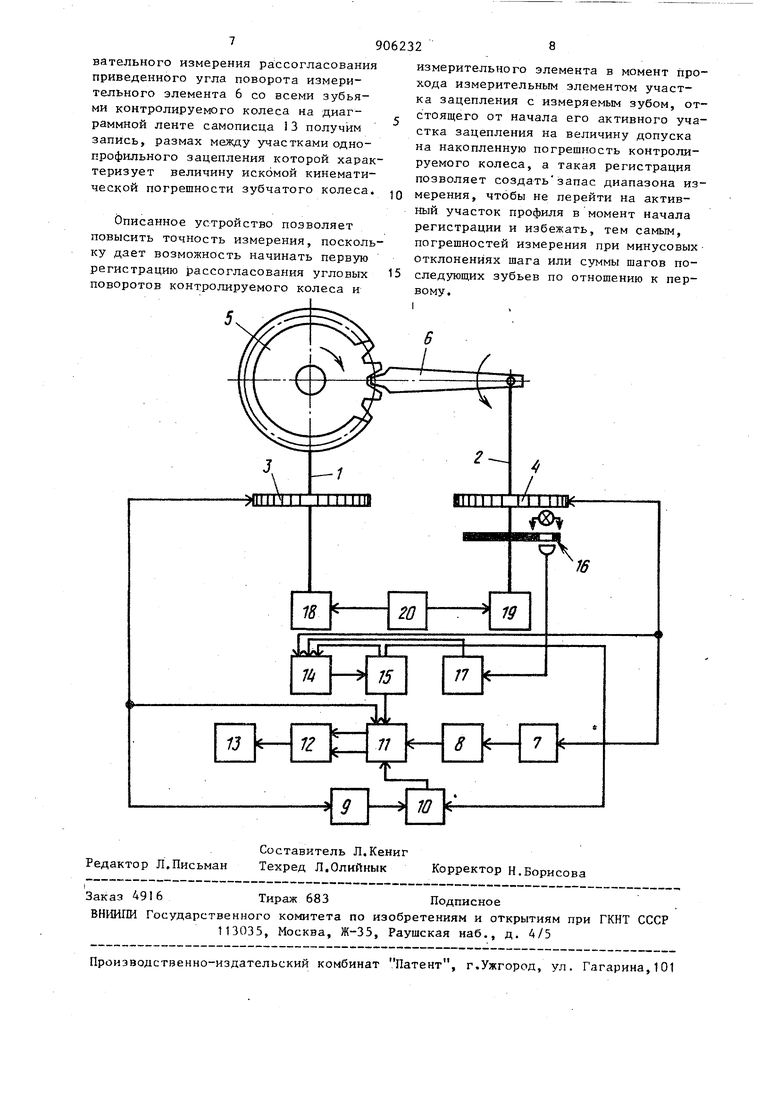
Известно также устройство для определения прерывной кинематической погрешности зубчатых колес на прибо3906ре для однопрофильного контроля,содержащее преобразователи угловых поворотов контролируемого колеса и измерительного элемента, последователь но соединенные первый умножитель,свя занный с преобразователем угла поворота измерительного элемента и настроенный на приведенное число его зубьев, и первый делитель, настроенньш на число зубьев контролируемого колеса, фазометр, самописец, подключенный к его выходу, и блок согласования вращения контролируемого колеса и измерительного элемента о Данное устройство является наиболее близким из известных к описываемому изобретению по технической сущности, и достигаемому результату. Недостатком известного устройства является возможность внесения по. грешностей. при измерении величины накопленной погрешности шага в случае минусовых отклонений шага или суммы шагов последующих зубьев по отношению к первому, поскольку в известном устройстве можно начинать первую регистрацию рассогласования угловых поворотов контролируемого ко леса и измерительного элемента в любой момент времени. Целью изобретения является повышение точности измерения о Эта цель достигается тем, что устройство снабжено последовательно соединенными вторым умножителем,связанным с преобразователем угла поворота контролируемого колеса и настро енным на число его зубьев, и вторым делителем, настроенным на произведение числа периодов выходного сигнал преобразователя угла поворота контролируемого колеса за один оборот и числа его зубьев, увеличенного или уменьшенного на единицу,блоком коммутации, импульсным командным блоком, блоком сброса на нуль и отметч ком оборотов измерительного элемент с подключенным к нему нормирующим преобразователем, к блоку коммутации подключены оба делителя, преобразователь угла поворота контролируемого колеса и блок сброса на нуль, выходы блока коммутации подключены к фазометру, к входам импульсного командного блока подключены преобразователь угла поворота измерительно го элемента, нормирующий преобразователь и блок сброса, который подключен также к второму делителю, а выход импульсного командного блока подключен к блоку сброса„ На чертеже изображена блок-схема описыв аемо го ус трои с тв а. На шпинделях 1 и 2 прибора для комплексного однопрофильного контроля зубчатых колес установлены преобразователи 3 и 4 угловых поворотов соответственно контролируемого колеса 5 с числом Z зубьев и измерительного элемента 6 с приведенным числом Z зубьев. Умножитель 7, связанный с преобразователем 4 и настроенный на приведенное число Z зубьев измерительного элемента 6, последовательно соединен с делителем 8, настроенным на число Z зубьев колеса 5. Умножитель 9, связанный с преобразователем 3 и настроенный на число Z зубьев колеса 5, последовательно соединен с делителем 10, настроенным на величину N( 1),представ лякщую собой произведение числа N периодов выходного сигнала преобразователя 3 за один оборот колеса 5 и числа зубьев колеса 5, увеличенного или уменьшенного на единицу. Знак плюс соответствует случаю, когда осуществляют зацепление измерительного элемента с последующими зубьями контролируемого колеса по отношению к первому, а минус - с предыдущимиоДелители 8 и 10 и преобразователь 3 подключены к