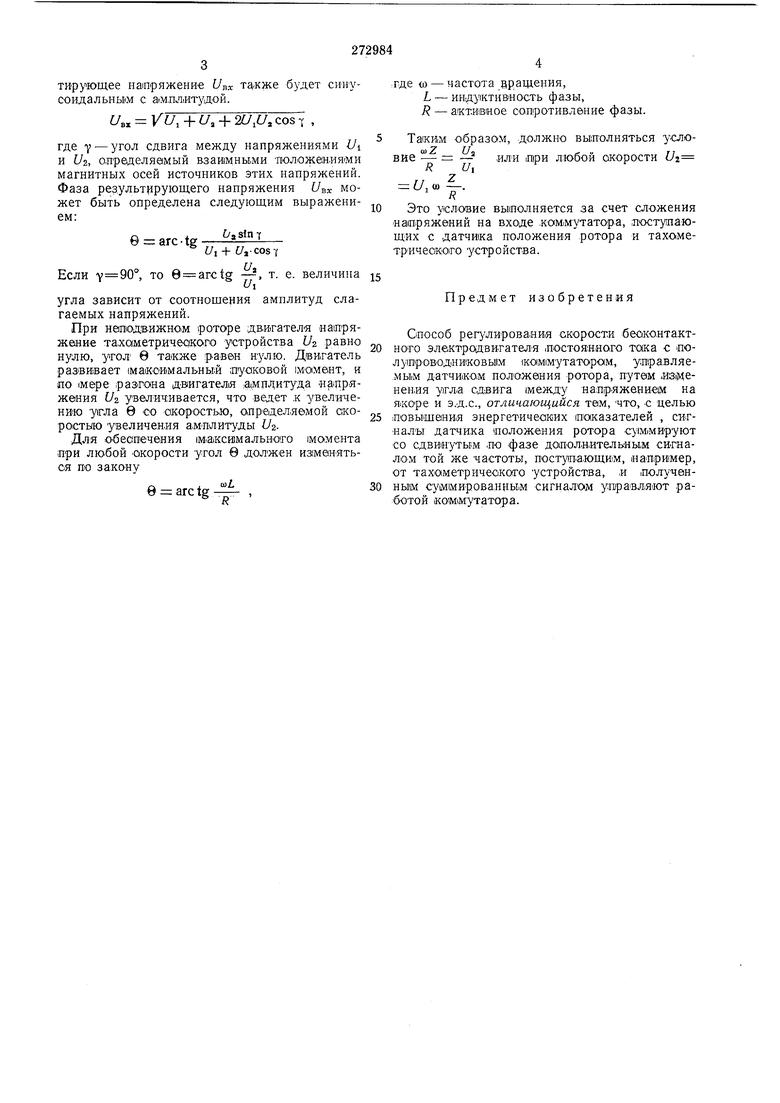
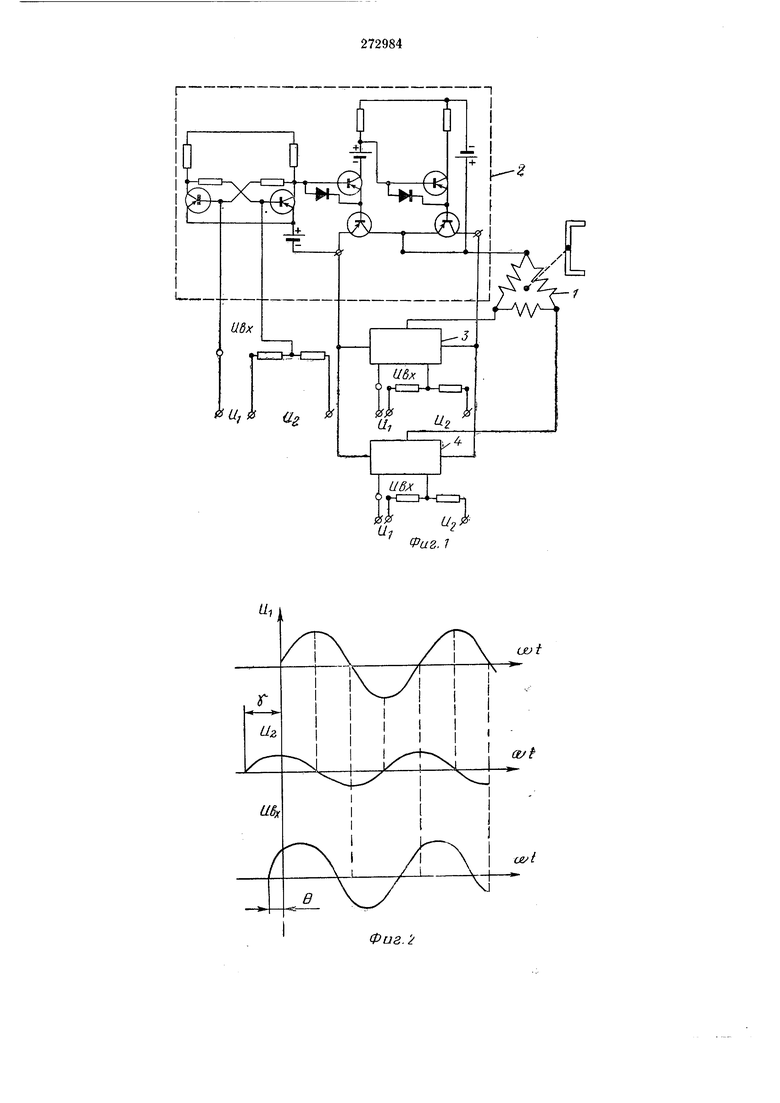
Известен способ регулирования беоконтактНОГО электродвигателя с питанием от сети постоянного тока через полупроводни ковый коммутатор, лутем из менения утла между нагаряжеяием л.итания и э.д.с. якорной обмотки. Регулирование двигателя осуществляют ПОдачей дополнительного сигнаЛ:а от вопомогателыного источника напряжения на вход усилителей-ограничителей, нагаршмер, через резисторы или диоды. С целью повышения энертетичеаких показателей и расширения регул ировамия управл-яюши:й сигнал получают сложением сигнала от вспамОгательиого источника напряжения, например тахаметрического устройства, ,и от датчика положения ротора, сигналы 1которых сдвинуты по фазе относительно друг друга. Наиболее удобно уопользовать предлагаемый СПОСО.6 регулирования при одноиаправленнол вращении двигателя. На фиг. 1 показана схема бесщеточного двигателя с трехфазной обмоткой статора; яа фиг. 2 - эпюры напряжения в соответствующих фазах датчика положения Ui, тахометрического устройства f/2 и суммарное напряжение :на Входе коммутатора. тока в .которой осуществляется полупроводни.ковым ,ком|мутатором, состоящим из трех идентичных блоков 2-4. Регулирование двигателя п,утам из.менения угла 6 осуществЛ(Яют сложением на входе ,кам:мутатора си.гналов с датчИ|Ка положения ротора Ui и тахометричесокго устройства U2Частота сигналов датчика полол ения равна частоте сигналов тахаметрического устройства. Чередование фаз датчика положения соответствует чередованию фаз тахометрического устройства. Если предполож.ить, что переключение полупроводниковых элементов кам1Мутатора про.нсходит мгновенно и на пути 1прохождения сигнала нет реактивных элементов, изменяющих его фазу, то фаза напряжения на выходе к-ам.м татора соответствует фазе сигнала на его входе, например, от датчика положения ротора. Дл1Я из.менения фазы напряжения «а выходе ком1мутатора надо соответственно изменить фазу сигнала на его входе. Фаза входного сигнала будет определяться сдвигом 1между магнитными осями датчика положения ротора и тахометрического устройства. Если напряжения от датчика положения Ui (фиг. 2) и тахометрического устройства Uпо форме близки к синусоидальной, то результирующее наоряжение тд-кже будет синусоидальным с амллитудой. зх YU,+U, + 2U,U,cos , где 7 - угол сдвига между напряжениями Ui и Uz, олределяамый взаимными положен.