Известны моделирующие устройства для определения статических характеристик синхронных машИН, содержащие аналоговую вычислительную мащину, усилители, блок нелинейностей и источники тока.
Предложенное устройство отличается тем, что для повыщения точности определения характерист1ик оно содерЖ1Ит модель магнитного поля .машины, соединенную с анализаторами потокосцепления обмоток статора по продольным и поперечным осям машины. Выходы анализаторов соединены со входами аналоговой вычислительной машины, один выход которой через усилитель и источник тока моделирования намагничиваюшей силы ротора связан с моделью магнитного поля, другой - через усилитель соединен со входом блока нелинейности, выходы которого подключены соответственно к источникам тока моделирования по продольной и поперечной осям обмотки статора, а выходы этих источников тока связаны с моделью магнитного доля.
Целью изобретения является создание техничесюи простого устройства, которым можно определять и исследовать все статические характеристики синхронных машил, .не делая грубых допущений относительно влияния насыщения магнитных систем машины на ее парам етры.
Моделирующее устройство для определения статических характеристик синхронных электрических машин позволяет получить любые статические характеристики синхронной маШИны в установившемся режиме при одновременном точном воспроизведении магнитного поля машины с учетом нелинейных характеристик намагничивания сердечников статора и ротора.
Моделирующее устройство имеет электрическую модель магнитного поля синхронной электрической машины, два анализирующих устройства, соединенных с аналоговой вычислительной машиной, управляющей с помощью нелинейного блока системами токов, вводимых в модель магнитного поля.
Модель магнитного поля воспроизводит поле в синхронной :мащ1и:не, причем ноле в магнитных сердечниках статора и ротора моделируется различными нелинейными двухполюсниками. Анализирующие устройства представляют собой масщтабные преобразователи со входными сопротивлениями, соединенными в звезду, причем сопротивления звезд выбраны по специальному принципу.