блоку 11 коммутации,выходы которого подключены к фазометРУ 1 2,подключенному ,в свою очередь к самописцу 13, Преобразователь 4 подключен к одному из входов импульсного командного блока 14, выполненного, например, на основе делителя, с другими входами которого связаны блок 15 сброса на нуль и отметчик 16 оборотов измерительного элемента с подключенным к нему нормирующим преобразователем 17, которьй настроен на выдачу импульса при определенном известном угловом положении измерительного элемента в период его зацепления с контролируемым колесом, например, при проходе рабочим профилем измерительного элемента полюса зацепления. Выходы блока 15 подключены к блоку 14, к делителю 10 и к блоку 1 коммутации. Шпиндели i и 2 получают согласованное вращательное прерывистое движение от приводов 18 и 19 (например шаговых двигателей) соответственно. Согласование этого движения обеспечи вается блоком 20 согласования вращения контролируемого колеса и измерительного элементно Устройство работает следующим образомоВ процессе согласованного прерывистого движения измерительного элемента 6 и контролируемого колеса 5 измерительный элемент 6 последовательно зацепляется с зубьями колеса 5. Электрический сигнал измерительной информации о величине переме щения измерительного элемента 6 с вы хода преобразователя 2 поступает на вход умножителя 7, где преобразуется в электрический сигнал с частотой в Z раз большей, чем на его входе С выхода умножителя 7 сигнал поступает на вход делителя 8, где преобра зуется в электрический сигнал с частотой в Z раз меньшей, чем на его :входе. С выхода делителя 8 сигнал поступает в блок I1 коммутации, причем в, результате преобразований частоты умножителем 7 и делителем 8- частота электрического сигнала на выхо де делителя 8 оказывается номинально равной частоте электрического сигна.ла на выходе преобразователя 3 в условиях зацепления измерительного эле мента 6 с контролируемым колесом 5. Электрический сигнал измерительной информации о величине леремещения контролируемого колеса 5 с выхода преобразователя 3 поступает на вход блока 11 коммутации, а также на вход умножителя 9, где преобразуется в электрический сигнал с частотой в Z раз большей, чем на его входе С выхода умножителя 9 сигнал поступает на вход делителя 10, который включается в работу только при приходе команды от блока 15 сброса на нуль. Блок 15 сброса осуществляет .включение импульсного командного блока 14, который подключен к одному из его выходов, после ручного ввода команды (например, с помощью кнопочного переключателя) на начало цикла измерения. К входам импульсного командного блока 14 подключены преобразователь 2 и нормирующий презователь 17, который преобразует ква зисинусоидальный сигнал от отметчика 16 оборотов измерительного элемента в импульсную форму, причем выдача импульса нормирующим преобразователем 17 соответбтвует определенному известному угловому положению измерительного элемента. Импульс на входе нормирующего преобразователя 17 осуществляет запуск импульсного командного блока 14, который при повороте измерительного элемента на некоторый угол, определяемый по расчетным зависимостям, с момента прихода и myльca от нормирующего преобразователя- 17 и достижении измерительным элементом углового положения, в котором он отстоит от начала активного участка линии зацепления на величину допуска на накопленную погрешность шага контролируемого колеса 5, выда- . ет команду на начало первого измерения. Эта команда поступает на вход блока 15 сброса на нуль, который осуществляет запуск делителя 10 и на его выходе появляется первый импульс, при проходе которого блок 11 коммутации подключает выходы преобразователя 3 и делителя 8 ко входам фазометра 12 о Фазометр 12измеряет сдвиг фаз между электрическими сигналами от делителя 8 и преобразователя З.