Изобретение относится к вьхчисли- тельной технике, в частности к моделированию электрических систем и устройств .
Цель изобретения - повышение точности моделирования.
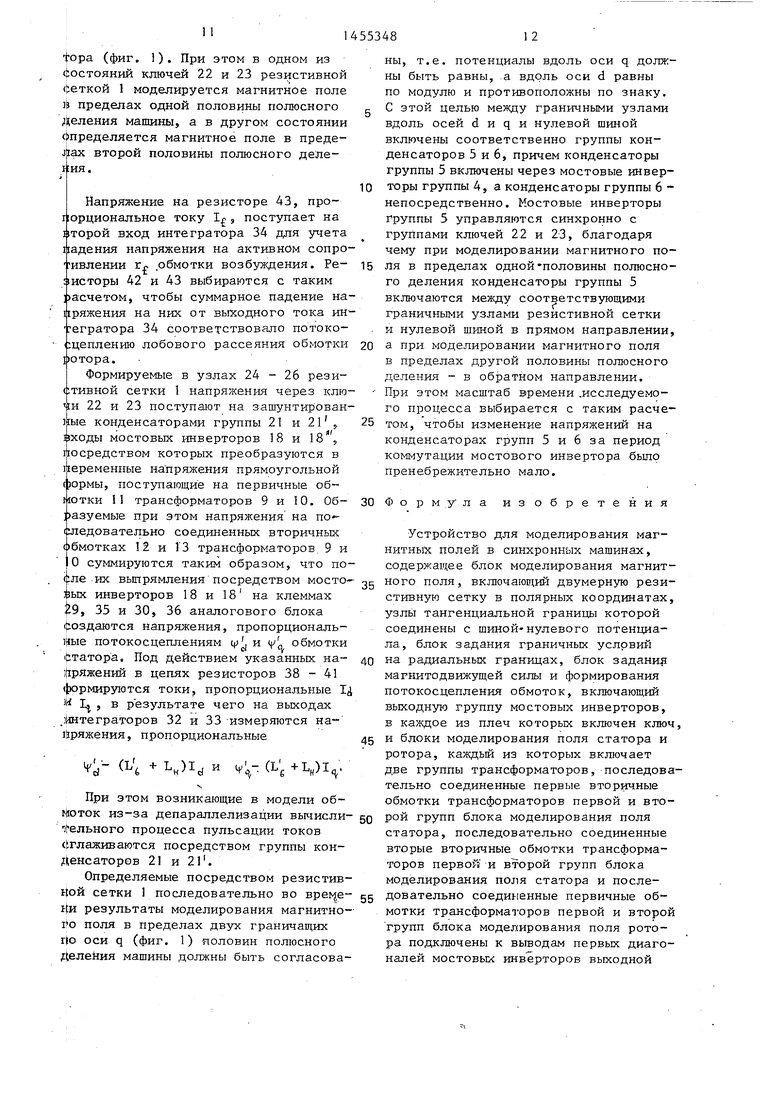
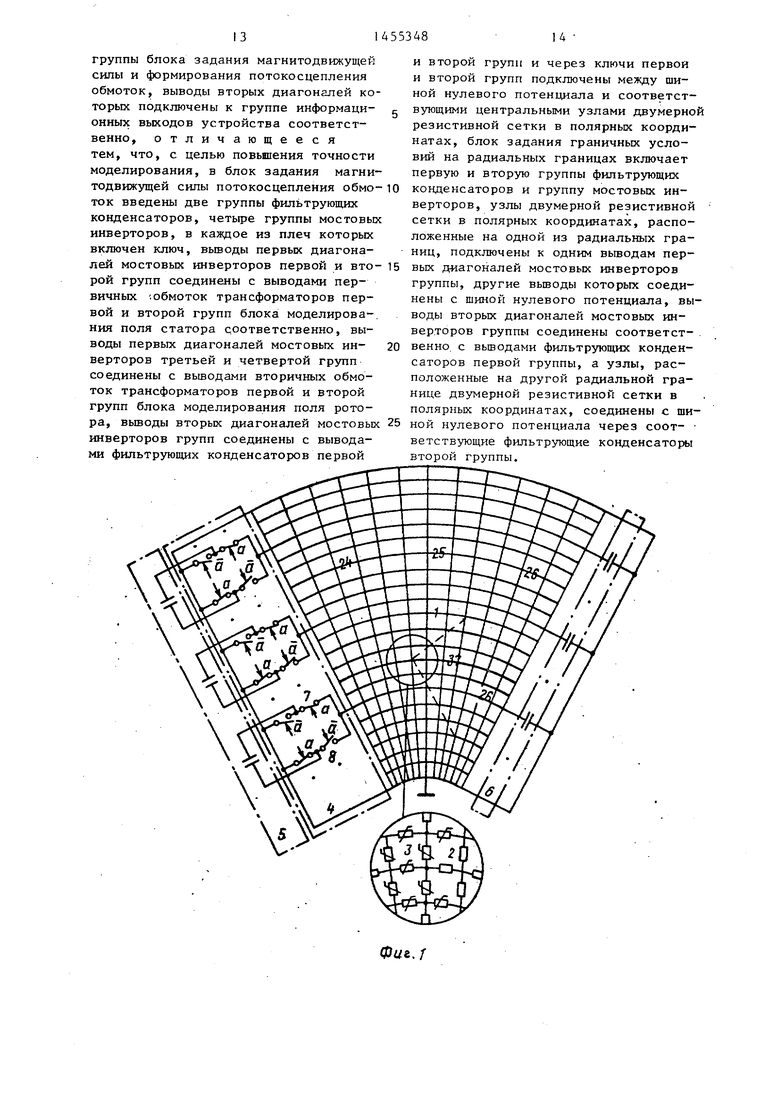
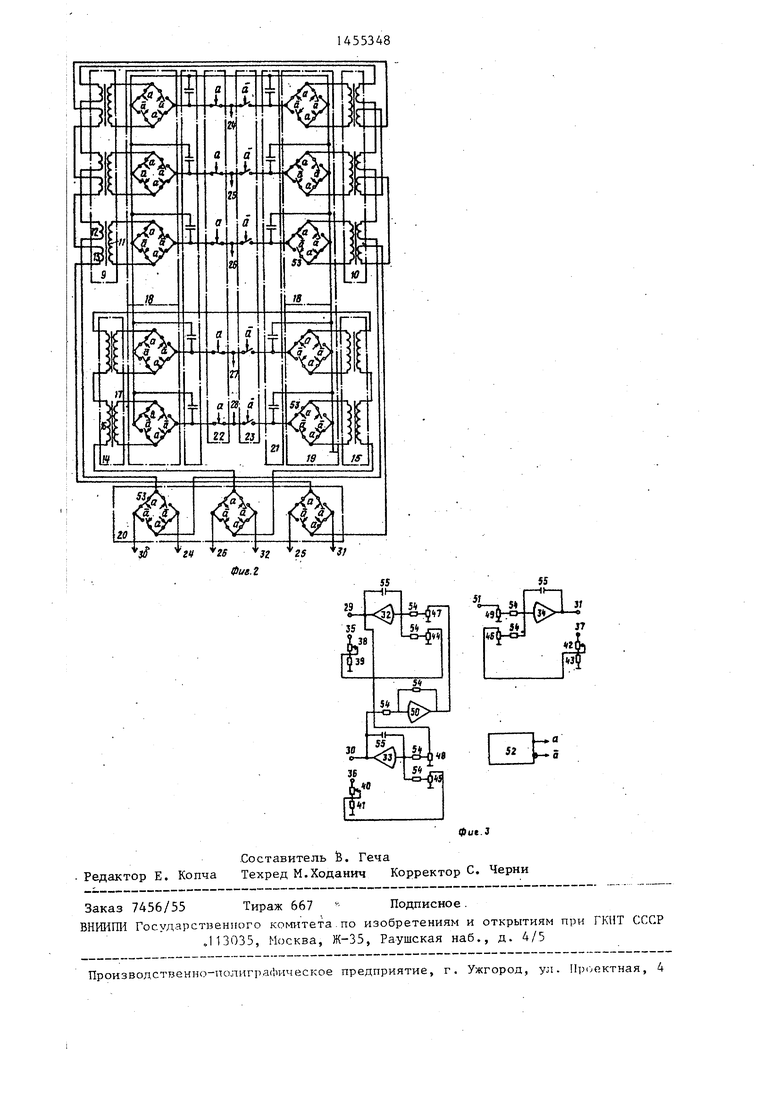
На фиг. 1 приведена схема блока моделирования магнитного поля; на фиг. 2 - принципиальная схема блока задания магнитодвижупщх сип и формирования потокосцеплений обмоток и блоков моделирования поля статора и ротора; на фиг. 3 - аналоговый блок, решающий уравнения электрического равновесия машины.
