Изобретение относится к горнодобывающей промышленности и может быть использовано при разработке россыпных месторождений золота, платины, алмазов и других драгоценных полезных ископаемых многочерпаковыми драгами
Известно устройство для контроля глубины черпания, включающее указатель глубины посредством рычажного механизме соединенный с черпаковой рамой. Глубина черпания определяется по углу наклона черпаковой рамы относительно понтона драги.
Недостатком вышеуказанного устройства является низкая точность измерения за счет люфтов в рычажной системе измерителя
Известно другое устройство контроля глубины черпания по углу наклона черШКЬ- вой рамы с использованием гироскопической вертикали. Гировертикаль
устанавливается на специальной площадке, укрепленной на черпаковой раме.
Недостатком данного устройства является малый срок службы гировертикали, необходимость использования специальных приборов для выравнивания площадки под гировертика Ль, а также необходимость демпфирования вибраций, которые передаются во время работы на черпаковую раму -в процессе черпания грунта. Все перечисленное приводит к появлению существенной погрешности при измерении.
Известно также устройство для определения глубины черпания дражного забоя, включающее маятниковый датчик глубины, измерители дифферента и осадки драги и указатель глубины. Маятниковый датчик глубины соединен посредством сельсинной передачи с указателем глубины, включающим сельсин-приемник, суммирующий блок, усилитель и исполнительный двигаXJ00
&ь
Ч
Ю
тель, кинематически соединенный с указателем глубины.
Недостатком этого устройства является наличие колебаний маятникового датчика глубины при вибрациях черпаковой рамы в 5 процессе работы, что вносит погрешность в показания прибора. Для устранения колебаний маятника приходится применять спе- циальные демпферы, например, гидравлические, что приводит к существен- 10 iJariasflbiBaHvmM в измерении при оче- редй$м Опускании черпаковой рамы в забойТчто приводит также к погрешности в измерении.
Наиболее близким к предложенному я в- 15 ляется устройство для определения глубины опускания черпзковой рамы, включающее сельсин-датчик, соединенный сельсином приемником, измерители осадки и дифферента и указатель глубины. Сельсин-датчик 20 соединен непосредственно с валом барабана рамоподъемной лебедки, обороты которого через сельсинную пару передаются на указатель глубины. Глубина опускания черпаковой рамы измеряется по углу поворота 25 вала барабана лебедки.
Погрешность контроля глубины опускания черпаковой рамы возникает вследствие изменения геометрии рамоподъемного ка- ната и многослойности навивки каната на 30 барабан рамоподьемной лебедки, что приводит к изменению передаточного коэффициента между углом поворота вала барабана и глубиной опускания черпаковой рамы.35
Целью изобретения является повышение точности контроля за счет устранения . влияния изменения геометрии рамоподъемного каната и многослойности навивки каната на барабан рамоподъемной лебедки. 40
Поставленная цель достигается тем, что известное устройство, включающее сельсин-датчик, соединенный с сельсином при- емником, измерители осадки и дифферента, соединенные соответственно с первым и 45 вторым входами суммирующего блока, и указатель глубины, снабжено датчиком радиуса наеивки каната на барабан рамоподьемной лебедки, задатчиком превышения верхнего блока черпаковой рамы над верх- 50 ним барабаном черпаковой рамы, потенциометром, блоком умножения и функциональным блоком, причем сельсин- приемник через потенциометр соединен с первым входом блока умножения, со вто- 55 рым входом которого соединен датчик ради- усэ навивки каната на барабан рэмоподъемной лебедки, выход блока умножения через функциональный блок подключен к третьему входу суммирующего блока,
к четвертому входу которого подключен за- датчик превышения верхнего блока черпаковой рамы над верхним барабаном черпаковой рамы, а выход суммирующего блока соединен с указателем глубины.
Включение в устройство контроля глубины опускания черпаковой рамы датчика радиуса навивки каната на барабан рамоподьемной лебедки и блока умножения, а также задатчика превышения верхнего блока черпаковой рамы над верхним барабаном черпаковой рамы и функционального блока позволяет исключить погрешность измерения от изменения радиуса навивки каната на барабан и изменения геометрии рамоподъемного каната и повысить точность контроля.
