Изобретение относится к области линейноугловых измерений, а именно к устройствам для комплексного однопрофильного контроля зубчатых колес.
Известны устройства для комплексного однопрофильного контроля с дискретной формой измерения кинематической и циклической погрешностей, основными элементами которых являются преобразователи угла поворота в периодическое следование импульсов электромагнитных .или фотоэлектрических сигналов, делитель образцового передаточного отношения, фазометрический блок определения дискретного значения погрешности и блок регистрации погрешности, а также схема сравнения дискретных значений погрешности, регистры запоминания текуш,его значения погрешности, сумматор ошибки.
Представление погрешности в аналоговой форме в виде диаграммы кинематической погрешности ограничивает точность измерения, а также существенно снижает производительность контроля из-за необходимости дополнительной обработки информации с целью получения числового значения измеряемой погрешности.
Для этого вход фазометрического блока подключен к преобразователю измерительного червяка, а также к преобразователю контролируемого колеса и к делителю образцового передаточного отношения, выход фазометрического блока соединен со входами регистров через схему сравнения, а выходы регистров подключены ко входу сумматора ошибки, выход которого соединен с блоком регистрации погрешности - цифровым табло. Кроме того, раздельные входы разрядов сумматора ошибки соединены с его выходом через переключатели допуска контролируемой погрешности.
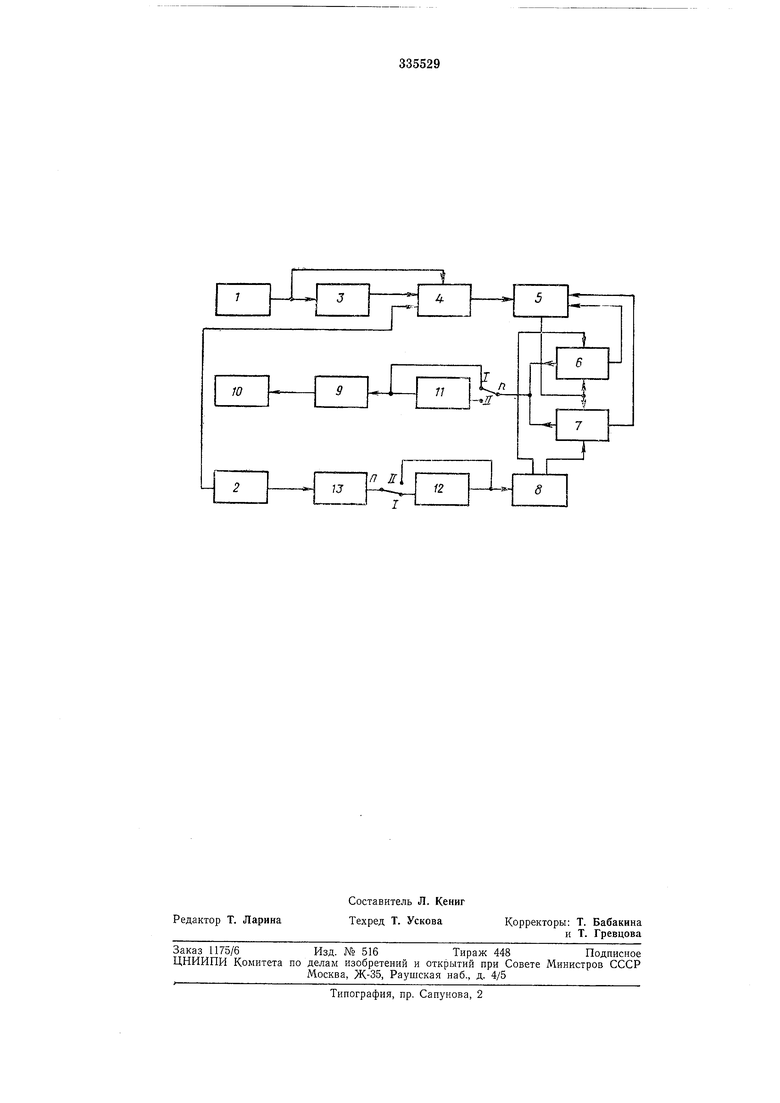
Коммутация основных элементов предлагаемого устройства показана на блок-схеме.
Измерительный однозаходный червяк и контролируемое колесо, соосно соединенные с однотипными преобразователями 1 и 2 угла поворота в код, находятся в зацеплении на заданном межцентровом расстоянии и при измерении приводятся в движение от механизма привода (кинематическая схема на чертеже не представлена).