Нелинейный блок управления токами модели имеет специальный вращающий трансформатор, приводимый во вращение исполнительным двигателем постоянного тока. Измерение токов, вводимых в модель, проводится также
с помощью особого вращающегося трансформатора.
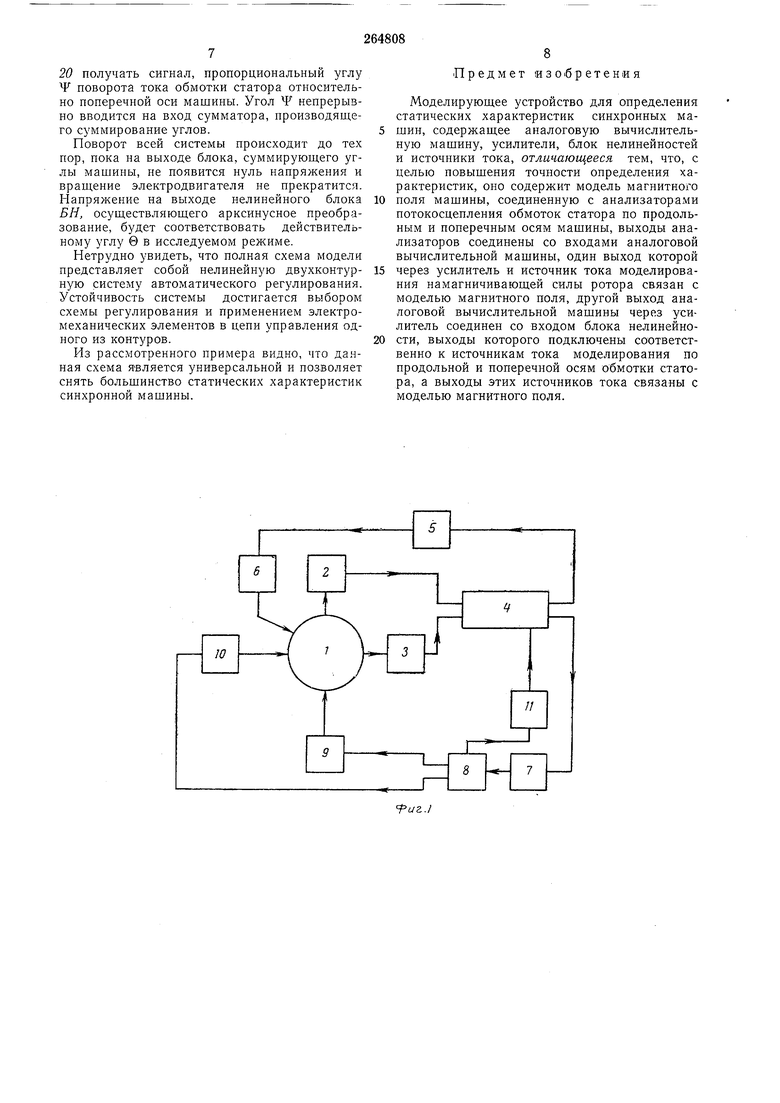
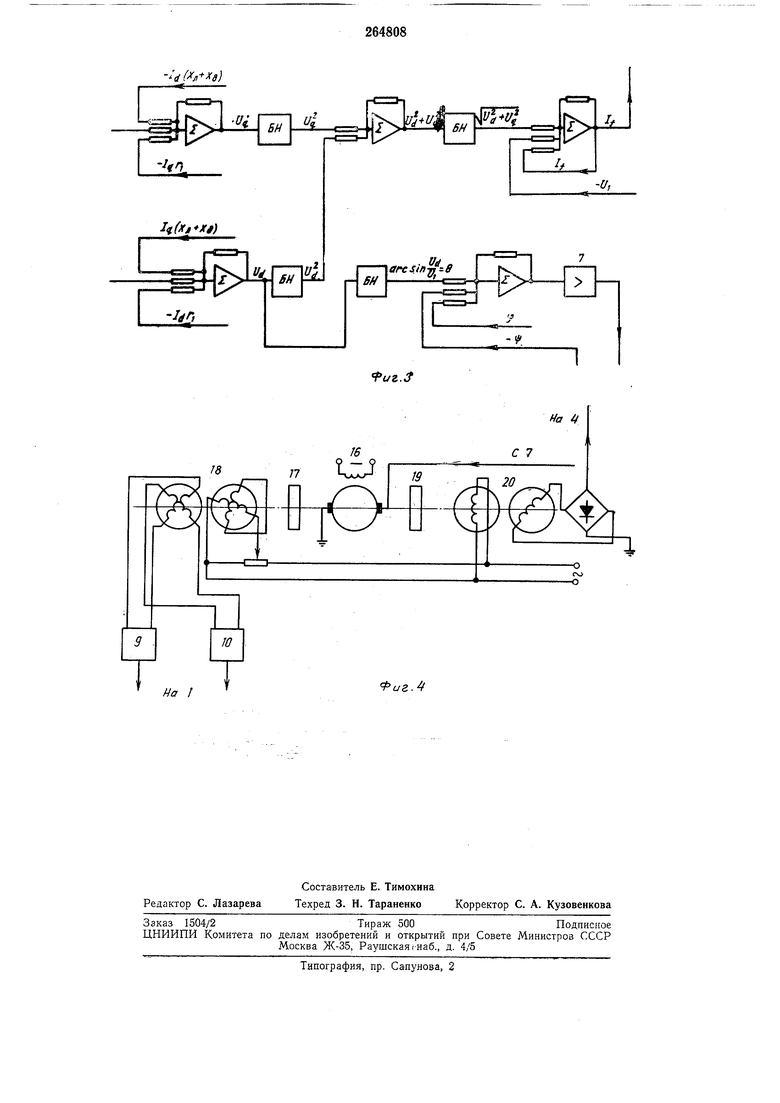
На фиг. 1 приведена блок-схема моделирующего устройства для определения статических характеристик синхронных машин; на фиг. 2 - при.нципиальная схема модели магнитного поля с нрисоединенными к ней анализаторами потокосцепления обмотки статора; на фиг. 3 - нрииципиальная схема соединения блоков аналоговой вычислительной маиины для определения внешней, регулировочной, угловой и нагрузочной характеристик синхронной машины; на фиг. 4 - схема управления источниками токов, моделирующих Намагничивающую силу обмотки статора в проекциях на продольную и поперечную оси машины, и устройство, контролирующее соотношение между этими проекциями.
Моделирующее устройство для определения статических характеристик асинхронных машин имеет электрическую модель 1 магнитного ноля исследуемой синхронной машины. К модели присоединены два анализатора 2 и 3 потокосценления обмотки статора по продольной и поперечной осям машины. Выходы анализаторов соединены с блоками аналоговой вычисл1ИТ| л ьнрй мащины 4. Аналоговая машина 4 чЬрез усилитель 5 связана с источником 6 тока, ввод1|дмь1М в модель / для моделирования намагничивающей силы обмотки ротора. Через усилитель 7 аналоговая машина также соединена с нелинейным управляющим блоком 8, который задает через источлики 9 10 токи, моделирующие намагничивающую силу о,бмотки статора в проекциях на продольную и поперечную оси машины. Устройство //, присоединенное к нелинейному блоку 8 и аналоговой вычислительной машине 4, изменяет токи, моделирующие токи источников 9 и 10 токов.
