I
Изобретение относится к области построения перспективных изображений объектов, в частности к перспектографам для построения перспективных изображений точек, непрерывно движущихся по заданной пространственной кривой линии.
Известен перспектограф, содержащий устройство индикации на светящемся экране, лентопротяжный механизм с нанесенными на его ленте плановой и высотной проекциями заданной пространственной кривой, продольные направляющие с установленными на них с возможностью перестановки поперечными направляющими, одна из которых несет две центральные каретки со следящими приводами, имитирующие плановую и высотную проекции центра проецирования, а па других поперечных направляющих установлены по две каретки со следящими устройствами для считывания соответственно плановой и высотной проекций текущих точек заданной кривой, одна из которых связана телескопическим стержнем с соответствующей центральной кареткой.
В известном перспектографе принцип построения перспективного изображения обусловливает установку на каждой плановой каретке, помимо следящего устройства, привода следящей системы, связанного с высотной кареткой. Это усложняет конструкцию каретки
и всего перспектографа и затрудняет построение достаточного количества точек кривой.
Кроме того, известный перспектограф не обеспечивает независимого от проекций кривой перемещения центра проецирования. Конструкция следящих устройств кареток, выполненных в виде фотоэлектрической следящей системы, сложна. Указаяный перспектограф позволяет получить на экране перспективные изобрал ения нескольких точек, принадлежащих одной кривой, имитирующей осевую линию дороги. Такой информации о дороге недостаточно для уверенной «езды по ней. По.мимо этого, известный перспектограф не обеспечивает реакции экрана на повороты имитатора транспортного средства, имитируя лишь плоскопараллельное перемещение вдоль дороги.
Целью данного изобретения является расщирение диапазона решаемых задач и упрощение конструкции.
Для этой цели вторая каретка каждой поперечной направляющей также связана телескопическим стержнем со второй центральной кареткой, а каждый телескопический стержень имеет датчик угла поворота, например потенциометр, предназначенный для измерения на плановой проекции угла азимута каждой текущей точки кривой относительно центра проецирования, а на высотной -угла места ее, при этом все датчики электрически соединены с устройством индикации, а последнее выполнено в виде индикатора «азимут - угол места телевизионного типа с соответствующими согласующими устройствами и схемами совпадения.
Лента лентопротяжного механизма имеет края, профиль которых выполнен по форме, соответствующей высотной и плановой проекциям заданной кривой, а следящее устройство .каждой каретки выполнено в виде укрепленного на каретке наконечника, опирающегося «а край ленты. Следящий привод соответствующей центральной каретки выполнен в виде штока с наконечником, опирающегося на край ленты, при этом шток становлен на каретке с возможностью фиксации заданного расстояния до края ленты.
Каретки имеют средства, обеспечивающие постоянный контакт наконечников с краем ленты, например противовесы.
В схему устройства индикации включен блок регулирования длины «высвечиваемых на экране меток в зависимости от заданной длины образующей и удаления данной точки от центра проецирования, и блок регулирования яркости «высвечиваемых на экране меток в зависимости от удаления данной текущей точки кривой от центра проецирования.
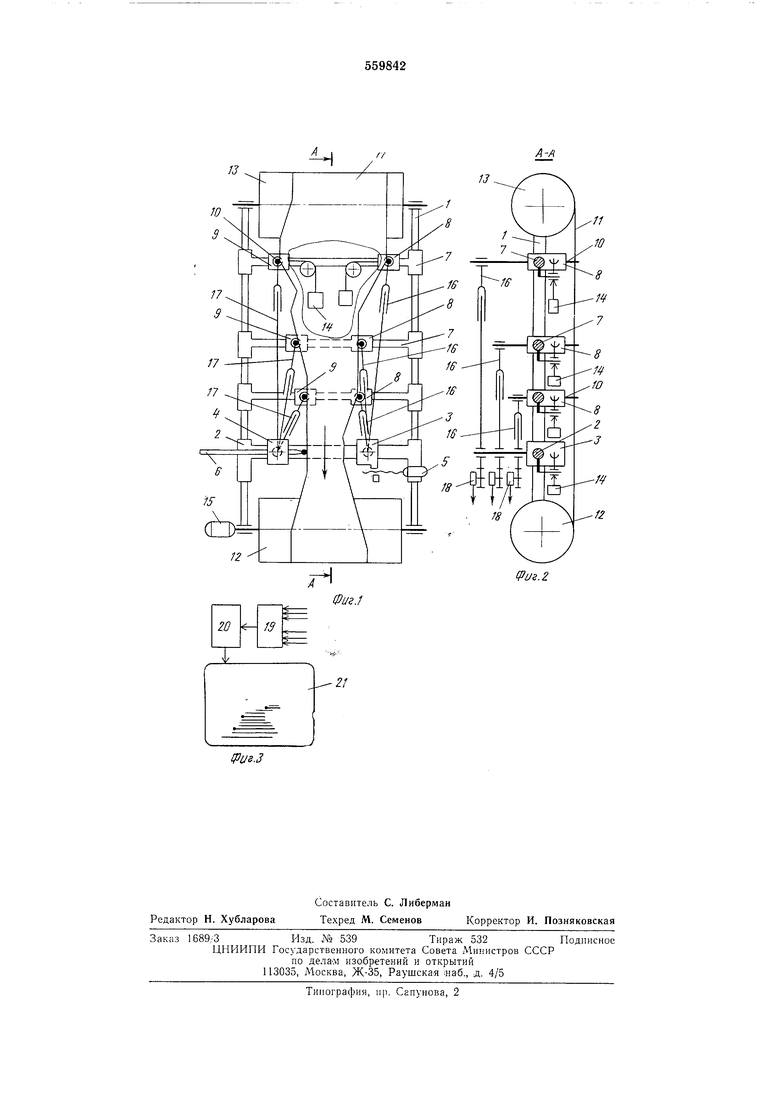