Устройство содержит блок моделирования магнитного поля, включающий двумерную резистивную в полярных координатах сетку 1 i со.стояп1ую из линейных 2 и нелинейных 3 резисторов, моделирующих соответственно воздушные и ферромагнитные участки магнитной цепи в инвервале половины полюсного деления машины (фиг. I), причем граничные узлы, расположенные на тангенциальных границах, соединены с нулевой шиной. Граничные узлы на одной из радиальных границ сетки 1 через группу мостовых инверторов 4 и первую группу фильтрующих конденсаторов 5, а узлы, расположенные на другой радиальной границе, через вторую гр уппу фильтрующих конденсаторов 6 соединяются с нулевой шиной. В плечи мостовых инверторов включены обратимые ключи 7 и 8, причем группа
4; ел
СП
со
00
3
мостовых инверторов и группы конден-- еаторов 5 и 6 составляют блок зада- йия граничных условий на радиальных Границах.
Магнитное поле машины, созданное Первой гармонической магнитодвижущей Силой (МДС) обмотки статора и МДС об- мсэтки ротора, моделируется блоками 1|1оделирования поля статора и ротора. :3лок моделирования поля статора включает первую 9 и вторую 10 группы трансформаторов -с первичными 1 1 и лервой 12 и второй 13 вторичными об- нотками. . с
При этом числа витков последова- ельно соединенных обмоток 12 распределены по синусоидальному закону, а последовательно соединенных обмоток
553484
18 и 19 соединяются с первичными обмотками 1 1 группы трансформаторов 9 и с вторичными обмотками 1 7 группы трансформаторов 14, а одни из диагоналей группы мостовых инверторов 18 и 19 - с первичными обмотками группы трансформаторов 10 и вторичными обмотками группы трансформаторов 15. Зашунтиро- ванные двумя группами фильтрующих конденсаторов 21 и 21 блока задания магнитодвижущей силы и формирования потокосцепления обмоток другие диагонали групп мостовых инверторов 18,
10
19 и 1
19
(фиг.- 2) соответственно через группы ключей 22 и 23 блока задания магнитодвижущей силы и формирования потокосцепления обмоток включаются между нулевой шиной и централь


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования электромагнитных полей и процессов в асинхронных машинах | 1989 |
|
SU1683041A1 |
| Устройство для моделирования электромагнитных процессов в асинхронных машинах | 1989 |
|
SU1681315A1 |
| Устройство для моделирования синхронной машины | 1982 |
|
SU1125633A1 |
| Моделирующее устройство для определения статических и динамических характеристик синхронных машин | 1971 |
|
SU438996A1 |
| Моделирующее устройство для исследования электромагнитных процессов синхронных машин | 1973 |
|
SU481914A1 |
| Устройство для моделирования электромагнитных процессов в асинхронных машинах | 1988 |
|
SU1594569A1 |
| Устройство для моделирования установившихся и переходных процессов в трансформаторах | 1977 |
|
SU662947A1 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ ВРАЩЕНИЯ ТРЕХФАЗНОЙ МАШИНЫ | 2013 |
|
RU2557071C2 |
| Вентильный электропривод | 1983 |
|
SU1234940A1 |
| Устройство для моделирования электромагнитных процессов в индукторных машинах | 1977 |
|
SU729599A1 |
