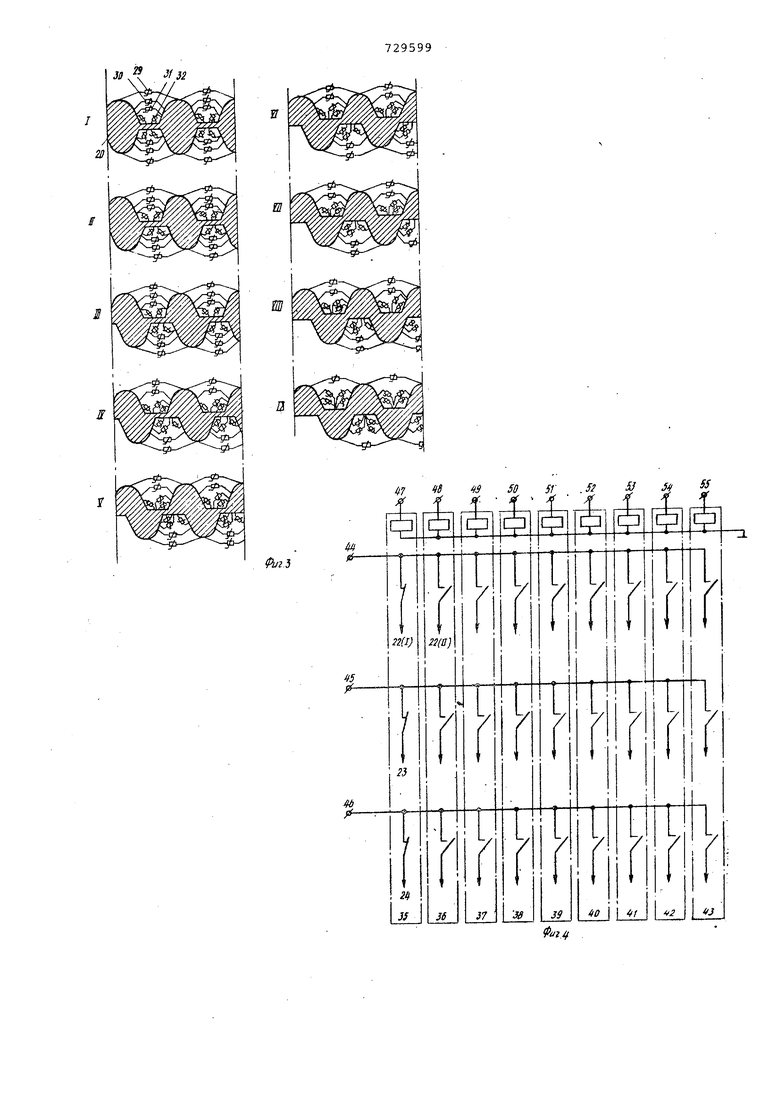
(54) УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ЭЛЕКТРОМАГНИТНЫХ ПРОЦЕССОВ В ИНДУКТОРНЫХ МАШИНАХ Изобретение относится к электрической вычислительной технике, в част ности к моделированию электрических систем или устройств. Известно устройство для определения статических и динамических харак теристик синхронных машин, содержащее аналоговый вычислительный блок и модель магнитного поля машины 1. Однако воспроизведение процессов в продольно-поперечном представлении исключает возможность исследЬвания эффектов, связанных с взаимным перем щением сердечников статора и ротора с учетом их реальной геометрии. Наиболее близким по технической сущности к изобретению является устройство, содержащее две группы транс форматоров, вычислительный блок и мо дель магнитного поля машины 2. Целью изобретения является повышение точности моделирования. Это достигается тем, что в устрой ство введены модуляторы, демодуляторы, коммутатор, дополнительные модел магнитного поля машины и блок управл ния,выходы которого подключены соответственно к первым входам демодулят ров , коммутатора и модуляторов,вторые входы которых соединены с выходами вычислительного блока,входы которого подключены соответственно к первым выходам модуляторов, вторые выходы и третьи входы которых соединены соответственно с первьЕми входами и выходами первой и второй групп трансформаторов, вторые входы и выходы которых подключены соответственно к первым выходам и вторым входам демодуляторов, вторые выходы и третьи входы которых соединены соответственно,с вторыми входами и с выходами коммутатора, группы входов и вь1ходов которого подключены к входам и выходам моделей магнитного поля машины, кроме того, модель магнитного поля машины состоит из электропроводной бумаги, соединенной через резисторы с входом модели, граничные области электропроводной бумаги через нелинейные элементы соединены с выходом модели магнитного поля машины.. На фиг. 1 приведена блок-схема устройства на фиг. 2 - модель магнитного папя машины для индукторного генератора для одного вз.аимного положения зубцов статора и ротора; на |)иг. 3 показано расположение нелиней9ЫХ элементов в зубцовой зоне при девяти различных положениях зубцов статора и ротора; на фиг, 4 приведена принципиальная схема соединения группы реле коммутатора; на фиг. 5 - прин ципиальные схемы.решения дифференциальных уравнений электрического равновесия индукторного генератора; на фиг, 6 - блок управлений группой реле Устройство содержит вычислительный блок 1 (см. фиг. 1), соединенный через модуляторы 2 и 3 с трансформатора ми 4 и 5, которые через демодуляторы б и 7 подключены к коглмутатору 8, выполненному на реле, соединенному с мо делями 9-17 магнитного поля машины, образующими блок 18 воспроизведения магнитного поля машины, и с блоком 19 управления, подключенным также к моду ляторам 2, 3 и демодуляторам б, 7. Устройство включает блок 18 воспроизведения магнитного поля, состоящий из моделей 9-17 поля, с помощью которых имитируется дискретное вращение ротора. Причем количество моделей поля определяется числом различных положений, занимаемых вращающимся дис кретно ротором относительно статора (на фиг. 1 число указанных положений принято равным 9). Модель магнитного поля для одного взаимного положения зубцов статора и ротора (см. фиг. 2). включает электро проводную бумагу 20, воспроизводящую в плоско-параллельном представлении магнитное поле в воздухе активной зоны машины,- ограниченной плоскостями симметрии QQ и ВВ . Области электропроводной бумаги, соответствующие пазам обмоток статора и возбуждения, соединены с резисторными делителями тока, каждый из которых включает четыре идентичных резистора 21, одни выводы которых соединены вместе и подключены к входной клемме (22, 23, 24), а другие - к электропроводящей бумаге.