На фиг. 1 изображен предлагаемый прибор, общий вид; на фиг. 2 - разрез по А-А на фиг. 1; на фиг. 3 - пример перспективного изображения на экране индикатора телевизионного типа.
На неподвижных продольных направляющих 1 предлагаемого перспектографа установлена поперечная направляющая 2, определяющая положение центра проецирования. На ней подвижно установлены центральные каретки 3 и 4, имитирующие плановую и высотную проекции центра проецирования.
Каретка 3 имеет привод 5, а каретка 4 - щток 6, установленный на каретке подвижно с возможностью фиксации. На направляющих 1 установлены на определенных расстояниях от направляющей 2 поперечные направляющие 7. На последних подвижно установлены плановые каретки 8 и высотные каретки 9, которые несут наконечники 10. Таким же накоиечником заканчивается шток 6. Наконечники 10 опираются в кромку профилированной ленты 11, наматываемой на барабан 12 с барабана 13. Механический контакт наконечников 10 с кромкой ленты И обеспечивается с помощью противовесов 14. Барабан 12 снабжен приводом 15, управляемым от задатчика скорости протяжки ленты.
Каретки 8 соединены с каретками 3 и 4 телескопическими стержнями 16 и 17, кинематически связанными соответственно с датчиками 18 угла азимута, установленными на каретке 3, и датчиками угла места (на чертежах не показаны), установленными на каретке 4.
Датчики угла азимута и угла места электрически связаны через согласующие устройства 19 и схемы 20 совпадения с индикатором 21 телевизионного типа.
При необходимости на каретке 4 может быть установлен вместо штока 6 с наконечНИКОМ 10 привод, связанный с задатчиком вертикальной составляющей скорости. Также при необходимости привод 5 на каретке 3 может быть заменен штоком с наконечником. Перспектограф работает следующим Образом.
В качестве задающих параметров на него подаются: скорость протяжки ленты, имитирующая горизонтальную продольную составляющую скорости транспортного средства; направление проецирования в виде углов курса и тангажа Э для летательного аппарата; ширина полотна дороги; профиль и план дороги в виде профилированной ленты; скорость перемещения проекций центра проецирования в
виде поперечной и вертикальной составляющей скорости имитатора транспортного средства.
Скорость протяжки ленты обеспечивается приводом 15, перемещающим ленту в направлении, указанном на фиг. 1 стрелкой. Привод 5 обрабатывает поперечную составляющую скорости, перемещая каретку 3 вдоль направляющей 2, шток 6 - вертикальную составляющую скорости, перемещая каретку 4.
При этом стержни 16 и Г/ при помощи наконечников 10 отслеживают удаление кареток 3 и 4 от соответствующих кромок ленты, а связанные с ними датчики угла азимута и угла места отмечают величину этого удаления.
Нодвешенные щарнирно к кареткам в центре проецирования телескопические стержни 16 при помощи кареток 8 и наконечников 10 отслеживают соответствующие углы азимута и углы места выбранных текущих точек, а связанные с ними датчики азимута и угла места отмечают величины этих углов и подают их через согласующее устройство 19 и схемы 20 совпадения на телевизионный индикатор 21. Эти устройства обеспечивают получение на
экране светящейся метки, координаты которой соответствуют азимуту и углу места плановой и высотной проекций точки.
Длина светящейся метки задается через согласующие устройства, в зависимости от заданной ширины дороги и удаления точки от центра проецирования, т. е. от расстояния между соответствующей направляющей 7 и направляющей 2. Направление проецирования в виде углов курса и тангажа подается на согласующие устройства, которые смещают изображение на экране в нужную сторону на величину, соответствующую величине курса и тангажа.