Изобретение относится к области вычислительной техники, в частности к моделированию электрических систем и устройств. Цель изобретения - повышение точности моделирования. Для этого в устройство, содержащее блок моделирования магнитного поля, включающий двумерную резистивную сетку в . полярных координатах, блок задания граничных условий на радиальных границах, блок задания магнитодвижущей силы и формирования потокосцепления обмоток, включающий выходную группу мостовых инверторов и блоки моделирования поля статора и ротора, каждый из которых включает две группы трансформаторов, дополнительно введены в блок задания магнитодвижущей силы и потокосцепления обмоток группы мостовых инверторов, группы фильтрующих конденсаторов, группы ключей. 3 ил. S (Л
3-по конусоидальному закону (фиг. 2). 20 ными узлами 24 - 28 резистивной сет- :5лагодаря такому выполнению трансформаторов 9 и 10 токи в цепях обмоток 12 и 13 соответствуют продольному и роперечному токам, а суммарные напряки 1 (фиг. 1).
Последовательно соединенные обмотки 12 и 13 грутЛ трансформаторов 9 и 10, первичные обмотки 16 групп тран- 25 сформаторов 14 и 15 подключаются к одним из диагоналей групп мостовых инверторов 20 (фиг. 2). Другие диагонали этих мостовых инверторов включены между выходными клеммами 29-31 (фиг. 3) интеграторов 32 - 34 и клеммами 35 - 37 аналогового блока, причем указанные клеммы через последовательно соединенные резисторы 38 и 39, 40 и 41, 42 и 43 соединены с нулевой
Последовательно соединенные обмотки 12 и 13 грутЛ трансформаторов 9 и 10, первичные обмотки 16 групп тран- 25 сформаторов 14 и 15 подключаются к одним из диагоналей групп мостовых инверторов 20 (фиг. 2). Другие диагонали этих мостовых инверторов включены между выходными клеммами 29-31 (фиг. 3) интеграторов 32 - 34 и клеммами 35 - 37 аналогового блока, причем указанные клеммы через последовательно соединенные резисторы 38 и 39, 40 и 41, 42 и 43 соединены с нулевой
30
(ения этих обмоток - продольному и юперечному потокосцеплениям обмотки |;татора моделируемой машины. Обмот- а ротора представлена в виде четы- эех катушек с одинаковыми числами витков, моделируемых посредством двух групп трансформаторов 14 и 15 :: идентичными первичными 16 и вторичными 17 обмотками, причем все пер- зичные обмотки 16 трансформаторов 14 л 15 соединены последовательно. Труп- 5 . Резисторы 39, 41 и 43 соответ- пы трансформаторов 14 и 15 составляют ственно через потенциометры 44 - 46
блок моделирования поля ротора. Для исключения ограничения воспроизводимых процессов в области низких частот связь указанных групп трансформато ров с резистив ной сеткой 1 и аналоговым блоком (фиг. 3) осуществляется через первую, вторую, третью, четвертую группы мостовых инверторов 18, 18, 19 и 19 и выходную группу мое- товых инверторов 20 блока задания магнитодвижущей силы и формирования потокосцепления обмоток. При этом посредством мостовых инверторов, соединенных с первичными обмотками тран- сформаторов, осуществляется преобразование постоянного напряжения в переменное напряжение прямоугольной формы, ас помощью мостовых инверторов, подключенных к вторичным обмоткам, осуществляется обратное преобразование трансформированного напряжения в постоянное напряжение. Одни из диагоналей группы мостовых инверторов
ными узлами 24 - 28 резистивной сет-
ки 1 (фиг. 1).