ияМИ магнитных осей источников этих напряжений. Фаза результирующего напряжения t/вх может быть определена следующим выражением:: arc-tg Ui + t/j-cos-y Если , то e arctg -, т. е. величина угла зависит от соотношения амплитуд слагаемых напряжений. При неподвижном роторе дви1гателЯ «алряжеяие тахаметричеокого устройства Uz равно нулю, зтол в та1кже равен нулю. Двигатель paзвиiвaeт (максимальный пусковой момент, и по (Мере раЗГана двигателя :а(Мпдитуда «aijipflжения Uz увелич:ивается, что ведет .к увеличению угла в со скоростью, определяемой скоростыю увеличения амплитуды Uz. Для обеспечения максимального момента при любой скорости угол в должен иаменяться по за.ко-ну О arc tg :где to - частота вращения, L - индуктивность фазы, R - активное со.П ротивление фазы. Таким образам, должно выполняться условие - - - иЛИ лри любой скорости Ut ,, Z 1-.--. Это выполняется за счет сложения напряжений на входе коммутатора, тоступаюЩИх с датчика положения ротора и тахометр«чеоко1го устройства. Предмет изобретения Способ рег)лировайи,я скорости -беоконтактного электродвигатеЛЯ лостояндого така с полу1П1роводни1Ковы1м коммутатором, улравляе.MbiiM датчиком положения ротора, путем .,из1менен.ия угла сдвига между наяр-яжением на якоре и Э.Д.С., отличающийся тем, что, с целью ловышанид энергетических показателей , сигналы датчика иоложения ротора су1ммируют со сдвинутым ло фазе до1полн,ительным си.гнаЛОМ той же частоты, посту пающи1М, например, от тахометричеокото устройства, .и полученным сумсйировалцым сигналом управляют работой комимутатора.
fi
ИВл
Г
it
Фиг. 1
| название | год | авторы | номер документа |
|---|---|---|---|
| ЦИФРОВОЙ ФАЗОМЕТР | 1973 |
|
SU385236A1 |
| Реверсивный вентильный электродвигатель | 1977 |
|
SU744861A1 |
| Синхронизированный бесконтактный электропривод постоянного тока | 1977 |
|
SU731521A1 |
| УСТРОЙСТВО для ИЗМЕРЕНИЯ ОТНОШЕНИЯ СИНУСОИДАЛЬНЫХ СИГНАЛОВ | 1969 |
|
SU257610A1 |
| Способ преобразования перемещение-фаза | 1987 |
|
SU1474446A1 |
| ПРЕОБРАЗОВАТЕЛЬ УГОЛ-КОД | 1972 |
|
SU357582A1 |
| Бесконтактный привод постоянного тока | 1975 |
|
SU655037A1 |
| Устройство измерения скорости вращения бесконтактного двигателя постоянного тока | 1977 |
|
SU662867A1 |
| БЫСТРОДЕЙСТВУЮЩИЙ МНОГОФУНКЦИОНАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА В КОД ДЛЯ УСТРОЙСТВ ЭЛЕКТРОМЕХАНОТРОНИКИ | 1994 |
|
RU2094945C1 |
| Способ управления вентильным электродвигателем | 1989 |
|
SU1690160A1 |
(Mi
I --Н- 1
о/
