Изобретение относится к области вычислительной техники.
Известны пробивные механизмы перфораторов, содержащие кулачковый .привод с промежуточной собачкой для сообщения пуансону возВратно-поступательного движения.
В известных пробивных механизмах применены рабочие пружины возврата якоря, управляющего электромагнита и пружина поворота промежуточной собачки.
Предложенное устройство отличается тем, «то в нем на валу с лопастями кулачкового привода укреплены ролики, находящиеся в соприкосновении с профилированными рабочими поверхностями нажимной собачки и собачки Возврата, выполненными в виде качающихся рычагов, кинематически связанных с пуансоном.
Это отличие позволяет повысить быстродействие и надежность пробивки.
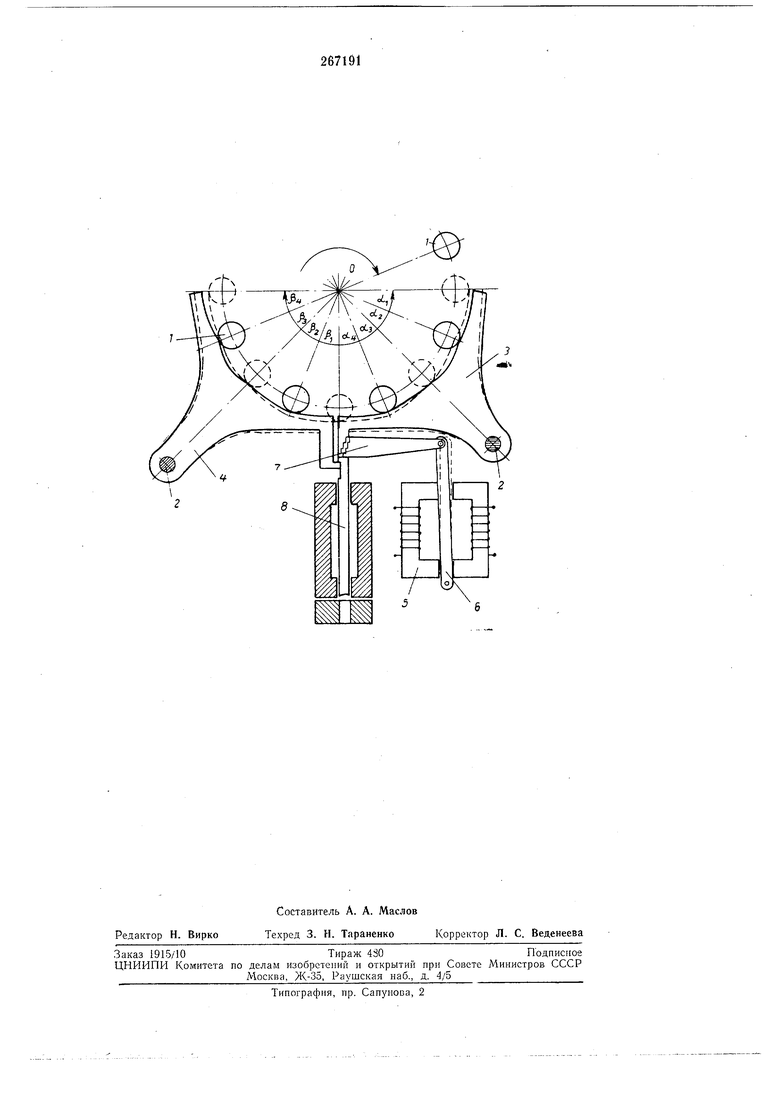
На чертеже приведена кинематическая схема пробивного механизма.
На приводном валу с осью -вращения О закреплено восемь лопастей (на чертеже не показаны), расположенных под углом 45 одна относительно другой. На концах лопастей установлены на осях ролики / (8 штук), а на осях качания 2 - нажимная собачка 3 и собачка возврата 4. Рабочие поверхности собачек профилированы.
Для управления пробивкой установлен электромагнит 5 двустороннего действия с якорем 6 и промежуточной собачкой 7. В верхнем положении пуансон 8 может удерживаться плоской пружиной-консолью (на чертеже не показана).
Исходное положение механизма (пуансон в верхнем положении) показано на чертеже сплошными линиями. Углы Ог и Pi равны 22,5°.
Углы между прямыми, проведенными через центр оси приводного вала и оси 2 качания нажимной собачки и собачки возврата, составляют с вертикалью 45°.
Наличие восьми лопастей с роликами приводит к тому, что в любой момент на обеих собачках находятся минимум два ролика, обеспечивающих работу собачек.