Последовательно соединенные обмотки 12 и 13 грутЛ трансформаторов 9 и 10, первичные обмотки 16 групп тран- сформаторов 14 и 15 подключаются к одним из диагоналей групп мостовых инверторов 20 (фиг. 2). Другие диагонали этих мостовых инверторов включены между выходными клеммами 29-31 (фиг. 3) интеграторов 32 - 34 и клеммами 35 - 37 аналогового блока, причем указанные клеммы через последовательно соединенные резисторы 38 и 39, 40 и 41, 42 и 43 соединены с нулевой
. Резисторы 39, 41 и 43 соответ- ственно через потенциометры 44 - 46
0 5 Q
5
соединены с одним из входов интеграторов 32 - 34. Другие входы указанных интеграторов через потенциометры 47 - 49 соединены с выходами масштабного усилителя 50, интегратора 32 и с клеммой 51. К прямому и инверсному выходу генератора 52 прямоугольных импульсов подключаются управляющие входы ключей 53 всех мост овых инверторов и групп ключей 22 и 23. Аналоговый блок (фиг. 3) содержит также резисторы 54 и емкости 55.
В отличие от известнот о подхода к расчету магнитного поля методом слабой аппроксимации в предлагаемом устройстве исходное уравнение магнитного поля не расщепляется на одномерные уравнения, а представляется в виде совокупности уравнений локальных участков расчетной области поля с максимально близкими геометрическими и электромагнитными характеристиками, входящих в эти Участки фер.ромагнитных и электропроводяошх сред. Для этого расчетная область О плоско- параллельного магнитного поля исследуемой машины делится на ряд подобластей 0 (i 1, 2, 3,...,N) с контактными поверхностями С- между подобластями и Q- , так что
Q го., г,. i:.. ур,.
..,V
При заданных токах обмоток магнитное поле в каждой из указанных подобластей может быть описано в полярных координатах г, 6 уравнением Пуассона для векторного магнитного потенциала в виде
1 3 f . дА; 1 d 0; ЗА,-, „
7
При этом на контактных поверхностях ( рассматриваемых подобластей потенциалы и тангенциальные со- ставляюпше.напряженности магнитного поля должны быть непрерьшны, т.е.
- А J „ - А j , .,, ;
- .-..
JA), ап;,,.„
О
гдеАр, А.„, ||,, л,„- векторные магнитные потенциалы . -и удельные магнитные сопротивления 1 -и и подобластей;
-нормаль к поверхности у ,-г ((, ;
-векторные магнитные потенциалы контактных по верхн остей.
С целью уменьшения аппаратурных затрат, требуемых для определения магнитного поля в области Q, условие (4) согласно методу слабой аппроксимации следует заменить равенством
П;,,„
А.,„
dAj,
ап;,.„
aAi
an;,;,.
о(
3Ai-4
at
где o( - постоянный коэффициент; t - время.
Из уря.внения. (5) следует, что
)«
1 I
7 S о
А,- . п,,,.„
. .А;.
аП;,.
dt .
(6)
10
15
Согласно (6) при Т - с A;i;. стремится к установившемуся значению
при которо;. .,,,,,|Ail 0.
Следввательно, равенство (5) сходит А;чся к (4) . Член о/
dt
в правой час
20
25
30
35
40
45
ти равенства (5) для рассматриваемой задачи имеет формальньш смысл, однако позволяет решение стационарных уравнений (2) для подобластей Q- в некотором интервале времени t 0,T;J производить со сдвигом времени, рав- - ным D/N, где N - число подобластей, на которые разделена расчетная область Q. Это, в свою очередь, дает возможность определить поле во всей области, пользуясь оборудованием, для сеточного моделирования магнитного поля только одной подобласти Q. Такой подход позволяет в N раз сократить необходимые для реализации сеточной модели исследуемого поля аппаратурные затраты.
Принятый подход к расчету магнитного поля в области Q позволяет в предлагаемой модели-для подобластей Q; уравнение (2) .и условие (4) на контактной поверхности представить следующим образом:
(i, t).:r||-.
