Устройство предназначено для дистанционного управления регулирующими органами.
Известны силовые следящие приводы, содержащие приемно-контрольное и распределительное устройства. Эти устройства обладают сравнительно небольшим коэффициентом полезного действия и низкой точностью.
Предложенное устройство отличается от известных тем, что выход приемно-контрольного блока, совмещенного с клапаном, соединен со входным каналом инверсирующего блока и с одной из полостей исполнительного механизма, а также тем, что приемно-контрольный блок выполнен на основе безрасходного двухмембранного преобразователя, в котором сопло стравливания размещено в центре одной из мембран, а сопло питания - в корпусе вунтри блока мембран.
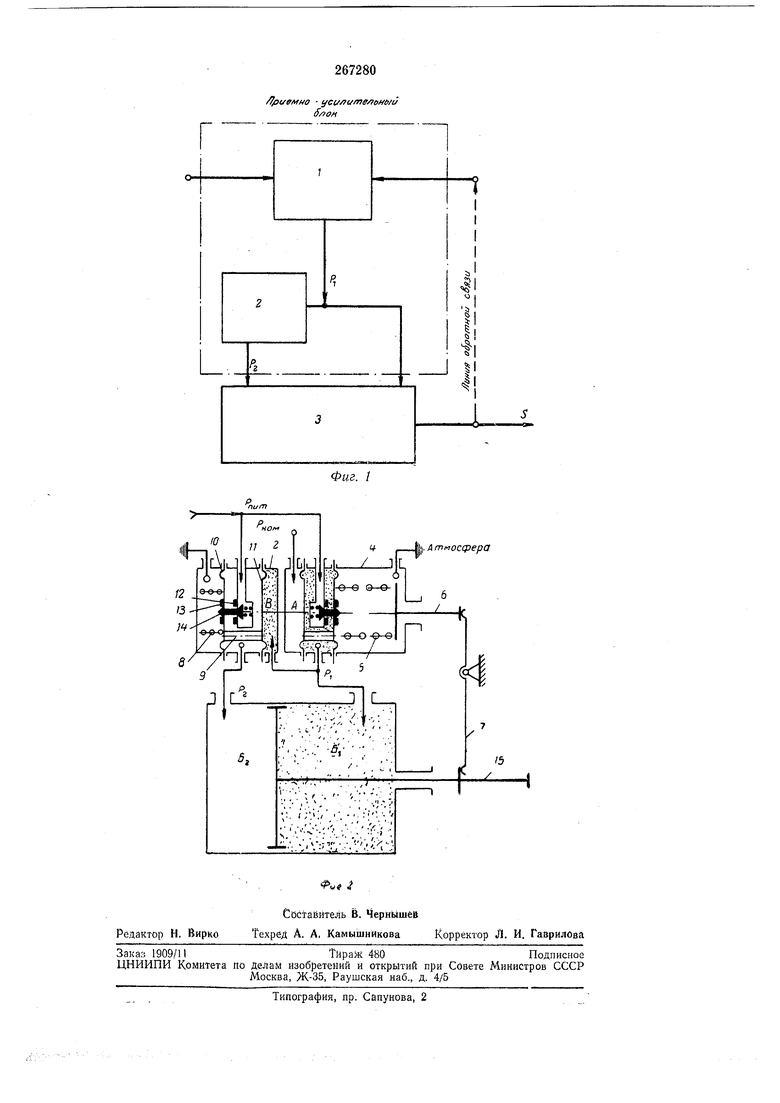
На фиг. 1 представлена блок-схема устройства; на фиг. 2 - принципиальная схема устройства.
Устройство содержит приемно-контрольный / и инверсирующий 2 блоки и исполнительный механизм 5.
Приемно-контрольный блок имеет распределитель (регулирующий орган) и связан с остальной частью схемы одним каналом, передающим объединенный, используемый для управления обеими полостями исполнительного механизма сигнал рассогласования команды
и контроля. Связь канала с одной из полостей сервомотора осуществляется с помощью инверсирующего блока 2, подающего давление в соединенную с ним полость исполнительного механизма при падении давления в упомянутом канале сигнала рассогласования.
Приемно-контрольный блок состоит из приемно-контрольного усилителя 4, снабженного
камерой А приема командной информации и пружиной 5 обратной связи, составляющей вместе с толкателем 6 и рычагом 7 канал нередачи контрольного воздействия (канал обратной связи).
В данной схеме приемно-контрольный блок непосредственно (без промежуточных усилителей) управляет давлением силовой среды в полости Б (Явых PI)Канал выхода (давление PI) прнемно-контрольного блока связан также и с камерой В приема блокирующего сигнала, принадлежащей инверсирующему блоку 2, управляющему уровнем силового давления противоположной полости БаУровень давления Р-2 блокирующего сигнала задается блокирующей пружиной 8.
и И, сопел питания 12 и стравливания 13 и клапана 14. Коэффициент усиления определяется отно-Риых
шением К, -
ком
Инверсирование входного сигнала (давление Р-2 растет с понижением давления PI) осуществляется в инверсирующем блоке 2 благодаря, например, размендению камеры В со стороны мембраны (логическая операция «нет).
При увеличении усилия нагрузки, действующего, например, в нацравлении растяжения штока 15, поршень сместится вправо, поджимая пружину 5 обратной связи через передачу 5 и 7. Блок мембраны усилителя 4 сместится под действием избыточного усилия пружины влево, открывая сопло 12 питания. Давление в рабочей полости Б возрастет и поршень пойдет влево, так как давление в полости Бблагодаря действию блокирующей связи равно атмосферному.
При появлении в полости Si давления блок мембран инверсирующего блока 2 посылается влево, сжимая блокирующую пружину 8 и открывая соцло 13. Таким образом блокирующая пружина выявляет наличие давления в полости -бь обычно она настраивается на уровень давления, близкий к атмосферному.