Сопоставительный анализ с прототипом показывает, что заявляемое устройство отличается дополнительным введением датчика радиуса навивки каната на барабан рамоподьемной лебедки, потенциометром, блоком умножения, задатчиком превышения верхнего блока черпаковой рамы над верхним барабаном черпаковой рамы и функциональным блоком.
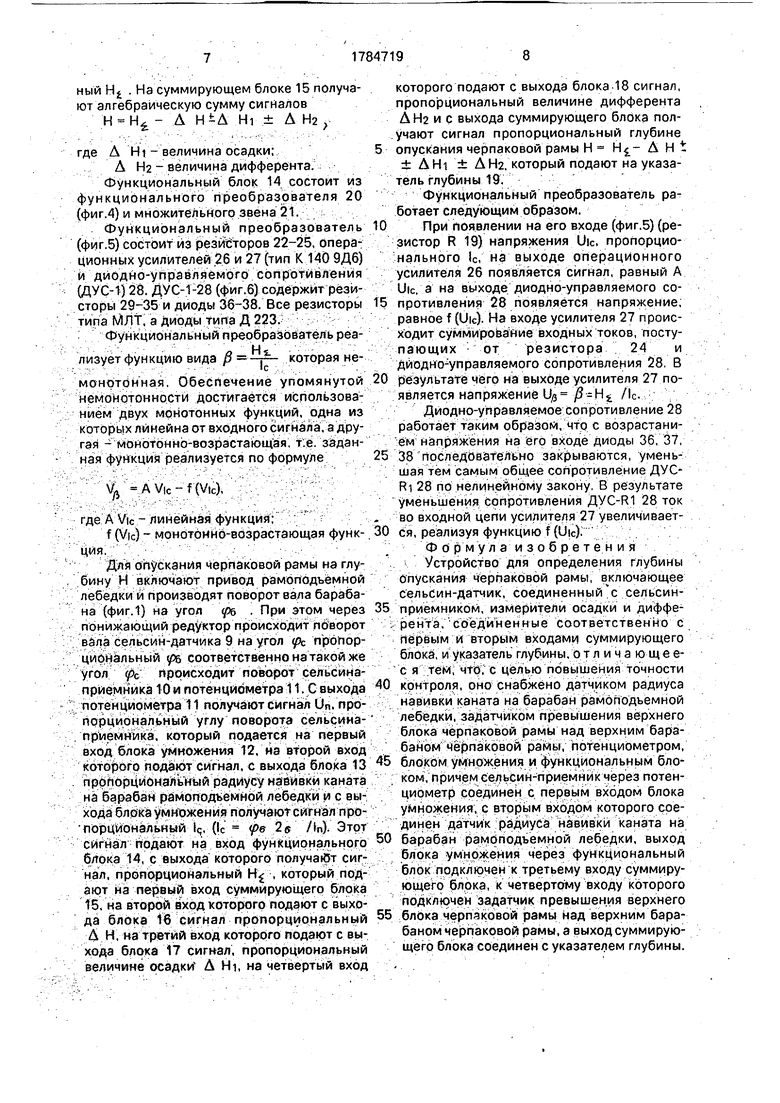