-(ььм;
50
55
Vo. .- w
где функция f(i, t) определяется следующим образом:
/
f(ti, t)N при i + n)C t i+n) C;
i(i, t)0 при + п) г. ti(l +
и nf t + n)J,
ifAe n 1, 2, 3, 4,...
Очевидно, что функция f(1, t) c ;|1ится к 1 слабо, т.е.
а t.
JtfCi, s) - ,
H:
D - 0, t,, t - любые/ TO время как найденная из (8)
А1 t I N 5Al
А,-,,.„ у Uf(i,t)v,. .3
9)
|при ( 0 сходится к (6) сильно. i Таким образом, при заданном распределении плотностей токов cf; уравнение (7) и условия (3) и (8) позволяют определить распределение векторных магнитных потенциалов в расчет- |ной области О, следовательно, и пото- 1косцепления обмоток машины.
KiPR a.
(A; - ,
p,ri
If,
(10)
где yj , Pj, a, WR соответственно ло- токосцепление, число катушек, число параллельных ветвей, число витков
R-й обмотки: . в .R
1п -16 Разность векторных магнитных потенциалов активных сторон (i-и катушки R-й обмотки.
Принятая форма представления уравнения магнитного поля (7) и (8) приводит к необходимости дискретного задания токов обмоток для расчета магнитного поля машины, т.е., если ток, принадлежаший катушке и Я- й обмотке, вводится в i-ю подоб
8
ласть рассчитьюаемого магнитного по- ля, то его следует представить в виде ip,pf(i, t). Дискретное задание
токов приводит в модели магнитного поля к дискретному представлению векторных магнитных потенциалов. Для возможности формирования непрерывных значений векторных магнитных потенциалов, используемых в выражении
(10) для определения потокосцепления обмотки, а также дискретного задания токов, векторные магнитные потенциаК R , в функции от тока 1
и МДС Р| -и катушки следует в модели обмотки представить в следующем виде
tJA
IS
0
dt
-i ffi t- - НИ. PR TJ о
PR a
- -f fn M
0 .- - p«a
(П)
где в спучае. j i активные стороны рассматриваемой катушки расположены в одной подобласти; при j 9 i - в разных подобластях .Согласно (П)
1(1
S ipRf(i ,t)
35
(12)
Aj. rS H,/(J, t) ..
Последнее равенство обеспечивается при допущении in Const в интервале времени , что возможно, есЛи период наивысшей гармоники токов Т.7 J 1 ООП о. При выборе величины козффициента о( (8) и (11) следует исходить из того, что согласно (9) и (12) увеличение d приводит к уменьшению пульсаций, рассчитьшаемых велич ин векторных магнитных потенциалов и снижению,скорости решения задач из-за увеличения постоянных времени установления исследуемых процессов. Полученная система уравнений (3), (7), (8) и (11) позволяет за счет несущественного увеличения аппаратурных затрат путем депараллезации вычислительнод о процесса увеличить размерность решаемых на сеточных электрических моделях задач анализа синхронных машин.
914
При этом в электрической модели векторному магнитному потенциалу А оригинала ставится в соответствие электрический потенциал модели, удель- ному магнитному сопротивлению V - удельное активное сопротивление Р, а токам 1(( обмоток машины - сторонние токи J. рр, вводимые в соответствующие узлы сеточной модели (в отличие от реальных модельные токи обозначены с черточкой сверху). Члены уравнения (8) и (И), содержащие множитель d , воспроизводятся конденсаторами периодически включаемыми между соответствующини узлами сеточной модели и нулевой шиной.
В.блоке моделирования магнитного поля устройства реализуется система уравнений (3), (7), (8) и (11) при N 2.