В делителе 3 устанавливается образцовое значение передаточного отношения в виде числа, равного числу зубьев. Фазометрический блок 4 фиксирует очередность прихода импульсов с преобразователя 2 контролируемого колеса и делителя 3, а также полученный фазовый сдвиг - дискретное значение погрешности А2 счетными импульсами с преобразователя 1.
Схема сравнения 5 сопоставляет дискретное значение кинематической погрешности, зарегистрированное фазометрическим блоком 4, со значением регистра 6 либо 7 (коммутация определяется очередностью прихода импульсов с преобразователя 2 и делителя 3).
Схема переноса 8 позволяет записать значения, зарегистрированные в регистрах и 7, в сумматор ошибки 9, где подсчитывается числовое значение контролируемой погрешности, которое индицируется цифровым табло 10. Делитель 11 служит для пересчета значения циклической погрешности.
Период циклической погрешности определяется коэффициентом пересчета Zg делителя 12, который соединен с делителем 13, коэффиNциент пересчета последнего -, а их суммар д
ное значение N определяет полный периодоборот преобразователя 2 контролируемого колеса (ZQ - передаточное отношение делительной пары зубообрабатываюш,его станка на финишной операции).
Цифровая схема устройства обеспечивает выполнение измерительных операций по следующей программе.
Перед контролем осуществляется установка значения z в делителе 3, значения ZQ в делителях 12 тл. 11, а также - в делителе 13.
д
При контроле кинематической погрешности
переключатель П установлен в положение I, к этому моменту включены механизм привода и схема измерения.
Импульс с преобразователя 2 запускает схему измерения. Счетные импульсы с преобразователя 1 поступают в делитель 5 образцового передаточного отношения.
Переполнение делителя 5 (г-ый импульс) является опорным импульсом для фазоизмерительного блока 4, з котором фазовый сдвиг между опорным импульсом и очередным импульсов с преобразователя 2 оценивается счетными импульсами. Очередность прихода стартлибо стоп-импульса при промежуточном преобразовании дискретного значения контролируемой погрешности во временной интервал определяется знаком погрешности. Стоп-импульс служит командой операции сравнения содержания блока 4 со значением регистра 6 или 7 с помощью схемы сравнения 5, при этом выбор регистра определяется очередностью прихода импульсов с преобразователя 2 и делителя 3, быстродействие схемы позволяет провести все эти операции до прихода следующего счетного импульса.
Операция сравнения позволяет либо записать в регистр большее значение из фазометрического блока, предварительно сбросив регистр, либо сохранить в регистре предыдущее значение. После проведения операции сравнения фазометрический блок сбрасывается.
регистре 6 окажется значение max(-fAZ), а в регистре 7 шах(-AZ), и в конце периода измерения импульс с преобразователя 2, пройдя делители 13 и 12, подает команду в схему переноса 8.
Схема переноса одновременно с командой окончания измерения осуществляет последовательно перезапись значений из регистров 6 и 7 в сумматор 9 (делитель // зашунтирован).
Кинематическая погрешность, числовое значение которой определяется в сумматоре, индицируется цифровым табло 10. Контроль циклической погрешности осуществляется по той же программе.
Переключатель П устанавливается в положение II, и период измерения погрешности определяется - импульсами с преобразователя 2.
Схема переноса осуществляет запись значений тах(+А2к) и шах(-AZK), определяемых в пределах к-го периода циклической погрешности, в сумматор 9 через делитель 11. После
очередной операции переноса регистры 5 и 7 сброшены.
В соответствии с предложенной методикой в сумматоре 9 в течение % цикла-оборота контролируемого колеса будет определена
циклическая погрешность, числовое значение которой индицируется на табло 10.
Предмет изобретения
1. Устройство для измерения кинематической и циклической погрешностей зубчатых колес при комплексном контроле в однопрофильном зацеплении с измерительным червяком, содержащее однотипные преобразователи угла поворота в число-импульсный код, соосно соединенные с измерительным червяком и контролируемым колесом, делитель образцового передаточного отношения, фазометрический блок определения дискретного значения погрешности, схему сравнения дискретных
значений погрешности, регистры запоминания текушего дискретного значения погрешности, сумматор ошибки и блок регистрации погрешности, отличающееся тем, что, с целью повышения точности и производительности контроля, вход фазометрического блока подключен к преобразователю измерительного червяка, а также к преобразователю контролируемого колеса и к делителю образцового передаточного отношения, выход фазометрического
блока соединен со входами регистров через схему сравнения, а выходы регистров подключены ко входу сумматора ошибки, выход которого соединен с блоком регистрации погрешности - цифровым табло.
2. Устройство по п. 1, отличающееся тем, что, с целью регистрации перехода контролируемой погрешности за пределы поля допуска, раздельные входы разрядов сумматора ошибки соединены с его выходом через переключа