Границы электропроводящей бумаги, соответствующие пазам обмотки возбуждения, через нелинейные элементы 25, воспроизводящие магнитное поле в спинке ста тора над пазом возбуждения, соединены с шиной 26 нулевого потенциала. Нелинейныеэлементы 27 и 28, соединяющие в модели пазы якоря и возбуждения, мо делируют соответственно магнитное поле в больших зубцах статора и в спинке статора над пазом якоря, а нелиней ные элементы 29-32, соединенные с ма. лыми пазами, - поле в малых зубцахстатора. Причем, вследствие того, что поле вдоль оси симметрии ВВ чисто радиальное, модель магнитного поля вдол указанной оси закорочена и соединена с шиной нулевого потенциала. Шина нулевого потенциала располож на вдоль внешнего контура листа стат ра, поэтому магнитным полем за его пределами можно пренебречь. Нелинейный элемент модели магнитно-i о поля представляет собой параллельое соединение двух электрических цеей (каждая из этих цепей выполнена з последовательно соединенных резисора 33 и двух встречно-включенных идентичных стабилитронов 34), апроксимирующих кусочнолинейно двумя прямыми кривую намагничивания моделируемого нелинейного сопротивления ферромагнитного участка магнитопровода. На фиг. 3 гриведены схемы соединений нелинейных элементов, моделирующих магнитное поле в зубцах статора и ротора при их различных относительных положениях. Реле 35-43 (см. фиг. 4) образуют коммутатор 8. Каждое из этих реле включает три замыкающих контакта, одни выводы которых подключены к клеммам 44-46, а другие - к входным клеммам делителей тока (контакты реле 35 соединены с входными клеммами 22-24 делителя тока модели 9, принципиальная схема которой показана на фиг. 2), клеммы 47-55 - клеммы обмоток реле 35-43. Вычислительный блок 1 (см. фиг, 5) включает интеграторы 56-58, сумматоры 59 и 60, инверторы 61 и 62, измерительные резисторы 63 и 64, потенциометры 65-73. Выходы сумматора 59 и резистора 63 соединены с входом модулятора 2, а выходы сумматора 60 и резистора 64 - с входом модулятора 3. Один из входов сумматора 59 соединен с 1зыходом интегратора 56, а другой - с потенциометром 67, подключенным к выходу инвертора 61. Выход инвертора 61 соединен также через потенциометр 69 с одним из входов интегратора 57. Выход интегратора 57 соединен через потенциометр 68 с другим его входом, а также через потенциометр 65 с входом интегратора 56. Другой вход интегратора 56 через потенциометр 66 соединен с входом инвертора 61 и измерительным резистором 63. Вход сумматора 60 соединен с выходом интегратора 58, а также через потенциометр 73 подключен к выходу инвертора 62, вход которого соединен с измерительным резистором 64. Один из входов интегратора 58 через потенциометры 70 и 71 соединен с источником опорного напряжения 100 В, а другой - через потенциометр 72 - с выходом инвертора 62. Первичные обмотки трансформаторов 4 и 5 подключены к выходу модуляторов 2 и 3, а вторичАае обмотки - к входу демодуляторов 6 и 7. Модуляторы и демодуляторы имеют идентичную схему, представляющую собой электрический мост, в плечи которого вкл рчены обратимые ключи. Причем ключи в противолежащих плечах моста управляются синхронно и синфазно, а в смежных плечах - синхронно, но в противофазе. Благодаря использованию модулятора и демодулятора возможна трансформация постоянных соста.