точек объекта путем проецирования п редством оптического проектора изоб ражения элементов объекта, включающий ориентирование проектора путем совмещения в плоскости экрана опорт ных точек с их оптическим изображе нием, спроецированным с негатива, и формирование изображения точек объекта на экране посредством проецирования негативного изображения объекта. Известный способ реализуется с помощью оптического проектора, со держащего узел подвеса, проекционную камеру с осветителем, прикладной рамкой и объективом, и экран. Обязательным условием выполнения из i вестного способа является также наличие негативного изображения выносимого объекта t 3 J. Однако при выносе объекта в натуру имеются лишь его проектные координаты и нет реального снимка. Кроме того, при больших высотах проецирования технически сложно ориентировать проектор, проецируя изображение опорных точек с негатива на местность, Цел.ью изобретения является повышение производительности процесса, Указанная цель достигается тем, что согласно способу определения планового положения точек объекта путем проецирования с помощью оптического проектора изображения точек объекта, включающему ориентирование проектора по опорным точкам и формирование изображения точек элементов объекта на экране, перевычис ляют координаты двух опорных точек местности в систему координат картинной плоскости проектора, перевычисляют проектные координаты точек объекта в пространственную систему координат с началом в главной точке картинной плоскости, ориентируют проектор, совмещая в его картинной плоскости изображения опорных точек спроецированных с местности, с пере рестием нитей f-wKpocKonoB .проектора, установленных в соответствии с вычисленными в картинной плоскости проектора координатами опорных то чек, а проецирование точек объекта ведут путем формирования на экране посредством объектива проектора изображения неподвижной проекционной марки, совмещенной с главной ТОЧКОЙ картинной плоскости проектора, при этом объектив устанавлива-ют в положение, соответствующее вычисленному по проектным координатам проецируемых точек объекта, а экран устанавливают, на местности на заданном уровне проецируемой точки объекта, совмещают изображение проекционной марки с маркой экрана и осуществляют ортогональный перенос изображения проекционной марки с экрана на местность. Опорные точки на местности марки- . руют светящимися марками. Устройство для осуществления способа определения пространственного положения точек объекта, содержащее узел подвеса, проекционную камеру с последовательно установленными осветителем, прикладной рамкой и объективом, и экран, проекционная камеfpa снабжена тремя координатными каретками и двумя измерительными микроскопами, установленными на двух координатных каретках, которые размещены на прикладной рамке диагонально-противоположно друг другу и выполнены с возможностью перемещения микроспопов по осям X и У, а третья координатная каретка кинематически связана с объективом проектора и выполнена с возможностью его перемещения по осям X, У и Z, при этом экран выполнен в виде столика, установленного на координатной каретке с возможностью перемещения по осям X и У, и снабжен маркой и втулкой для крепления нивелира, а координатная каретка экрана смонтирована на телескопической стойке. Способ определения планового положения точек объекта заключается в последовательном оптическом проецировании на экран из некоторой точки пространства (центра проекции) (дискретных точек, которые в совокупности образуют макетный снимок, отражающий пространственное положение точек объекта на местности. При этом вычисление координат точек макетного снимка по проектным координатам точек объекта осуществляют на основе известных математических зависимостей (,-м) -2,.„;
5
где X; , у - плоские координаты
i-овой точки картинной - .- плоскости относительно
ее главной точки; f - фокусное расстояние проецирующей камеры; x,y,z - координаты центра проекции в принятой на местности пространственной системе координат; . координаты i-овой точки
трт 1М W
местности,
По заданным проектным координатам точек объекта на местности х- , YiM фокусному расстоянию проецирующей камеры и заданной высоте проецирования Н Z - z- вычисляют плоские координаты , у этих точек объекта в системе координат с началом в главной точке картинной плоскости
Х -
,Для выполнения процесса проецирования необходимо зафиксировать положение точек объекта в картинной плоскости,развернуть ее таким образом, чтобы направление осей системы координат картинной плоскости стало параллельно осям пространственной системы координат местности и поместить центр проекции в точку пространства с координатами х, у и z . Тогда проекция точек объекта, заданных в картинной плоскости, определит плановое положение точек на местности.