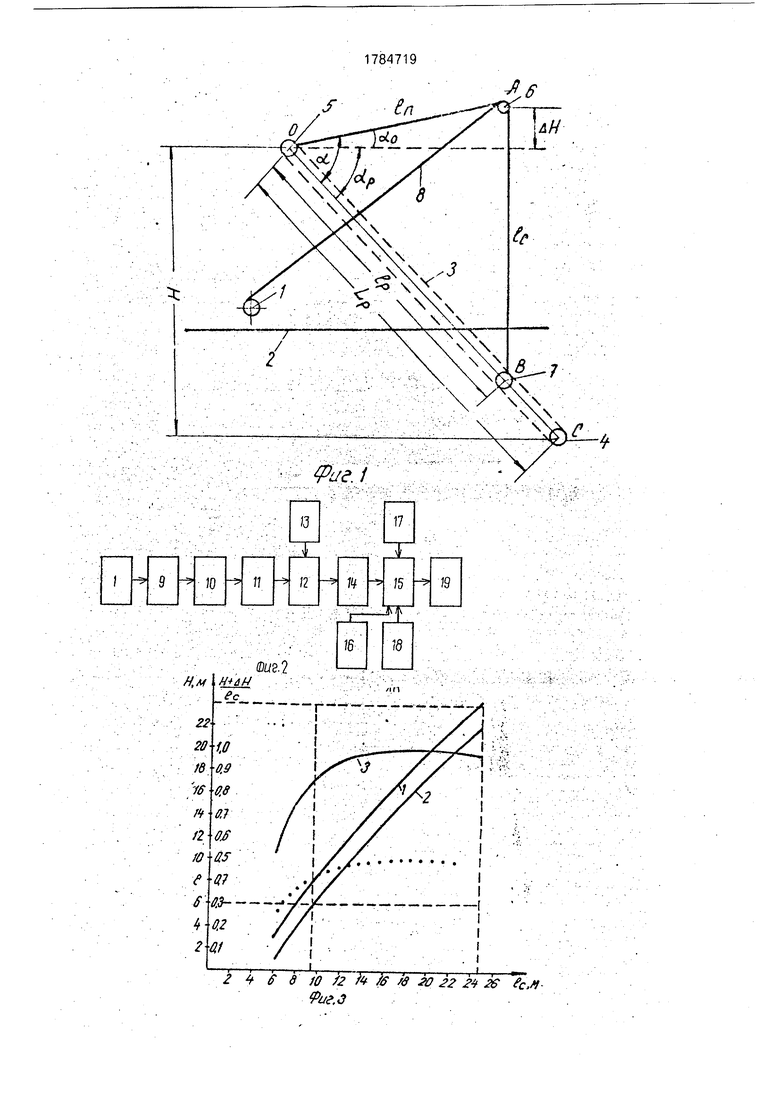
На фиг.1 показана схема движения черпаковой рамы; на фиг.2 - блок-схема устрой- ства; на фиг.З приведены графики зависимости 1 Н f (Ic); Н f (Ic),
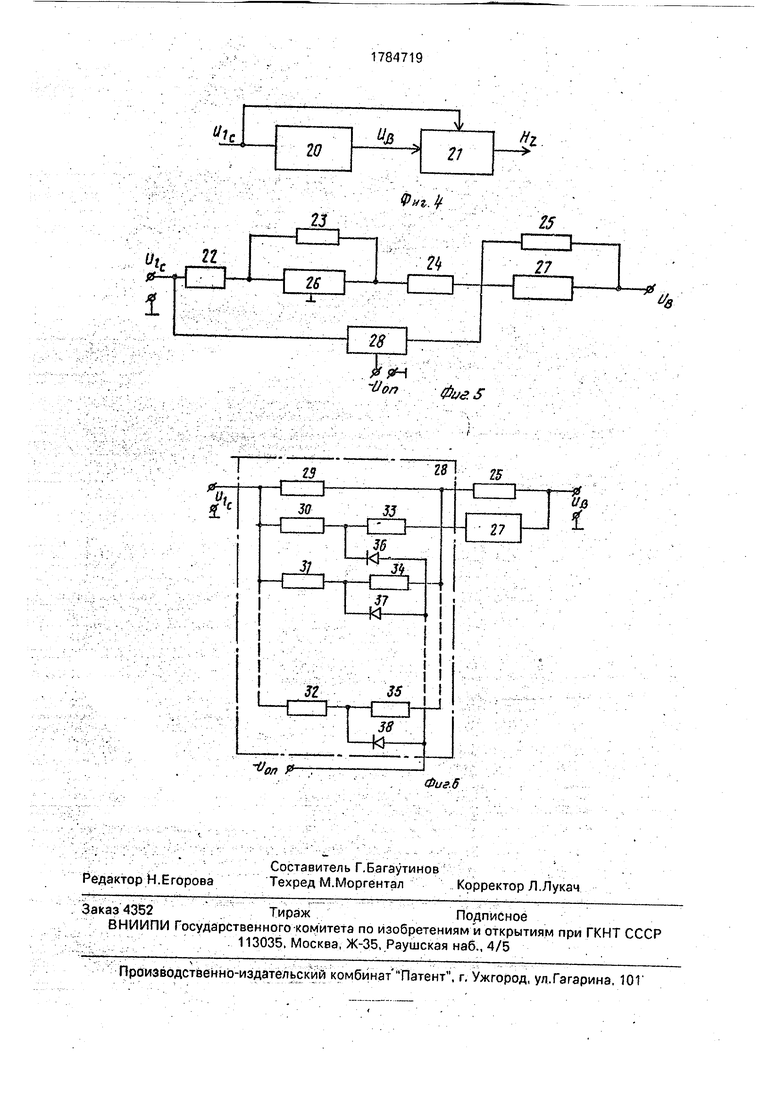
Н Р -Ј- f (Ic); на фиг.4 изображена схема
функционального блока; на фиг.5 - блок- схема функционального преобразователя; на фиг.6 - схема диодно управляемого сопротивления.