вляющйх питающих модель магнитного поля токов, соответ ствующих токам обмоток моделируемой машины. Блок управления (см, фиг. 6) служит для преобразования напряжения Ua) пропорционального угловой скорости вращения ротора, в последовательность команд управления группой реле. Укаванное преобразование реализуется с помощью девятиразрядного реверсивного резистора сдвига, выполненного на RST-триггерах 74-а2 с синхронизированнЕЛй счетным входом и асинхронными S и R-входами, RS-триггере 83 с прямым входом, схемах И-ИЛИ 84-92, клем ме 93, усилителях-инверторах 94-100, управляемого генератора 101 импульсов, вход которого соединен с источником напряжения Uco, пропорционального угловой скорости вращения ротора, а выход - с входами синхронизации (С-входами) триггеров 74-82. Клемма 93 начальной установки соединена с S-входом триггера 74 и R-входами триг геров 75-82. Нулевые выходы триггеров 74-82 через усилители-инверторы 94-102 подключены соответственно к клеммам 47- 54 обмоток реле. Генератор 103 прямоугольных импульсов, выход которого соединен непосредственно с управляющи ми входами ключей 104 (см. фиг. 5) и через усилитель-инвертор 105 - с управлягадими входами ключей 1 Об, модуляторов 2, 3 и демодуляторов 6 и 7. Рассмотрим принцип работы предлаг емого моделируемого устройства. В исходном состоянии на клемму 93 блока управления (см. фиг. 6) поступает сиг нал начальной установки, который при водит триггер 74 в состояние , триггеры 75-82 в состояние О. При этом сигнал с единичного входа триггера 74 устанавливает триггер 83 в состояние О , в результате чего на соответствующие входы схем И-ИЛИ поступает единичный сигнал, создаклций условия сдвига 1 триггеров в сторону старших разрядов. На клемме 47 появляется напряжение, приводящее к срабатыванию реле 35. Затем сигнал начальной установки выключается и на вход генератора 101 подается напряжение U(ji, пропорциональное угловой скорости вращения ротора, которое приводит к генерации импульсов с частото пропорциональной входному напряжению Uuj. Одновременно включается генератор 103, управляющий ключами модуляторов 2, 3 и демодуляторов 6, 7, и аналоговый вычислительный блок 1. при этом осуществляется сдвиг i в регистре сдвига в сторону старших разрядов и, как следствие последовательное срабатывание реле 48-55; При достижении Ч триггера 82, триггер 83 переходит в состояние, вследствие чего формируется команда регистра сдвига. Последующие импульсы генератора 101 приведут к сдвигу единицы в сторону младших разрядов до достижения реверсивного счетчика исходного состояния и срабатыванию реле 55-47 в обратном порядке. В результате описанной работы блока 19 управления через реле осуществляется последовательное подключение в прямом и обратном порядке моделей магнитного поля машины 9-17 к аналЪговому вычислительному блоку. Тем самым осуществляется ввод необходимой информации о магнитном поле машины для решения системы дифференциальных уравнений, описывающих процессы в электрических контурах машины с учетом взаимного перемещения статора и ротора. Аналоговый