Модель / слулшт для воспроизведения магиитного поля синхронной мащины, используя аналогию мел(;ду электрическим и магнитным полями. Моделирование среды с нелинейными характеристиками вызывает необходимость использования сопротивлений с нелинейными зависимостями. Полностью пространство в машине не моделировалось из-за непригодности большинства нелинейных сопротивлений для такого моделирования. В настоящей модели применены нелинейные двухполюсники , и , набранные из полупроводниковых диодов, что обеспечивает высокую стабильность характеристик двухполюсников и позволяет выполнять модель с достаточной точностью и относительно невысокими напряжениями.
Обычно при исследовании статических характеристик неизвестными бывают не менее двух переменных, поэтому для достижения рещения удобно использовать вычислительные средства, в частности, аналоговые вычислительные мащияы (АВМ). Лри этом необходимо обеспечить непрерывный ввод в АВМ информации о состоянии магнитного поля мащины. Для анализа статических процессоЁ оказывается достаточно измерять первые гармоники потокосцепления обмотки статора по осям d 1Я q. В литературе не имеется описа НИИ способов непрерывного измерения какойлибо величины с одновременным разложением се на гармонические. Обычно для анализа функции, полученной в результате моделирования, ее вручную изчмеряют, представляют в
виде графиков и разлагают известными способами. Таким образом, всегда имеет место разрыв во времени между собственно моделированием и получением результатов в численном виде.
В описываемом устройстве для анализа потокосцепления обмотки статора по продольной и поперечной осям используют соответственно анализаторы 2 и 3, представляющие собой масштабные преобразователи, содерл ащие усилители 12-15 постоянного тока, ко входам которых общими точками подсоединены звезды сопротивлений, соединенные другами концами с моделью ,/. Точки подсоединения сопротивлений к модели выбраны с учетом сопротивления пазового рассеяния обмотки статора моделируемой машины.
Сопротивления звезд подобраны по следующим зависимостям. Заземленную точку модели считают за нулевую, а общее число точек
присоединения к модели обозначают 6q, где
q - число пазов на полюс и фазу в модели
может быть выбрано всегда целым.
Направление обхода контура модели магнитного поля выбирают, -например, .против часовой стрелки. Сопротивления, подсоединенные к любой t-ной точке, находят по формулам:.,.v а) для сопротивлений, подсоединенных к
усилителям .12 и 13
Р -Г 3g
с i -
sin -
зд
где С; -коэффициенты Котеса для численного интегрирования, в данном случае равные
-- для всех I,
не кратных трем, и
Т
всех I, кратных трем;
б) для сопрот1ивлений, присоединенных усилителям 14 и 15
D-C
RO
/ ,
sinя
V 3
где С1 -для всех i, не кратных трем, и
- для всех I, кратных трем.
В этом случае усиЛИтели 12-/5 будут выделять из потенциальной функции, имеющей место в модели, первые гармонические потокосцепления по продольной d и поперечной q осям маЩИны.
Выходы усилителей 12 и 15 соединены с блоками АВМ, которые учитывают надения напряжения на лобовом и дифференцнальном сопротивлениях обмотки статора.
iKaK видно из фиг. 3, АВМ находит напряжение и на зажимах обмотки статора в виде
yW+ul.
Выход нелииейного блока, извлекающего квадратный корень «з суммы квадратов напряжений и и/7, соединен с одним из входов сумматора, на два другие входа которого поданы потенциалы, пропорциональные заданному напряжению U и току If, моделирующему намагничивающую силу обмотки возбуждения ротора. Потенциал выхода этого сумматора через усилитель 5 напряжения задает ток источника 6 тока, и этот ток вводится в модель магнитного поля, воспроизводя намагничивающую силу обмотки возбуждения.
Выход блока, на котором имеет место напряжение и, связан с нелинейным блоком, осуществляющим следующую зависимость между входным и выходным напряжениями
f/gyx - arcsin t/Ex,
что позволяет на его выходе получить значение угла 9 между вектором напряжения обмотки статора и поперечной осью ротора. Выход арксинусного нелинейного блока соединен со входом сумматора, на который одновременно подаются потенциалы, пропорциональные углам ф и W мащины. Выход этого сумматора через усилитель 7 связая с нелинейным блоком 8 управления, два выхода которого управляют источниками 9 н 10 тока, моделирующими намагничивающую силу обмотки статора в проекциях на продольную и поперечную оси мащины.