В аналоговом блоке осуществляется решение в координатных осях d и q системы дифференциальных уравнений электрического равновесия синхронного генератора, работающего на автономную индуктивно-активную нагрузку. Так как резистивная сетка 1 не воспроизводит поле лобового рассеяния обмоток машины, указанную систему уравнений целесообразно представить в виде
V
а:
Ь„)1
В исходном состоянии генератор прямоугольных импульсов включен. П ле подачи на клемму 51 напряжения, соответствующего напряжению возбуж дения и, на выходе интегратора 34
J J дения Ur, на выходе интегратора J4 р-L (L + . формкруется напряжение, пропорцион + r)idJ;
р (R
нальное У -i- . При этом выходной ток интегратора 34, пропорциональный току I г обмотки ротора, пр протекает через соответствующий мо
Ф
- (L t + ь„)1 р.С-ыц/; -н
+ оо(1с + (RH + r)
,h.h
(Uf
.
где v yij V f- соответственно продольная и поперечная составляющие потоко- сцепления обмотки статора, потокосцеп- ления обмотки ротора, воспроизводимые на р езистивной сетке 1 ;
45 клеммами 31 и 37 аналогового блока, преобразуется в переменный ток прямоугольной формы, который после трансформации вьтрямляется мостовыми инверторами групп 19 и 19, соединен50 ньк с трансформаторами 14 и 15, и поступает на соответствующие конденсаторы групп 21 и 21 . Указанные конденсаторы, заряжаемые током l через мостовые инверторы групп 18, 18 и Ln - индуктивность лобово- 55 9 5 посредством управляемых в
го рассеяний обмотки противофазе ключей 22 и 23 подключаются к узлам 27 и 28 резистивной сетки 1 , в которые вводятся токи, соот- ветствующие ЩС катушек обмотки роротора;
- индуктивность, учитывающая отличие полей
10
рассеяния обмотки статора от измеренных на резистивной сетке 1;
- активное сопротивление обмотки статора;
К„- индуктивность и активное сопротивление нагрузки генератора;
IQ - продольная и поперечная составляющие тока обмотки статора;
и
г - соответственно напряжение, ток и активное сопротивление обмотки возбуждения.
По сравнению с известным методом параллельного сеточного моделирования магнитного поля в пределах одного полюсного деления машины в предлагаемой модели депараллепизация вычислительного процесса при тех же масштабах переменных требует в соответствии с уравнением (7) увеличения проводимостей резистивной сетки 1 в N 2 раза.
Устройство работает следующим образом.
В исходном состоянии генератор 52 прямоугольных импульсов включен. После подачи на клемму 51 напряжения, соответствующего напряжению возбуждения и, на выходе интегратора 34
дения Ur, на выходе интегратора J4 формкруется напряжение, пропорциональное У -i- . При этом выходной ток интегратора 34, пропорциональный току I г обмотки ротора, про- протекает через соответствующий мостовой инвертор группы 20, первичные обмотки 16 группы трансформаторов 14 и 15 и резисторы 42 и 43, причем указанньй ток посредством мостового инвертора группы 20, соединенного с
клеммами 31 и 37 аналогового блока, преобразуется в переменный ток прямоугольной формы, который после трансформации вьтрямляется мостовыми инверторами групп 19 и 19, соединенньк с трансформаторами 14 и 15, и поступает на соответствующие конденсаторы групп 21 и 21 . Указанные конtopa (фиг. 1). При этом в одном из Фостояний ключей 22 и 23 резистивной Меткой 1 моделируется магнитное поле 1 пределах одной половины полюсного ;5(еления машины, а в другом состоянии (Определяется магнитное поле в преде- jjiax второй половины полюсного деле1 ИЯ.
Напряжение на резисторе 43, пропорциональное току If , поступает на иторой вход интегратора 34 для учета падения напряжения на активном сопроривлении Г .обмотки возбуждения. Ре- 45 Ля в пределах одной-половины полюсно- писторы 42 и 43 выбираются с таким )асчетом, чтобы суммарное падение напряжения на них от выходного тока ин
гегратора 34 соответствовало потокощеплению лобового рассеяния обмотки ротора.