Определение пространственного поло жения центра проекции и угла поворота координатной системы картинной плоскости относительно системы координат местности осуществляют по опор ным точкам, положение которых известно на местности и вычислено для картинной плоскости. Для удобства ооиентирования опорные точки на местности маркируются светящимися марками и проецируются в картинную плоскость. Процесс ориентирования заключается в совмещении вычисленного для картинной плоскости положения опорных точек со спроецированным с местности их изображением...
Проецирование дискретных точек макетного снимка ведут посредством перемещения объектива проектора и
у852
установки его в положение, соответствующее предвычисленным координатам точек объекта. Этот путь более технологичен, так как отпадает необхо5 димость в изготовлении негативов.
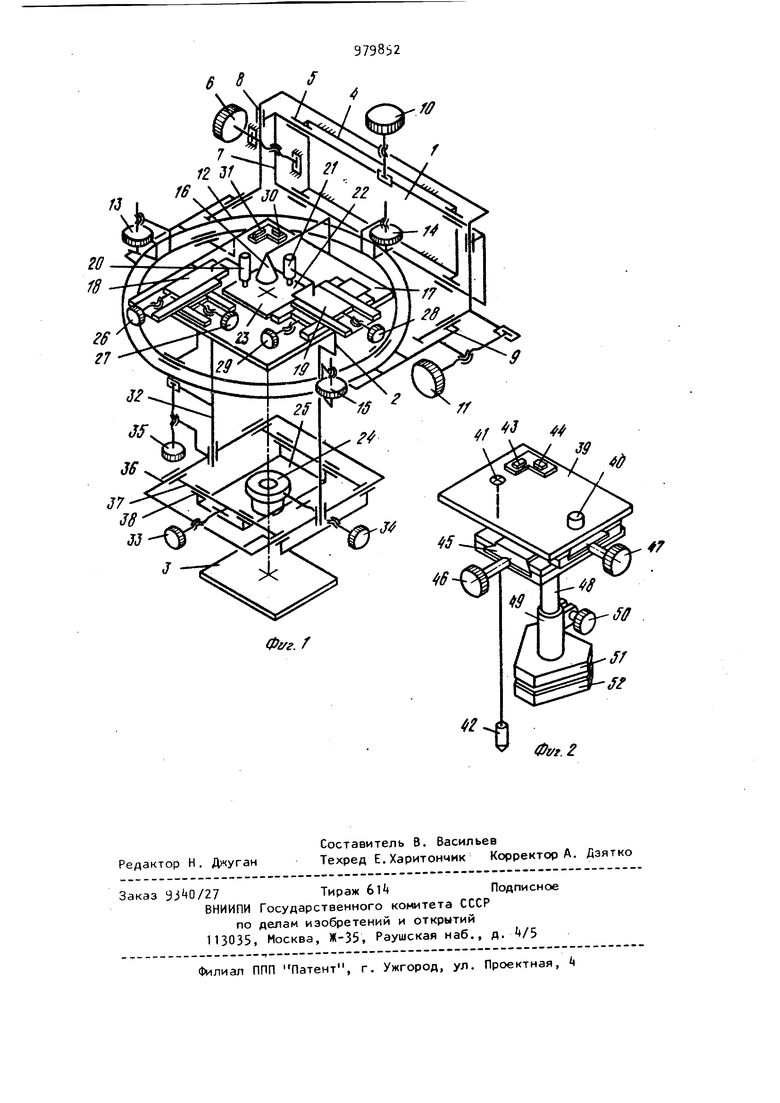
На фиг. 1 приведена кинематическая схема устройства для осуществления способа определения планового положения точек объекта; на фиг. экран, общий вид.
Устройство для осуществления способа определения планового положения точек объекта включает узел 1 подвеса, проекционную камеру 2 и эк5 ран 3 (фиг. 1).
Узел 1 подвеса служит для установки проекционной камеры 2 в рабочее положение и содержит основную платформу с направляющими 5, по кото20 рым может перемещаться в направлении оси X посредством вращения штурвала 6 каретка 7, несущая суппорты 8 и 9, выполненные с возможностью перек щения вдоль осе и У и Z посредством 25 вращения соответствующих штурвалов 10 и П. С салазкак суппорта 9 связано карданное кольцо 12, в котором установлена проекционная камера 2.