В описываемом конкретном случае в качестве нелинейного управления использован вращающийся трансформатор, с обмотки ротора которого снимаются напряжения, пропорциональные синусу и косинусу угла поворота ротора этого трансформатора. Здесь выход усилителя 7 мощности соединяется с якорной обмоткой маломощного исполнительного двигателя 16 постоянного тока. Двигатель 16 через редуктор 17 связан с синус-косинусным вращающимся трансформатором 18, а также через редуктор 19 с вращающимся трансформатором 20, имеющим линейную характеристику напряжения обмотки ротора в зависимости от угла поворота. Выход трансформатора 20 через выпрямительный мост соединен с блоком АВМ, производящим суммирование углов.
Регулирование токов модели по двум каналам, причем так чтобы ток возбуждения изменялся при отклонении напряжения обмотки статора от номинального, а соотнощение между проекциями тока статора - при отклонении получаемых углов машияы от действительных, позволяет получить систему автоматического регулирования с хорощеи сходимостью процесса регулирования.
Применение двух вращающихся трансформаторов, механически жестко связанных между собой, позволяет наиболее просто рещить задачу управления гальванически несвязанными источниками тока при одновременном контролировании углов между вектором тока и осями ротора машины. Вращающие трансформаторы являются надежными электромеханическими элементами высокой степени точности, у них отсутствует дрейф, они не подвержены старению, влиянию внещних полей и не требуют дополнительной специальной настройки.
Снятие на описанной модели, например, регулировочных характеристик машины осуществляется следующим образом. На соответствующих сумматорах выставляются напряжения, пропорциональные напряжению обмотки статора и созф нагрузки. Сонротивлением в первичной обмотке синускосинусного вращающегося трансформатора 18 устанавливается напряжение, соответствующее току обмотки статора. Предпололсим, что в начальный момент источники 6, 9 и 10 тока вводят в модель совокупность токов /у, / и /. На выходах усилителей 12 я 15 появятся потенциалы и W л. кокоторые после всех операций на АВ.Ч дадут на выходе конечного сумматора, сравнивающего напряжение обмотки статора с номинальным, потенциал, не равный потенциалу, соответствующему введенному току If. Через
усилитель 5 будет введено необходимое исправление в ток источника 6, так чтобы в итоге потенциал конечного сумматора стаб.. лизировался и оказался пропорциональным искомому току If. Одновременно с этим по
второму каналу регулирования при наличии возмущения любого знака па входе усилителя 7 приходит во вращение электродвигатель 16 и поворачивает в необходимом направлении оба вращающихся трансформатора 18 и 20.
Нри повороте синус-косинусного трансформатора 18 изменяется соотнощение между напряжениями его выходов при неизменном напряжении первичной обмотки. Следовательно, будет изменяться соотпощение между токами /и и 1д источников 9 VI 10 токов, моделирующих намагничивающую силу обмотки статора в проекциях на оси машины при неизмеииой полной намагничивающей силе.
Линейный трансформатор 20, жестко связанный с синус-косинусным трансформатором 18, во время вращения исполнительного электродвигателя 16 поворачивается, при
этом происходит изменение напряжения на его выходе, тем самым происходит контроль угла, на который повернулся трансформатор 18.
20 получать сигнал, пропорциональный углу Ч поворота тока обмотки статора относительно поперечной оси машины. Угол Y непрерывно вводится на вход сумматора, производящего суммирование углов.
Поворот всей системы происходит до тех пор, пока на выходе блока, суммирующего углы машины, не появится нуль напряжения и вращение электродвигателя не прекратится. Напряжение на выходе нелинейного блока БН, осуществляющего арксинусное преобразование, будет соответствовать действительному углу в в исследуемом режиме.
Нетрудно увидеть, что полная схема модели представляет собой нелинейную двухконтурную систему автоматического регулирования. Устойчивость системы достигается выбором схемы регулирования и применением электромеханических элементов в цепи управления одного из контуров.
Из рассмотренного примера видно, что данная схема является универсальной и позволяет снять большинство статических характеристик синхронной машины.
Предмет изо бретения
Моделирующее устройство для определения статических характеристик синхронных машин, содержащее аналоговую вычислительную машину, усилители, блок иелинейностей и источники тока, отличающееся тем, что, с целью повышения точности определения характеристик, оно содержит модель магнитного
поля машины, соединенную с анализаторами потокосцепления обмоток статора по продольным и поперечным осям машины, выходы анализаторов соединены со входами аналоговой вычислительной машины, один выход которой
через усилитель и источник тока моделирования намагничивающей силы ротора связан с моделью магнитного поля, другой выход аналоговой вычислительной машины через усилитель соединен со входом блока нелинейности, выходы которого подключены соответственно к источникам тока моделирования по продольной и поперечной осям обмотки статора, а выходы этих источников тока связаны с моделью магнитного поля.

-Iti(Xj,
fuz.J
иг.