К выходу фазометра подключен самописец 13, регистрирующий результаты измерения. Блок 15 сброса на нуль при приходе команды на начало первого измерения от импульсного командного блока 14. осуществляет его отключение и в дальнейшем блок 14 в работе не участвует. Последующими командами на подключение выходов делителя 8 и преобразователя 3 блоком 11 коммутации к фазометру 12 служат импульсы, приходящие на вход блока 11 коммутации от делителя 10, который преобразует электрический сигнал на входе умножителя 9 и сигнал с частотой в N(Z tl) раз меньшей, чем частота на его входе, Таким образом. На выходе делителя 10 появляется импульс при повороте контролируемого колеса 5 на 1 оборот ± угловой шаг (плюс соответствует настройке блока 20 со- гласования вращения на зацепление измерительного элемента с последуюЩими зубьями контролируемого колеса 5, а минус - с предыдущими), что обеспечивает проявление отклонений шагов контролируемого колеса 5 в результатах измерения После последе
УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПРЕРЫВНОЙ КИНЕМАТИЧЕСКОЙ ПОГРЕШНОСТИ ЗУБЧАТЫХ КОЛЕС на приборе для комплексного однопрофильного контроля, содержащее преобразователи угловых поворотов контролируемого колеса и измерительного элемента, последовательно соединенные первый умножитель, связанный с преобразователем угла поворота измерительного элемента и настроенный на приведенное число его зубьев, и первый делитель, настроенный на число зубьев контролируемого колеса, фазометр, самописец, подключенный к выходу фазометра, и блок согласования вращения контролируемого колеса и измерительного элемента. отличающееся тем, что, с целью повьшения точности измерения , оно снабжено последовательно соединенными вторым умножителем,связанным с преобразователем угла поворота контролируемого колеса и настроенным на число его зубьев, и вторым делителем, настроенным на произведение числа периодов выходного сигнала преобразователя угла поворота контролируемого колеса за один оборот и числа его зубьев, увеличенного или уменьшенного на единицу, блоком коммутации, импульсным командным блоком, блоком сброса на нуль и отметi чиком оборотов измерительного элемента с подключенным Кхнему нормирую(Л щим преобразователем, к блоку коммутации подключены оба делителя, преобразователь угла поворота контролируемого колеса и блок сброса на нуль, выходы блока коммутации подключены к фазометру, ко входам им:о о э: пульсного командного блока подключены преобразователь угла поворота измерительного элемента, нормирующий SD преобразователь и блок сброса, котои рый подключен также ко второму лителю, а выход импульсного командного блока подключен к блоку сброса.
| Тайц Б.А | |||
| Точность и контроль зубчатых колес | |||
| - М | |||
| Машгиз, 1972, с.236-238„ Авторское свидетельство СССР № 599154, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