вычислительный блок решает следующую систему дифференциальных уравнений электрического равновесия мамины при активноемкостной нагрузке(ifl-) ) . где % f ,Jя ,Ug ,1д Де rj - потокосцепления, напряжения, токи и активные сопротивления соответственно обмоток якоря и возбуждения; CM н емкость и активное сопротивление нагрузки. При этом напряжения модели,соответствующие д , Ч , Цд , Ug, Лд , JQ, измеряются соответственно на выходах интеграторов в 56-58, потенциометре 70, резисторах 63 и 64. Сумматоры 59 и 60 введены для возможности компенсации падения напряжения на резисторных делителях токов. Описываемое устройство, благодаря введению новых элементов и связей, отличается более высокой точностью моделирования электромагнитных процессов в индукторных .машинах. Формула изобретения 1. Устройство для моделирования электромагнитных процессов в индукторных машинах, содержащее две группы трансформаторов, вычислительный блок и модель магнитного поля машины, о тличающееся тем, что, с целью повышения точности, в него введены модуляторы, демодуляторы, коммутатор, дополнительные модели магнитного поля машины и блок управления, выходы которого подключены соответственно к первым входам демодуляторов, коммутатора и модуляторов, вторые входы которых соединены с выходами вычислительного блока, входы которого подключены соответственно к первым выходам модуляторов, вторые выходы и третьи выходы которых соединены соответственно с первыми входами и выходами первой и второй групп трансформаторов вторые входы и выходы которых подключены соответственно к первым выходам и вторым входам демодуляторов, вторые выходы и третьи выходы которых соединены соответственно с вторыми входа ми и с выходами коммутатора, группы входов и выходов которого подключены к входам и выходам моделей магнитного поля машины. 2. Устройство по п. 1, отличающееся тем, что модель магнитного поля машины состоит из электропроводной бумаги, соединенной через резисторы с входом модели, граничные области электропроводной бумаги соединены нелинейными элементами с выходом модели магнитного-поля машины. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 438996, кл; G 06 G 7/62, 1971. 2.Авторское свидетельство СССР № 481914, кл.. G 06 G 7/62, 1973 (прототип) .



| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования электромагнитных процессов в асинхронных машинах | 1989 |
|
SU1681315A1 |
| Устройство для моделирования электромагнитных полей и процессов в асинхронных машинах | 1989 |
|
SU1683041A1 |
| Моделирующее устройство для исследования электромагнитных процессов синхронных машин | 1973 |
|
SU481914A1 |
| Устройство для моделирования электромагнитных процессов в асинхронных машинах | 1988 |
|
SU1594569A1 |
| Моделирующее устройство для определения статических и динамических характеристик синхронных машин | 1971 |
|
SU438996A1 |
| Устройство для моделирования магнитных полей в синхронных машинах | 1986 |
|
SU1455348A1 |
| Моделирующее устройство для определения статических и динамических характеристик асинхронных машин | 1975 |
|
SU560241A1 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 2006 |
|
RU2325620C2 |
| Устройство для моделирования электрических машин | 1988 |
|
SU1597886A1 |
| Устройство для моделирования синхронной машины | 1982 |
|
SU1125633A1 |

7
и
«7 tS its 50 51 5 5J 5 SS
4S
i
r
I
2t(I)
2S(a
I
L.
r
I
т
I
1
ID 1
3S
36
37
33
«J
2
Iffl
21
22