После возвращения поршня в прежнее положение, отвечающее давлению сигнала, перекрываются оба сопла. Расходование силовой среды прекращается, и устанавливается равновесный режим.
При перемене направления усилия нагрузки (усилие сжимает шток) поршень пойдет влево, ослабляя пружину 5. Полость Б через сопло стравливания 13 соединяется с атмосферой. При падении давления в полости Б до уровня затяга блокирующей иружины 8 инверсирующего блока 2 последняя перемещает блок мембран этого усилителя вправо, открывая его сопло 12 питания.
Давление в полости Ба начинает повышаться.
Таким образом, при действии усилия нагрузки влево работают два последовательно включенных элемента - усилитель 4 и блок 2, благодаря чему суммарный коэффициент усиления цепи равен К Kj, здесь Д - коэффициент усиления одного усилителя.
В отличие от схемы с механической блокировкой сдвоенных, работающих только параллельно усилителей, здесь могут включаться оба усилителя последовательно, что приводит к повышению коэффициента усиления и, следовательно, точности сервомотора при том же количестве используемых усилителей (в данном случае двух).
Предмет изобретения
1.Силовой следящий привод, содержащий исполнительный механизм, клапан, приемноконтрольный и инверсирующий блоки, отличающийся тем, что, с целью повышения точности, в нем выход приемно-контрольного блока, совмещенного с клапаном, соединен со входным каналом инверсирующего блока и с
одной из полостей исполнительного механизма.
2.Привод по п. 1, отличающийся тем, что, с целью увеличения коэффициента полезного действия, приемно-контрольный блок выполнен на базе безрасходного двухмембранного преобразователя, в котором сопло стравливания размещено в центре одной из мембран, а сонло питания - в корпусе внутри блока мембран.
/ pUfMHO - yCi// Uff e OHC tU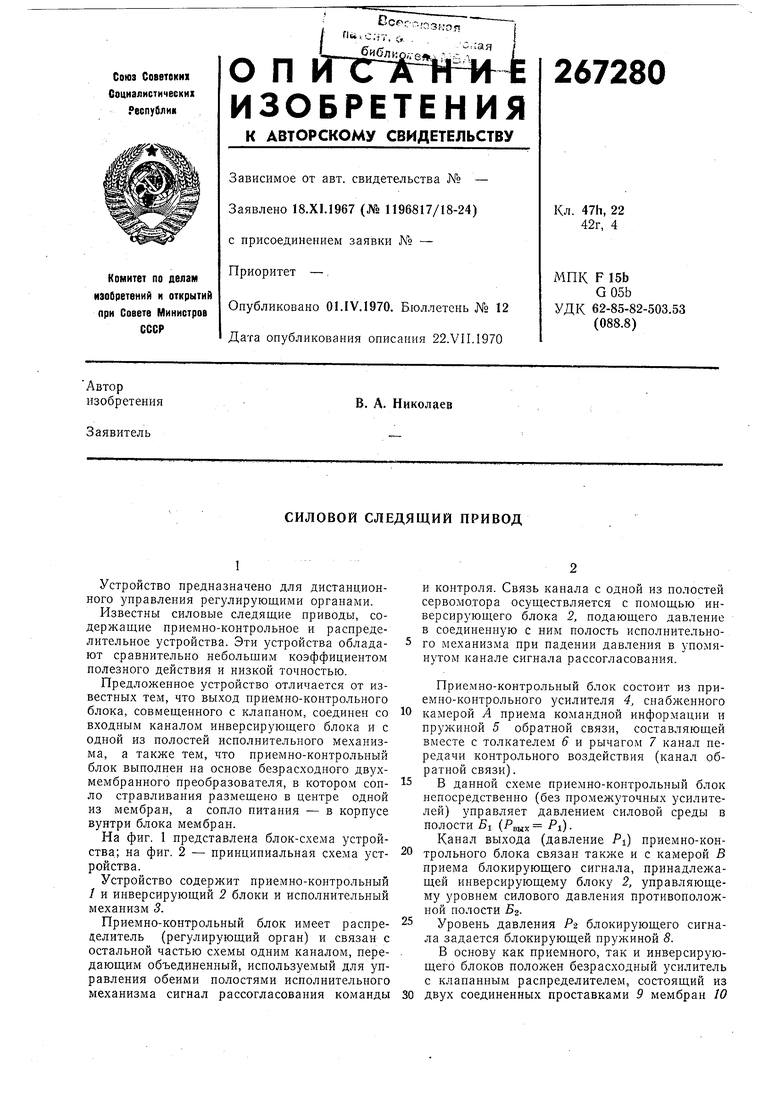
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматический следящий привод | 1974 |
|
SU510589A1 |
| Преобразователь силового воздействия в пневматический сигнал | 1977 |
|
SU699362A1 |
| Автоматическая пневматическая сеткоправка для бумаго- и картоноделательных машин | 1974 |
|
SU525929A1 |
| Устройство для ультразвукового исследования глаза | 1977 |
|
SU695660A1 |
| Система регулирования питательных турбонасосов | 1983 |
|
SU1161790A2 |
| Система регулирования паровой турбины | 1986 |
|
SU1401147A1 |
| БЛОК УСИЛЕНИЯ СЛЕДЯЩЕГО СЕРВОПРИВОДА | 1971 |
|
SU310064A1 |
| БС?С?СЮ:»4йШ ЯАТеиНО-ТЕШ^ | 1973 |
|
SU363960A1 |
| Сильфонный исполнительный механизм | 1973 |
|
SU540061A1 |
| Система регулирования питательных турбонасосов | 1986 |
|
SU1372071A1 |