На фиг.1 показано: 1- барабан рамоподъемной лебедки; 2 - понтон, 3 - черпа- ковая рама, 4 - нижний барабан черпаковой рамы, 5 - верхний барабан черпаковой рамы, б и 7 - верхний и нижний блоки подвеса черпаковой рамы, 8 - канат.
Устройство для определения глубины опускания черпаковой рамы содержит сельсин-датчик 9, жестко связанный через понижающий редуктор (на чертеже не показан) с валом барабана рамоподъемной лебедки 1, сельсин-приемник 10, потенциометр 11, жестко связанный с сельсином приемником 10, блок умножения 12, датчик радиуса навивки каната на барабан рамоподъемной лебедки 13, функциональный блок 14, суммирующий блок 15, задатчик превышения верхнего блока черпаковой рамы над верхним барабаном черпаковой рамы А Н-16, измеритель осадки 17, измеритель дифферента 18, расположенные на понтоне. Сель- син-датчик и сельсин-приемник электрически связаны между собой и работают в следящем режиме С валом ротора сельсина-приемника 10 жестко связан потенциометр 11. Выход потенциометра 11 соединен с первым входом блока умножения 12, второй вход которого соединен с выходом датчика радиуса навивки каната на барабан 13, а выход блока умножения соединен со входом функционального блока 14, выход которого соединен с первым входом суммирующего блока 15, второй вход которого соединен с выходом задатчика 116, третий вход соединен с выходом измерителя осадки 17, четвертый вход соединен с выходом измерителя дифферента 18, а выход суммирующего блока соединен со входом указателя глубины 19.
В качестве сельсинной передачи используются, например, бесконтактные сельсины типа БД-40, В качестве потенциометра используется высокоточный прецези- онный потенциометр типа ПЛП-21. В качестве измерителя осадки может быть использован, например, индукционный уровнемер, а в качестве измерителя дифферента - маятниковый дифферентомер. В качестве блока умножения 11 используется известный блок. В качестве задатчика Н 16 используется потенциометр. В качестве суммирующего блока 15 используется, например, магнитный усилитель с несколькими обмотками управления. В качестве функционального блока 14 используется известный блок. В качестве датчика радиуса навивки каната 13 на барабан рамоподъем- ной лебедки используется датчик. Понижающий редуктор подбирается с передаточным числом, обеспечивающим один оборот сельсина-датчика при опускании черпаковой рамы на полную глубину.
Контроль глубины опускания чёрпако- вой рамы по углу поворота вала барабана рамоподьемной лебедки осуществляется следующим образом.
Длина развиваемого каната 8 при опускании черпаковой рамы на глубину Н будет
к рбГ-&,
0),
где IK - длина каната;
р 6 - угол ловорота вала барабана; re - радиус навивки каната на барабан.
fn lc,
(2),
где in - передаточное число полиспаста черпаковой рамы;
1С - расстояние между верхними 6 и нижними 7 блоками.