На чертеже показана схема для пробивки одним пуансоном. Ори попозиционной пробивке перфокарт число пуансонов, электромагнитов и управляющих планок должно равняться числу колонок перфокарты, а при локолонной пробивке - соответственно числу позиций. При повороте одной из лопастей с роликом на угол 02, три другие лопасти с роликами поворачиваются соответственно на углы «4, р2 и Р4. Рабочие профили собачек 3 и 4 построены так, что ролики все время неотрывно следят по их профилированным поверхностям.
При повороте второго ролика / на угол «4 левый конец нал имной собачки 3 перемещается вниз на величину нолного рабочего хода пуансона 8. При этом первый ролик является поддерживающим и неотрызно следит но поверхности собачки 3. Одновременно третий ролик 1, поворачиваясь с лопастью на угол ра, продвигает правый конец собачки возврата вниз тоже на величину полного хода пуансона. Четвертый ролик в это время является поддерживающим и неотрывно следит по рабочей ловерхности собачки возврата 4. Так происходит ЦИКЛ пробивки.
В дальнейшем правый верхний ролик, поворачиваясь на угол cci, поворачивает нажимную собачку по часовой стрелке, а ее левый конец движется вверх. Первый ролик в это время поворачивается на угол дз, являясь поддерживающим. Второй ролик -переходит с собачки 5 на собачку 4, поворачивается на угол PI и тоже является поддерживающим. Третий ролик, поворачиваясь на угол -рз, поворачивает собачку возврата 4 лротив часовой стрелки, а пуансон выступом собачки возврата вытаскивается из матрицы в исходное положение. Так происходит цикл вытаскивания пуансона из матрицы.
В дальнейшем работа механизма повторяется.
Нужно отметить, что рабочие профили собачек 3 н 4 построены таким образом, что во время цикла пробивки движение собачки возврата 4 опережает движение промежуточной собачки 7, а во время -цикла вытаскивания пуансона движение нажимной собачки опережает движение собачки возврата.
Управляющий электромагнит 5 .в зависимости от сигналов, поступающих на обмотки электромагнитов, притягивает якорь 5 в ту или иную сторону. Управление электромагнитом осуществляется так, что наличие сигнала в левой обмотке исключает наличие сигнала в правой обмотке и наоборот. К концу якоря 6 шарнирно присоединена промежуточная собачка 7. По мере протягивания якоря 6 влево собачка тоже передвигается влево, а усилие от нажимной собачки 3 передается пуансону- происходит перфорация. По мере притягивания якоря направо собачка 7 тоже перемещается направо разрывая кинематическую цепь: нажимная собачка 3 - пуансон 8. Поэтому при перемещении левого конца нажимной собачки 3 вниз перфорации не произойдет.
Для уменьшения хода якоря рабочая часть промежуточной собачки 7 выполнена ступенчатой.
Конструкция пробивного механизма обеспечивает быстродействие -порядка 150-200 гц.
Предмет изобретения
Пробивной механизм перфораторов, содержащий кулачковый привод с промежуточной собачкой для сообщения возвратно-поступательного движения пуансону, отличающийся тем, что, с целью повышения быстродействия
и надежности пробивки, в нем на валу с лопастями кулачкового привода укреплены ролики, находящиеся в соприкосновении с профилированными рабочими поверхностями нажимной собачки и собачки .возврата, выполненными в виде кинематически связанных с пуансоном качающихся рычагов.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОБИВНОЙ МЕХАНИЗМ ПЕРФОРАТОРОВ | 1970 |
|
SU271134A1 |
| Перфоратор репродукционный для дублицирования отверстий в перфокартах | 1952 |
|
SU99185A1 |
| Наборная машина для управления на расстоянии воспроизводящими перфораторами | 1949 |
|
SU98240A1 |
| Пробивной механизм для перфоратора | 1978 |
|
SU742979A1 |
| Реперфоратор | 1971 |
|
SU462302A1 |
| УСТРОЙСТВО для ТРАНСПОРТИРОВКИ ПЕРФОКАРТ | 1970 |
|
SU281296A1 |
| Пробивной механизм для карточного перфоратора | 1987 |
|
SU1481810A1 |
| ПРОГРАММИРУЮЩЕЕ УСТРОЙСТВО | 1968 |
|
SU206890A1 |
| УСТРОЙСТВО для ЗАПИСИ НА ПЕРФОКАРТУ | 1972 |
|
SU354435A1 |
| ЛЕНТОЧНЫЙ ПЕРФОРАТОР | 1969 |
|
SU232618A1 |