Карданное кольцо 12 при помощи 0 трех винтов 13-15 обеспечивает наклоны проецирующей камеры 2 на углы ei
и ю вокруг взаимно перпендикулярных осей и поворот на угол ае в горизонтальной плоскости.
Проекционнаг. камера 2 включает
5 осветитель 16, прикладную рамку 17 с двумя координатными каретками 18 и 19, несущими микроскопы 20 и 2, и матовой пластинкой 22 с проекцион0 ной маркой 23, а также объектив 2k, установленный на координатной каретке 25.
Координатные каретки 18 и 19 установлены на прикладной рамке 17 5 диагонально-противоположно друг другу и выполнены с возможностью перемещения микроскопов 20 и 21 по осям X и У. Микрометренные винты 26(Х), 27{У) , 28{У) и 29(Х)
служат для установки центров перекрестий нитей микроскопов 20 и 21 над точкой с заданными координатами на пластинке 22. Микрометренные винты 2б-29 можно заменить ходовыми винтами, а для отсчета линейных перемещений применять датчики линейных перемещений.
На прикладной рамке 17 жестко закреплены два цилиндрических уровня 30 и 31 с взаимно перпендикулярными осями, которые служат для приведения прикладной рамки 17 в горизонтальное положение. Прикладная рамка 17 проекционной 5 камеры 2 посредством направляющих 32 связана с координатной кареткой 25, несущей объектив 2k и выполненной с возможностью перемещения объектива 2 по осям X, У и Z , Мик- О рометренные винты 33{Х), 3(У) и 35(2) служат для установки объектива в точку с заданными координатами. Для отсчета величин линейных смещений микрометрённые винты 33 и 3 снабжены шкалами. Координатная каретка 25 представляет собой направляющие Зб, по которым перемещаются салазки 37 в направлении оси X, На салазках 37 перпендикулярно нап- 20 равлению X закреплены неподвижные направляющие, вдоль которых перемещаются салазки 38 в направлении оси У. На салазках 38 закреплен объектив 2. Перемещение объектива 25 2 эдоль оси Z производится по направляющим 32 при помощи микрометренного винта 35. Координатные каретки 18 и 19 выполнены аналогичным образом, толь- 30 ко отсутствуют направляющие для перемещения по оси Z. Переносный экран 3 (фиг. 2) состоит из столика 39, который несет на себе втулку 40 для установки ни- зз велира, марку tl, отвес 42 и два цилиндрических уровня 43 и 44. Столик 39 установлен на координатной каретке 45 с возможностью перемещения по осям X и У посредством вра- 40 щения соответствующих штурвалов (X) и 47(У). Координатная каретка 45 смонтирована на штанге 48 телескопической стойки 49 и может перемещаться по 45 оси Z посредством штурвала 50, Телескопическая стойка 49 служит для установки переносного экрана в трегере 51 штатива 52, Способ определения планового положения точек объекта осуществляют следующим образом. Предварительно вычисляют координаты двух опорных точек в системе координат картинной плоскости. Для чего из всей совокупности точек, поло жение которых необходимо определить на местности, выбирают две точки, кот ных мес спо мар ним пря ной опр изм той тем ти дин ют сот лен чал нат по где рые принимают в качестве опороложение этих точек выносят на ность известным геодезическим обом и маркируют светящимися ами.. Одну из опорных точек приют за начало пространственной оугольной системы координат Х, , и 2,а координаты второй опорточКи в этой системе координат деляют на .