Формируемые в узлах 24-26 рези- (Ьтивной сетки 1 напряжения через ключи 22 и 23 поступают на зашунтирован- конденсаторами группы 21 и 21, ходы мостовых инверторов 18 и , 1|1осредством которых преобразуются в 1|1еременные напряжения прямоугольной сюрмы, постзшающиё на первичные об- потки 11 трансформаторов 9 и 10. 06- азуемые при этом напряжения на по- (У1едовательно соединенных вторичных обмотках 12 и 13 трансформаторов. 9 и
О суммируются таким образом, что по- (|;ле .их выпрямления посредством мосто- ibix инверторов 18 и 18 на клеммах t9, 35 и 30, 36 аналогового блока Создаются напряжения, пропорциональ- |1ые потокосцеплениям ф и yL обмотки Статора. Под действием указанных на- 1 1ряжений в цепях резисторов 38-41 |Ьюрмируются токи, пропорциональные 1
, в результате чего на выходах
KI,
.Штеграторов 32 и 33 измеряются на- йряжения, пропорциональные
d- (4 )1 и V .-(L , -ЬЬ,)
При этом возникающие в модели об- bjiOTOK из-за депараллелизации вычислительного процесса пульсации токов (tглaживaютcя посредством группы конденсаторов 21 и 21.
го деления конденсаторы группы 5 включаются между соответствующими граничными узлами резистивной сетки и нулевой шиной в прямом направлении,
20 а при моделировании магнитного поля в пределах другой половины полюсного деления - в обратном направлении. При этом масштаб времени .исследуемого процесса выбирается с таким расче25 том, чтобы изменение напряжений на конденсаторах групп 5 и 6 за период коммутации мостового инвертора бьшр пренебрежительно мало.
30 Формула изобретения
Устройство для моделирования магнитных полей в синхронных машинах, содержащее блок моделирования магнит3g ного поля, включающий двумерную рези- стивную сетку в полярных координатах, узлы тангенциальной границы которой соединены с шиной-нулевого потенциала, блок задания граничных условий
40 на радиальных границах, блок задани|1 магнитодвижущей силы и формирования потокосцепления обмоток, включающий выходную группу мостовых инверторов, в каждое из плеч которых включен ключ,
45 и блоки моделирования поля статора и
ротора, каждьй из которых включает две группы трансформаторов, последовательно соединенные первые вторичные обмотки трансформаторов первой и вто50 рой групп блока моделирования поля статора, последовательно соединенные вторые вторичные обмотки трансформаторов первой и второй групп блока моделирования поля статора и послеОпределяемые посредством резистивНой сетки 1 последовательно во вреце- gg довательно соединенные первичные об- Ни результаты моделирования магнитно- мотки трансформаторов первой и второй поля в пределах двух граничащих групп блока моделирования поля рото- г|о оси q (фиг. 1) ГОЛОВИН полюсного ра подключены к выводам первых диаго- Деления машины должны быть согласова- налей мостовых инверторов выходной
ны, т.е. потенциалы вдоль оси q должны быть равны, а вдоль оси d равны по модулю и противоположны по знаку. С этой целью между граничными узлами вдоль осей d и q и нулевой шиной включены соответственно группы конденсаторов 5 и 6, причем конденсаторы группы 5 включены через мостовые инверторы группы 4, а конденсаторы группы 6 - непосредственно. Мостовые инверторы Группы 5 управляются синхронно с группами ключей 22 и 23, благодаря чему при моделировании магнитного поФиг,Г
гч « 5 /
Фие.2
55
55
| Фринджибашян Э.С | |||
| и др | |||
| Матема- тическо ё моделирование в задачах ана-, лиза и синтеза электрических машин | |||
| - Известия АН СССР | |||
| Энергетика и транспорт, 1975, № 2, с | |||
| Устройство для выпрямления опрокинувшихся на бок и затонувших у берега судов | 1922 |
|
SU85A1 |
| Устройство для моделирования синхронной машины | 1982 |
|
SU1125633A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