1с (3)
П
Тогда расстояние между верхними и нижними блоками
Ic2 - In2 + 1Р2 - 21П Ip cos a , (4),
где 1с АВ; In - ОА; 1Р 0В; а а р + а0 Глубина опускания черпаковой рамы Н. Н Lp sin а р , (5),
где Lp OC, ар а - а0 Совместное решение (4, 5) дает зависимость между 1к и Н
{2 ,2 ,2
Н Lp sin (arccos % , ..
/ In I
а о) (6),
При горизонтальном положении черпаковой рамы ( #р 0 ,п GO) расстояние по высоте от верхних блоков до черпако- 25 вой рамы ( ар - О, с а о )
А Н 1П sin #,
(7)
Суммарная глубина опускания черпако- 3Q вой рамы относительно верхних блоков 6
|2 |2 ,2 «с in с
Hz Н + Д Н Lp sin (arccos Vi . t P )
In Ip
+ A H(8)
Для конкретной драги значения конструктивных параметров Ln. In. Ip , or0, in известны. Это дает возможность рассчитать и построить зависимость между HЈ , Н и I для конкретной драги. На фиг.З приведен график зависимости, где 1 - Н f (lc); 2 - НЈ
f(tc)n3-Ј
- Й.
f (1С) для драги 380 л.
Таким образом, имея расчетный график заН
висимости /3 -Д- f (1С) можно по каждому значению 1с определить соответствующее значение HЈ и Н.
Рабочий диапазон опускания черпаковой рамы для драги 380 л составляет в диа пазоне Н 6-24 м, что соответствует диапазону изменения 1С 9,5-24,5 м (фиг.З).
В предлагаемом устройстве функциональный блок 14 реализует зависимость
Н f (lc), причем на вход блока 14 подают
сигнал, пропорциональный с, и на входе
блока 14 получают сигнал, пропорциональный HЈ . На суммирующем блоке 15 получают алгебраическую сумму сигналов H HЈ - А Hi ± А Н2
где A Hi - величина осадки;
А На - величина дифферента.
Функциональный блок 14 состоит из функционального преобразователя 20 (фиг.4) и множительного звена 21.
Функциональный преобразователь (фиг.5) состоит из резисторов 22-25, операционных усилителей 26 и 27 (тип К 140 9Д6) и диодно-управляемого сопротивления (ДУС-1) 28. ДУС-1-28 (фиг.6) содержит резисторы 29-35 и диоды 36-38. Все резисторы типа МЛТ, а диоды типа Д 223.
Функциональный преобразователь реа11
лизует функцию вида j$ -р- которая немонотонная. Обеспечение упомянутой немонотонности достигается использованием двух монотонных функций, одна из которых линейна от входного сигнала, а другая - монотонно-возрастающая, т.е. заданная функция реализуется по формуле
V/i - A Vie -f (Vic),
где A Vic - линейная функция;
f (V|C) - монотонно-возрастающая функция.
Для опускания черпаковой рамы на глубину И включают привод рамоподъемной лебедки и производят поворот вала барабана (фиг.1) на угол фъ . При этом через понижающий редуктор происходит поворот вала сельсин-датчика 9 на угол рс пропорциональный да соответственно на такой же угол (рс происходит поворот сельсина- приемника Юи потенциометра 11. С выхода потенциометра 11 получают сигнал Un. пропорциональный углу поворота сельсина- приемника, который подается на первый вход блока умножения 12, на второй вход которого подают сигнал, с выхода блока 13 пропорциональный радиусу навивки каната на барабан рамоподъемной лебедки и с выхода блока умножения получают сигнал про- чпорциональный Ц, (с - рв 2$ /tn). Этот сигнал подают на вход функционального б/тока 14, с выхода которого получают сигнал, пропорциональный Н , который подают на первый вход суммирующего блока 15, на второй вход которого подают с выхода блока 16 сигнал пропорциональный А Н, на третий вход которого подают с выхода блока 17 сигнал, пропорциональный величине осадки1 A Hi, на четвертый вход
которого подают с выхода блока 18 сигнал, пропорциональный величине дифферента АН2 и с выхода суммирующего блока получают сигнал пропорциональный глубине
опускания черпаковой рамы Н А Н t ± AHi ± А На, который подают на указатель глубины 19.
Функциональный преобразователь работает следующим образом.