основе геодезических рений. оординать) опорной точки, приняза начало пространственной сискоординат, в картинной плоскосринимают равными Хд, Уд, а коорты второй опорной точки вычисляо формулам 2 2 ТТт- 2М -, гм- , 2- 21717/ координаты второй опорной точки; X, у, Z - координаты центра проекции в принятой на местности пространственной системе коорди. нат; /2 - фокусное расстояние проецирующей камеры, обеспечивающее резкое .. изображение второй опорной точки в картинной плоскости , 2 W i - - - ) гиоьб fpg- фокусное расстояние объектива. начение z принимается равным вы, на которой может быть установцентр проекции относительно напространственной системы коорди а величины X и У вычисляются ормулам z у f fg - фокусное расстояние, обеспечивающее резкое изображение в картинной плоскости опорной точки, принятой за начало пространственной системы координат fо f . Затем перевычисляют проектные коорд наты точек объекта в пространственную систему координат с началом в главной точке картинной плоскости п следующим формулам х;м-у ,jO с 1 72-2,-„-К 1M 2-г,„. фокусное расстояние проецир ющего устройства, обеспечивающее получение резкого изображения проецируемой то ки на переносном экране; k - выбранная, с точки зрения удобства работы, высота установки переносного экрана. Далее приступают к ориентировани проецирующего устройства. Дпя этого устройство с помощью узла 1 подвеса укрепляют, например, на мостовом кр не (при этом оператор находится на ходовой площадке), и устанавливают над местностью, на которой требуется определить заданное плановое положе ние точек. Выполняют горизонтирование проецирующего устройства с помощью двух цилиндрических уровней 30 и 31 с взаимно перпендикулярными ося ми и трех винтов t3-15. Вращая микро метренные винты 2б-29 устанавливают микроскопы 20 и 21 в положение, соот ветствующее координатам двух опорных точек в картинной плоскости (плоскости матовой пластинки 23). Перекрестия нитей микроскопов 20 и 21 задают положение опорных точек в плоскости матовой пластинки 23. Вращением микрометренного винта 35 устанавливают, последовательно фокусные расстояния, обеспечивающие получение резкого изображения двух опорных точек в пло скости матовой пластинки 23 и, наблюдая в микроскопы 20 и 21, приступают к совмещению спроецированных с местности изображений опорных точек с перекрестием нитей, соответствующих микроскопов. Это осуществляется вращением проецирующей камеры в карданном кольце 12 вокруг вертикальной оси, перемещениями каретки 7, суппортов 8 и 9, штурвалами 6, 10 и 11. Ориентирование выполняется последовательными приб210лижениями до тех пор, пока величины несовпадений станут меньше 0,0t мм. После чего приступают к проецированию точек объекта на местность. Н крометренными винтами 33 и 3 перемещают координатную каретку 2у, несущую объектив 2 по осям X, У, и тем caMJM устанавливают объектив 2k в положение, соответствующее перевычисленным плановым координатам проецируемой точки. Микрометренным винтом 35 перемещают координатную каретку 25 по оси Z и устанавливают рассчитанное фокубное расстояние. Включают осветитель 16 и проецируют проекционную марку 23 на переносный экран. При этом переносный экран 3 устанавливают на местности так, чтобы изображение проецируемой на местность точки попадало на стол 39. Затем стол 39 экрана 3 при помощи уровней . и Ц приводят в горизонтальное положение. Во втулку О устанавливают нивелир, а на исходном репере помещают нивелирную рейку. С помощью штурвала 50 наблюдатель регулирует высоту стола 39 и устанавливает его таким образом, чтобы отсчет по рейке был равен заданному А лН + k + i, где дН - разность заданной отметки точки и отметки репера; k - выданная высота установки переносного экрана i - высота визирной оси ниоелира относительно поверхности стола. Затем, вращая штурвалы k6 и 47, совмещают изображение спроецированной на -поверхность стола 39 проекционной марки 23 с центром марки 1, после чего, одним из известных способов, например, с помощью отвеса Ц2, выполняют ортогональный перенос центра проекционной марки 23 на местность. Аналогичным образом выпол няют вынос в натуру и остальных точек объекта. В связи с отсутствием проектных разработок в СССР и аналогичных разработок за рубежом в качестве (базового принят геодезический способ выноса в натуру планового положения точек инженерных сооружений. При использовании геодезического метода для выноса на местность njinнового положения точек инженерных сооружений необходимо производить большой объем высокоточных угловых и линейных измерений, кроме того, трудоемкость работы возрастает всле ствие сложной конфигурации сооружений. Так, бригада в составе инженера и двух-трех рабочих за смену вын сит на местность около 50 точек соо ружения. Отсутствие автоматизации процессов работы приводит к снижени -объективности результатов. По расчетным данным изобретение позволяет сократить затраты времени на производство работ примерно в 2 раза, уменьшить состав бригады до двух человек, снизить затраты средств в k раза. Использование вычислительной техники позволяет полностью автоматизировать вычислитель ный процесс, повысить надежность результатов и культуру производства. Сокращение времени на выполнение разбивочных работ непосредственно сказывается на сроках возведения сооружения в целом. Формула изобретения 1. Способ определения планового положения точек объекта путем проецирования с помощью оптического про ектора изображения точек объекта, включающий ориентирование проектора по опорным точкам и формирование изображения точек элементов объ екта на экране, отличающий ся тем, что, с целью повышения пр изводительности процесса, перевычис ляют координаты двух опорных точек местности в систему координат карти ной плоскости проектора, перевычисляют проектные координаты точек объекта в пространственную систему ординат с началом в главной точке картинной плоскости, ориентируют пр ектор, совме.щая в его каотинной плоскости изображения опорных точек спроецированных с местности, с пере рестием нитей микроскопов проектора, установленных в соответствии с вычисленными в картинной плоскости проектора координата/ опорных точек, а проецирование точек объекта ведут путем формирования на экра не посредством объектива проектора 212 изображения неподвижной проекционной марки, совмещенной с главной точкой картинной плоскости проектора, при этом объектив устанавливают в положение, соответствующее вычисленному по проектным координатам проецируемых точек объекта, а экран устанавливают на местности на зацанном уровне проецируемой точки объекта, совмещают изображение проекционной марки с маркой экрана и осуществляют ортогональный перенос изображения проекционной марки с экрана на местность, 2. Способ по п. 1,отличающ и и с я тем, что опорные точки на местности маркируют светящимися марками . 3. Устройство для осуществления способа определения планового положения точек объекта, содержащее узел подвеса, проекционную камеру с последовательно установленными осветителем, прикладной рамкой и объективом, и экран, отличающ е 6 с я тем, что проекционная камера снабжена тремя координатными каретками и двумя измерительными микроскопами, установленными на двух координатных каретках, которые размещены на прикладной рамке диагонально-противоположно друг к другу и выполнены свозможностью перемещения микроскопов по осям X и У, а третья координатная каретка кинематически связана с объективом проектора и выполнена с возможностью его перемещения по осям X, У и Z, при этом экран выполнен в виде столика, установленного на координатной каретке с возможностью перемещения по осям X и У, и снабжен маркой и втулкой для крепления нивелира, а координатная каретка экрана смонтирована на телескопической стойке. Источники информации, принятые во внимание при экспертизе 1. Инженерная геодезия. Под ред. П. С. Закатова. М., Недра, 1969, с. 2 9-268. 2.МИНИОВИЧ А.С. Фотограмметрический метод в судостроении и судоремонте. Ленинград, Судпромиздат, I960. 3. Справочник геодезиста. Под ред. В. Д. Большакова, М., Недра, 1966, с. (прототип).
