Изобретение относится к области иостроенпя перспективных изображений точки, ненрерывно движущейся ио заданной кривой линии при эквидистантном неремеитгнии г ентра и нлоскоети проецирования, и может найти иримекение при проектировании автомобильных дорог ио чертежу.
Известный способ имитации процесса движения ио недостроенной дороге с помопи ю мультипликацпп требует вычерчивапия десятков тысяч перспективных изображенпй участков дороги.
Предложенное устройство позволяет получать кпнематнческую перспективу по плану профилю пространственной лпнпп, нанесенным на прозрачную оспову (кальку), в виде совокуппости движущихся светящихся точек, которые могут быть зафиксированы на светочувствительном aтepпaлe.
Известен перспектограф, содержащий электролюминесцентнуро матрицу, контактную панель с ползунами, электричееки соединенными с матрицей, телескопические стержни, inapнирно соединенные с ползунами контактной ианели, каретки с фотоэлектронным следящим устройетвом, расположенные на поперечных направляющих.
будет нсирсрывно отмечать па переднем стекле (картипа) иерсиективу точки, которая скользит ио оси дороги на расстоянни .V метров от автомобиля, то зта меняющая положение центральная и юекция точки па стекле п будет представлять собой кинематическую иерспехтиву точки, движуще1 ;ся по прострг;нственн(м1 кривой линии (оси дороги) сиихронио с автомобилем. Если отметить проекции не , а гру-пиы точек, ирпнад.чежац:пх осп дорэги, то на картине появится непрерывно меняюпдаяся кинематическая иерспектпва оси дороги, т. е. на картине будет создан эффект непрерывного дв1 жения вдоль осп автомобиль;;о)1 дороги. Можно выиолнить так же кинематическую исрсие;чтиву кромок дорожного иолотпа, тогда кинематичеекая иерспектива трех линий (оси и двух кромок) еоздает эффект движения ио полотну автомобильпой дороги.
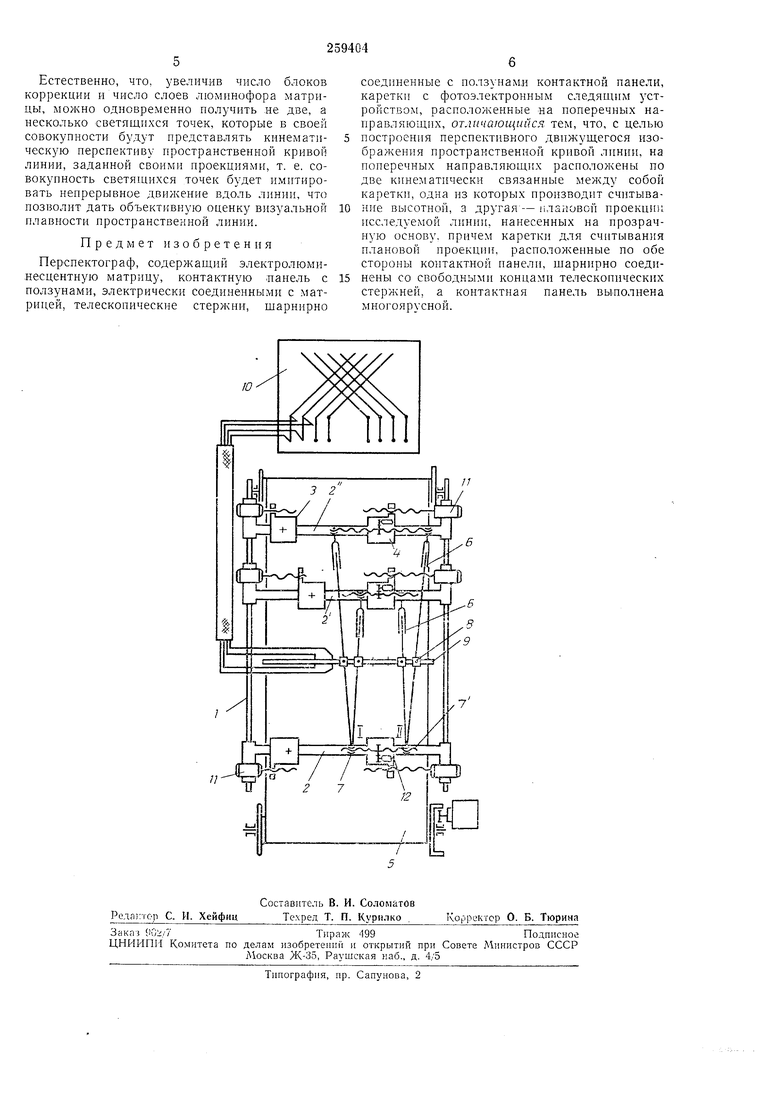
На чертеже иредстав,1ена принципиальная схема перспектографа, содержащего продольные направляющие /, по которым перемепааются поперечные направляющпе 2, 2, 2 с каретками с фотоэлектронными следящими устройствами. Каретка 3 служит для считывания высотной, а каретка 4-для ечитывания плановой проекции псследуемой линии, нанесенных :а ирозрачную основу, выполненную подвнжной, в виде ленты о, наматываемой на барабаны.