При появлении на его входе (фиг.5) (резистор R 19) напряжения Uic. пропорционального Ic, на выходе операционного усилителя 26 появляется сигнал, равный А Die. а на выходе диодно-управляемого сопротивления 28 появляется напряжение, равное f (Uic). На входе усилителя 27 происходит суммирование входных токов, поступающих от резистора 24 и диодно-управляемого сопротивления 28 В
результате чего на выходе усилителя 27 появляется напряжение U/j Лс.
Диодно-управляемое сопротивление 28 работает таким образом, что с возрастанием напряжения на его входе диоды 36, 37,
38 последовательно закрываются, уменьшая тем самым общее сопротивление ДУО RI 28 по нелинейному закону В результате уменьшения сопротивления ДУС-Н1 28 ток во входной цепи усилителя 27 увеличивается, реализуя функцию f (Uic).
Ф о р м у л а и з о б р е т е н и я Устройство для определения глубины Опускания черпаковой рамы, включающее сельсин-датчик, соединенный с сельсинприемником, измерители осадки и дифферента, соединенные соответственно с первым и вторым входами суммирующего блока, и указатель глубины, отличающее- с я тем, что. с целью повышения точности
контроля, оно снабжено датчиком радиуса навивки каната на барабан рамоподьемной лебедки, задатчиком превышения верхнего блока черпаковой рамы над верхним барабаном черпаковой рамы, потенциометром,
блоком умножения и функциональным блоком, причем сельсин-приемник через потенциометр соединен с первым входом блока умножения, с вторым входом которого соединен датчик радиуса навивки каната на
барабан рамоподъемной лебедки, выход блока умножения через функциональный блок подключен к третьему входу суммирующего блока, к четвертому входу которого подключен задатчик превышения верхнего
блока черпяковой рамы над верхним барабаном черпаковой рамы, а выход суммирующего блока соединен с указателем глубины.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения угла разворота свайной драги | 1990 |
|
SU1758172A1 |
| Устройство для контроля скорости бокового перемещения свайной драги | 1985 |
|
SU1288273A1 |
| Способ автоматического поддержания оптимального отношения линейных скоростей бокового перемещения и черпаковой цепи драги и устройство для его осуществления | 1984 |
|
SU1218360A1 |
| Устройство автоматического поддержания оптимального отношения линейных скоростей бокового перемещения и черпаковой цепи драги | 1980 |
|
SU899756A1 |
| Устройство регулирования производительности драги | 1986 |
|
SU1372018A1 |
| Устройство для регистрации ширины дражного забоя | 1982 |
|
SU1082917A1 |
| Способ автоматического поддержанияОпТиМАльНОгО ОТНОшЕНия лиНЕйНыХСКОРОСТЕй бОКОВОгО пЕРЕМЕщЕНияи чЕРпАКОВОй цЕпи дРАги | 1979 |
|
SU798236A1 |
| Устройство для контроля угла разворота свайной драги | 1987 |
|
SU1506030A1 |
| Устройство определения крепости грунта при драгировании | 1987 |
|
SU1458513A1 |
| Прибор для автоматической зарисовки профиля забоя при драгировании | 1980 |
|
SU874887A1 |
Устройство для определения глубины опускания черпаковой рамы. Сущность изобретения: устройство содержит рамоподъ- емную Лебедку, сельсин-датчик, сельсин-приемник, потенциомер, блок умножения, датчик радиуса навивки каната на барабан, функциональный блок, суммирующий блок, измеритель осадки, указатель глубины, задатчик превышения верхнего блока черпаковой рамы над верхним барабаном черпаковой рамы, измеритель дифферента 6 ил.
Фиг.1
2 4 ff в fO /2 fo fc /4 20 22 & 2$ ec,tt
Риг.з
| Устройство для определения глубины черпания дражного забоя | 1975 |
|
SU580278A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Мокрецов В П | |||
| Устройство контроля глубины черпания и величины послойного опускания черпаковой рамы | |||
| Свердловск, труды СГИ, вып.98, 1973, с 64-66 | |||
| Устройство для определения глубины черпания дражного забоя | 1977 |
|
SU646007A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