Фег.г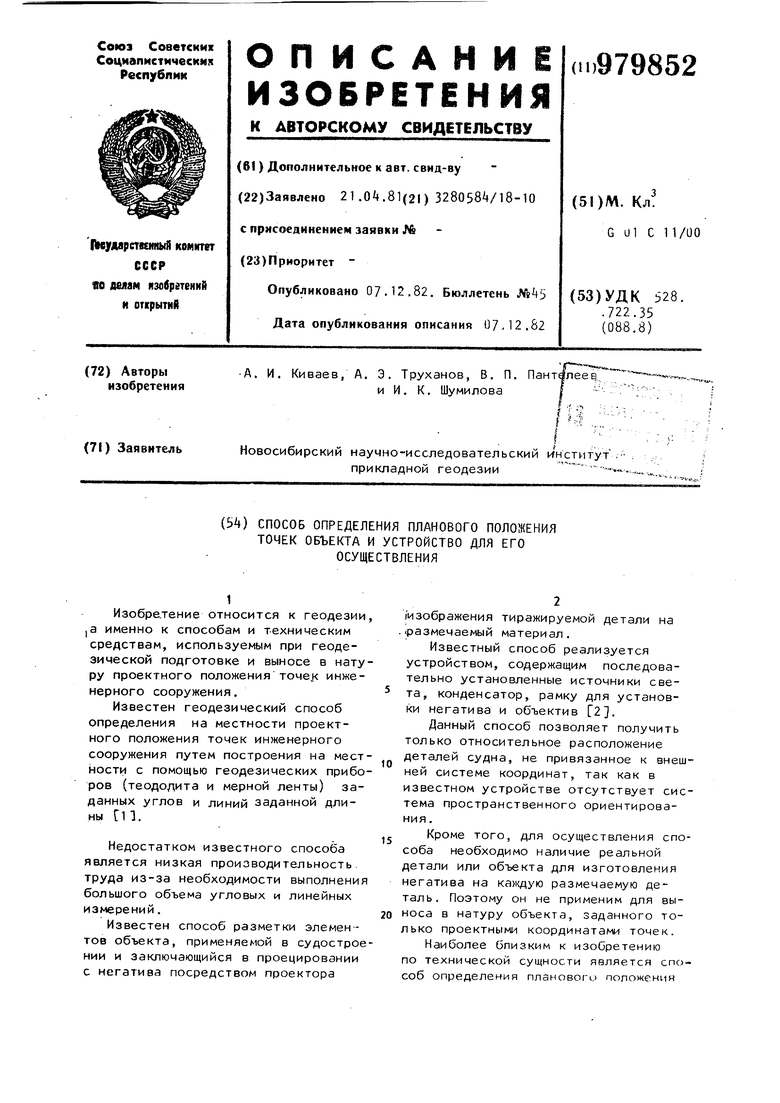
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для разбивочных работ в строительстве | 1984 |
|
SU1224583A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ГОЛОГРАФИЧЕСКОГО ПРОЕКЦИОННОГО ЭКРАНА ДЛЯ ДЕМОНСТРАЦИИ ТРЕХМЕРНЫХ ЦВЕТНЫХ ИЗОБРАЖЕНИЙ | 2006 |
|
RU2316033C1 |
| СПОСОБ ИЗМЕРЕНИЯ ФОРМЫ И ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ПОВЕРХНОСТИ ОБЪЕКТА | 1999 |
|
RU2148793C1 |
| ЭЛЕКТРОННО-ПРОЕКЦИОННЫЙ СПОСОБ ИЗМЕРЕНИЯ ФОРМЫ И ПЕРЕМЕЩЕНИЙ ПОВЕРХНОСТИ ОБЪЕКТА | 1992 |
|
RU2065570C1 |
| ЦИФРОВОЙ СПОСОБ СОЗДАНИЯ НЕИСКАЖЕННЫХ ПРОЕКЦИЙ НА ПОВЕРХНОСТИ РЕАЛЬНЫХ ОБЪЕКТОВ | 2023 |
|
RU2821838C1 |
| Способ разметки деталей приварного насыщения на поверхности в помещении судна | 1990 |
|
SU1795282A1 |
| АБЕРРОМЕТР С СИСТЕМОЙ ТЕСТИРОВАНИЯ ОСТРОТЫ ЗРЕНИЯ (ВАРИАНТЫ), УСТРОЙСТВО И СПОСОБ ЕГО НАСТРОЙКИ | 2004 |
|
RU2268637C2 |
| СПОСОБ ОПТИЧЕСКОГО ИЗМЕРЕНИЯ ФОРМЫ ПОВЕРХНОСТИ | 2010 |
|
RU2448323C1 |
| СТЕРЕОПРОЕКЦИОННАЯ СИСТЕМА | 2005 |
|
RU2322771C2 |
| СПОСОБ ПРОЕЦИРОВАНИЯ ИЗОБРАЖЕНИЯ НА ПОВЕРХНОСТИ РЕАЛЬНЫХ ОБЪЕКТОВ | 2009 |
|
RU2433487C2 |