Телескопические стержни 6 с помощью гаекшарниров 7, 7- соединены на концах с каретками 4 и шарнирно-с нолзунами (скользящими контактами) 5 контактной панели 9. Контактная панель электрически соединена с матрицей JO.
Каретки работают следующим образом. Свет от источника через прозрачную основу попадает на фотоэлементы каретки, связанные с электродвигателем 11. Линия чертежа, выполняющ.ая роль заслонки, изменяет сопротивление фотоэлемента, приводящего в действие электродвигатели, перемещающие каретку, с помощью винтовой нары до тех иор, пока линия не расположится между фотоэлементами каретки. На каретке 4 установлен электродвигатель 12, который электрически связан с кареткой 5, приводящий во вращение винт с двойной (правой и левой) нарезкой, изменяя расстояние между гайками-щарнирами 7 и 7. Звенья кинематических цепей между каретками подбираются так, чтобы расстояние между гайками-щарнирами 7, 7 всегда было равно удвоенному расстоянию профильной проекцип липии от линии нулевого отсчета. Плановая проекция точки всегда находится в середине отрезка 7-7, а высота ее численно равна (в соответствующем масщтабе) половине отрезка 7-7.
Электросублиматлюминофорная матрица представляет собой многослойный элемент, применение которого обусловлено способностью электролюминофоров излучать свет, если они находятся между двумя электропроводящими покрытиями, на которые подано папряженне переменного тока. В качестве токоироЕодящего покрытия может быть использован слой окиси олова (прозрачный слой, обладающий оптическим пропусканием порядка 80% и более), занесенный путем пульверизации спиртового раствора хлорного олова на нагретую до 500°С поверхность. Токопроводящее нокрытие наносится в виде прямых линий. Ширина электродов составляет 0,2 - 0.5 мм, а расстояние между ними порядка 0.37- 0,8 мм.
Для создания комплексной матрицы иеобходимо иметь прозрачный люминофор - сублиматлюминофор. Такие сублиматлюминофоры известны. Основным компонентом их является сульфид цинка. Наносятся сублиматлюминофоры путем вакуумного осаждения. Матрица 10 состоит из стеклянных плиток, на которые нанесены растровые нрозрачпые электроды. На электроды наноснтся слой электросублиматлюминофора. На слой люминофора затем наносится растр прозрачных электродов, расположенных под углом к электродам первого растра. Ээлектроды заканчиваются контактными глазками, необходимыми для коммутации матрицы к соэтветствующсн схеме. Если нодать электрический потенциал на пару электродов, между которыми находгтся
слой люм1П- офора, то в месте их пересечения возникнет светящаяся точка. Матрица позволяет получить одновременно две светящиеся точки, находящиеся в двух слоях электросублиматлюминофора.
Контактная панель .изготовляется из отдельных лепестков, набранных в два яруса и соединенных посредством коммутирующих проводов с соотвстствуюил,ими контактными глазкамп ко.МПлексной матрицы.
