Изобретение относится к области автоматизации драг, а .именно к устройствам, обеспечивающим опускание черпаковой рамы на заданную ;величину и постоянный контроль за процессом слоевой выемки породы.
Эффективность отработки забоя черпающим аппаратом драги при слоевой выемке пород в основном зависит от принятой величины опускания черпаковой рамы, определяющей толщину -слоя породы, снимаемого черпаками за оди.н ход драги по забою. Однако применение оптимальных параметров слоевой выемки, строго соответствующих конкретным горно-геологическим условиям месторождения, затруднено из-за отсутствия надежных и достаточно точных приборов управления рамным подъемником, обеспечивающих опускание черпаковой рамы на заданную величину и постоянный контроль за процессом слоевой выемки пород. В практике дражных работ эти операции производят драгером визуально по величине перемещения полиспаста подвеса рамы ил-и по степени наполнения черпаков. Такой метод контроля ставит процесс черпания в прямую зависимость от квалификации навыков обслуживающего персонала драги ,и особо драгера.
рамным подъемником и оптимизации параметров опускания черпаковой рамы за забой в предлагаемом устройстве используется непосредственная связь металлического троса
рамного подъемника с электронным устройсгвом с помощью меток, наносимых и считываемых электромагнитными датчикам-и, которые выполнены в виде магнитных головок, на указанный трос. Точность определения величины
послойного опускания черпаковой рамы зависит от принятого расстояния между магнитными метками, нанесенными на рамоподъемный трос. Минимальное целесообразное расстояние между магнитными метками принимается в зависимости от длины записывающей магнитной головки. Напри.мер, при длине головки МО мм расстояние равно 336 мм. Учитывая, что подвес черпаковой рамы осуществлен через 8-12-кратный полиспаст, точность
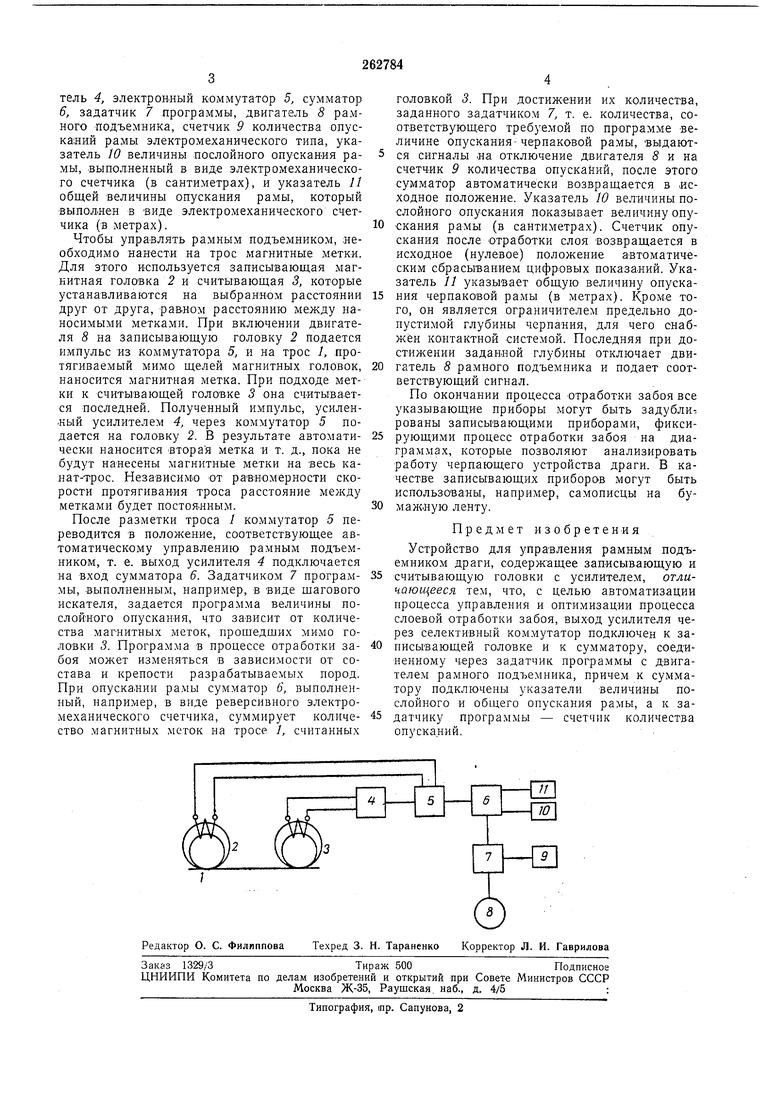
замера, или цена деления указателя величины опускания рамы в указанном конкретном случае будет находиться в пределах 42-28 мм, что вполне допустимо. Па чертеже изображена электрическая схема предлагаемого устройства.
Устройство содержит металлический трос / рамного подъемника, выполняющий роль магнитного носителя, записывающую магнитную головку 2, -считывающую магнитную головку
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ дражной разработки техногенных запасов | 2019 |
|
RU2700152C1 |
| Способ дражной разработки техногенных запасов | 2020 |
|
RU2723839C1 |
| Дражное комплексное устройство | 1979 |
|
SU817154A1 |
| Черпающее устройство драги | 1977 |
|
SU732450A1 |
| Устройство для определения глубины опускания черпаковой рамы | 1990 |
|
SU1784719A1 |
| УСТРОЙСТВО для КОНТРОЛЯ НАПОЛНЕНИЯ ЧЕРПАКОВДРАГИ | 1970 |
|
SU258963A1 |
| ПЛАВУЧИЙ МНОГОЧЕРПАКОВЫй ЭКСКАВАТОР | 1969 |
|
SU255857A1 |
| Способ дражной разработки запасов в бортах выработки | 2018 |
|
RU2674452C1 |
| Устройство для улавливания черпаков при обрыве черпаковой цепи драги | 1973 |
|
SU504872A1 |
| СПОСОБ РАЗРАБОТКИ АЛМАЗОНОСНЫХ КИМБЕРЛИТОВЫХ ТРУБОК | 1994 |
|
RU2081321C1 |