Формула изобретения
1. Перспектограф, содержащий устройство индикации на светящемся экране, лентопротяжный механизм с нанесенными на его лен65 те плановой и высотной проекциями заданной
пространственной кривой, продольные направляющие с установленными на них с возможностью перестановки поперечными направляющими, одна из которых песет две .центральные каретки со следящими приводами, имитирующие плановую и высотную проекции центра проецирования, а на других поперечных направляющих установлены по две каретки со следящими устройствами для считыВания соответственно плановой и высотной проекций текущих точек заданной кривой, одна из которых связана телескопическим стержнем с соответствующей центральной каретКой, отличающийся тем, что, с целью расширения диапазона рещаемых задач, вторая каретка каждой поперечной направляющей также связана телескопическим стержнем со второй центральной кареткой, а каждый телескопический стержень имеет датчик угла поворота, например потенциометр, предназначенный для измерения на плановой про.екции угла азимута каждой текущей точки кривой относительно центра проецирования, а на высотной - угла места ее, при этом все датчики электрически соединены с устройством индикации, а последнее выполнено в виде индикатора «азимут-угол места телевизионного типа с соответствующими согласующими устройствами и схемами совпадения.
2. Перспектограф по п. 1, от л п ч а ю щ и и с я тем, что, с целью упрощения конструкции, лента лентопротяжного механизма имеет края, профиль которых выполнен но форме, соответствующей высотной и плановой проекциям заданной кривой, а следящее устройство каждой каретки выполнено в виде укрепленного на каретке наконечника, опирающегося на край ленты.
3.Перспектограф по пп. 1 и 2, отличающийся тем, что, с целью обеспечения эквидпстаитиого по крайней мере одной из проекций кривой перемещения проекции центра проецирования, следящий привод соответствующей центральной каретки выполнен в виде щтока с наконечником, опирающимся на край ленты, при этом щток установлен на каретке с всзмож-.ностью фиксации заданного расстоя1гия до края ленты.
4.Перспектограф по пп. 1-3, отличаю.щийся тем, что каретки имеют средства,
обеспсчиваюпше постоянный контакт накоиечников с краем ленты, например противовесы, о. Перспектограф по пп. 1-4, отличающийся т:м, что, с целью получения кинематической перспективы цплиндрической поверхности с горизонтальной образующей заданной длины и наиравляющей в виде пространственной кривой, заданной ее высотной и плановой проекциями, в схему устройства индикации
включен блок регул;грования длшы «высвечиваемых на экране меток в зависимости от заданной длины образующе:, и удаления данной точки от центра проецирования.
6. Перспектограф по пп. 1-5, отличающийся тем, что, с целью получения псевдотрехмсркой кпнсматической иерспективы, в с.хему устройства индикации включен блок регулирования яркости «высвечиваемых на экране меток в з:1В 1спмости от удаления данной текущей точки кривой от центра проецпрования.
/J
А-А
.f
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЕРСПЕКТОГРАФ | 1970 |
|
SU259404A1 |
| ПЕРСПЕКТОГРАФ | 1970 |
|
SU271811A1 |
| Способ определения планового положения точек объекта и устройство для его осуществления | 1981 |
|
SU979852A1 |
| СПОСОБ ЛОКАЛЬНОГО АЭРОМОНИТОРИНГА ГЕОТЕХНИЧЕСКИХ СИСТЕМ И БОРТОВОЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2227271C1 |
| Устройство для измерения твердости почвы | 2019 |
|
RU2717169C1 |
| СПОСОБ И УСТРОЙСТВО АЗИМУТАЛЬНО-УГЛОМЕСТНОЙ ИНДИКАЦИИ В ОПТИКО-ЛОКАЦИОННЫХ СИСТЕМАХ | 2015 |
|
RU2628301C2 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ВЕРТОЛЕТА В РЕЖИМЕ ВИСЕНИЯ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2244339C1 |
| СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ТОПОГРАФИИ ПОВЕРХНОСТИ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2208370C2 |
| АВИАЦИОННЫЙ КОМПЛЕКС ЭЛЕКТРОННОЙ ИНДИКАЦИИ | 2004 |
|
RU2264953C1 |
| УСТАНОВКА ДЛЯ ИЗМЕРЕНИЯ УГЛОВОГО ПОЛЯ ЗРЕНИЯ И КОНТРОЛЯ ВЕЛИЧИНЫ ШАГА ЛИНИЙ МИРЫ ТЕСТ-ОБЪЕКТА | 2013 |
|
RU2521152C1 |