Для автоматического по.чучения кинематической иерспективь двух точек необходимо выполнить следуюише операции. Нлан и профиль пространственной кривой линии, вынолненные на прозрачной подложке в впде ленты, -помещают на подающую катугпку. Заправляют свободный конец лепты на нрннимающей катущке. Располагают конгаь:тную панель .9 так, чтобы она совпала с иоложеиием основанпя картннной плоскости з плане.
Устанавливают поиеречную направляющую 2 на заданное расстоянпе от картиниой плоскости, причем каретки высотной и плановой коррекции располагают над нрофилем и планом пространственной лппии таким образом, чтобы линии чертежа находились между фотоэле ментами. Если центр проецирования несколько смещен относительно пространственной линни (оси дороги), то это с.мещение
можно учесть, передвипув с помощью винтовой пары плату каретки. Если центр проецироваипя движется по кривой, отличной от той, иерспективу которой необходимо выполнять, то на поле чертеи-са 5 должна быть вычерчена
траектория движения центра проецирования, а каретки настраиваются по вычерченной траектории. Поиеречные нанравляющие 2и 2 устанавливаются в соответствии с удалениями от картинной плоскости точек, кинематические
перспективы которых необходимо построить. Каретки настраиваются относительно линий чертежа аналогично онисанному в нредыдущей операции.
На скользящие контакты 8 иодаетея напряженпе переменного тока, н па матрице 10 появляются две 1светяп.1иеся точки, иредставляющие собой иерспективы заданных точек пространственной линии из неподвижного центра проенирования на ненодвпжную картину. На
этом подготовка автомата к работе заканчивается.
Затем включается пптание электродвигателя
лентопротяжного механизма. Лента 5 чертежа
перемеп1ается относительно кареток, которые,
авто.матически следуя за соответствующими линиями чертежа, с помощью телескоппческих стержней 6 изменяют положение скользящих контактов 8. Изменение положения скользящих контактов на двухъярусной контактной
панели 9 ириводит к смещению светящихся точек Lia ко;,П1,: ексной электросублиматлюминофориой магрице 10. Эгч дзьжущиеся на матрице светящиеся точки н иредставляют собой кинематическую иерспективу двух точек
Естественно, что, увеличив число блоков коррекции и число слоев люминофора матрицы, можно одновременно иолучить не две, а несколько светящихся точек, которые в своей совокупности будут представлять кинематическую перспективу пространственной кривой линии, заданной своими проекциями, т. е. совокупность светящихся точек будет имитировать непрерывное движение вдоль линии, что позволит дать объективную оценку визуальной плавности иростраиственной линии.
Предмет изобретения
Перспектограф, содержащий электролюминесцентную матрицу, контактную панель с ползунами, электрически соединенными с матрицей, телескопические стержни, щарнирно
;;
соедииенные с ползунамн контактной ианели, каретки с фотоэлектронным следящим устройством, расположенные на поперечных направляющих, отличающийся тем, что, с целью построения перспективного движущегося изображения пространственной кривой линии, на поперечных направляющих расположены по две кинематически связанные между собой каретки, одна из которых производит считывание высотной, а другая- плановой ироекции исследуемой линии, нанесенных на ирозрачную основу, причем каретки для считывания плановой проекции, расположенные по обе стороны контактной панели, щарнирно соединены со свободными концами телескоиических стержней, а контактная панель вьщолнена многоярусной.
/7

| название | год | авторы | номер документа |
|---|---|---|---|
| Перспектограф | 1971 |
|
SU559842A1 |
| 5И5.П!->&ОТЕКЛ | 1973 |
|
SU382523A1 |
| ПЕРСПЕКТОГРАФ | 1966 |
|
SU214086A1 |
| Способ определения планового положения точек объекта и устройство для его осуществления | 1981 |
|
SU979852A1 |
| Прибор для построения наглядных изображений объекта | 1974 |
|
SU532538A1 |
| ПЕРСПЕКТОГРАФ | 1970 |
|
SU271811A1 |
| ПЕРСПЕКТОГРАФ | 1972 |
|
SU355054A1 |
| Прибор для построения перспективных изображений по ортогональным проекциям | 1945 |
|
SU68591A1 |
| Перспектограф | 1980 |
|
SU901074A1 |
| ПЕРСПЕКТОГРАФ | 1972 |
|
SU334100A1 |
