Изобретение относится к системам с широтно-импульсной модуляцией и мол:ет быть использовано для увеличения точности и упрощения привода с бесконтактными двигателями постоянного тока с позицион110 зависимой модуляцией фазных напряжений (БДПТ ПМ). Известен бесконтактный привод постоянного тока, в котором стабилизация скорости осуществляется за счет охвата двигателя тахометрической отрицательной обратной связью. В качестве датчиков скорости указанных приводов, как правило, используют нереверсивные синхронные тахогенераторы с постоянными магнитами 1. Пульсации выходного выпрямленного напряжения таких таходатчиков достигают 14%, что снижает точность привода с использованием синхронных датчиков скорости особенно на низких частотах вращения двигателя, когда затруднена фильтрация указанных пульсаций. Наличие тахогенератора усложняет привод. Известен электропривод 2, в котором отсутствует тахогенератор, а стабилизация скорости достигается за счет формирования более жесткой механической характеристики в бесконтактном двигателе постоянного тока за счет регулирования длительности подключения фазы двигателя к сети. Регулирование осуществляется параметрически за счет вычитания из интервала, определяемого датчиком положения ротора, заданного временного интервала. Недостатком устройства является то, что регулирование осуществляется на частоте вращения. Это снижает точность регулирования. Прототипом изобретения является устройство 3J, которое содержит бесконтактный привод постоянного тока с щиротно-импульсным магнитомодуляционным датчиком положения. В нем стабилизация скорости осуществляется с помощью дополнительного преобразователя, что снижает точность стабилизации скорости. Целью изобретения является повыпиение точности стабилизации скорости. Указанная цель достигается путем совмещения функций щиротно-импульсных магнитомодуляционных датчиков положения ротора (ДПР), входящих в состав БДПТ ПМ, с датчиками тахогенератора. Д,ля этого в цепь каждой фазы БДПТ ПМ включаются последовательно соединенные схема задержки импульсов, сумматор по модулю два, расширитель импульсов и логическая схема запрета, причем выход формирователя сигналов ДПР подключен ко входу схемы задержки, к первому входу сумматора по модулю два, к второму входу которого подключен выход схемы задержки, и к входу логической схемы запрета, а выход сумматора по модулю два подключен к входу расширителя импульсов, выход которого соединен с запрещающим входом логической схемы запрета, выход которой подключен к входу силового ключа фазы двигателя.
Таким образом, сигнал о скоростях вращения двигателя получается в импульсном виде, как и в прототипе, однако в предлагаемом устройстве замыкание отрицательной связи по скорости осуществляется в каждой фазе и без дополнительного преобразования (в импульсном виде), что и обеспечивает увеличение точности привода.
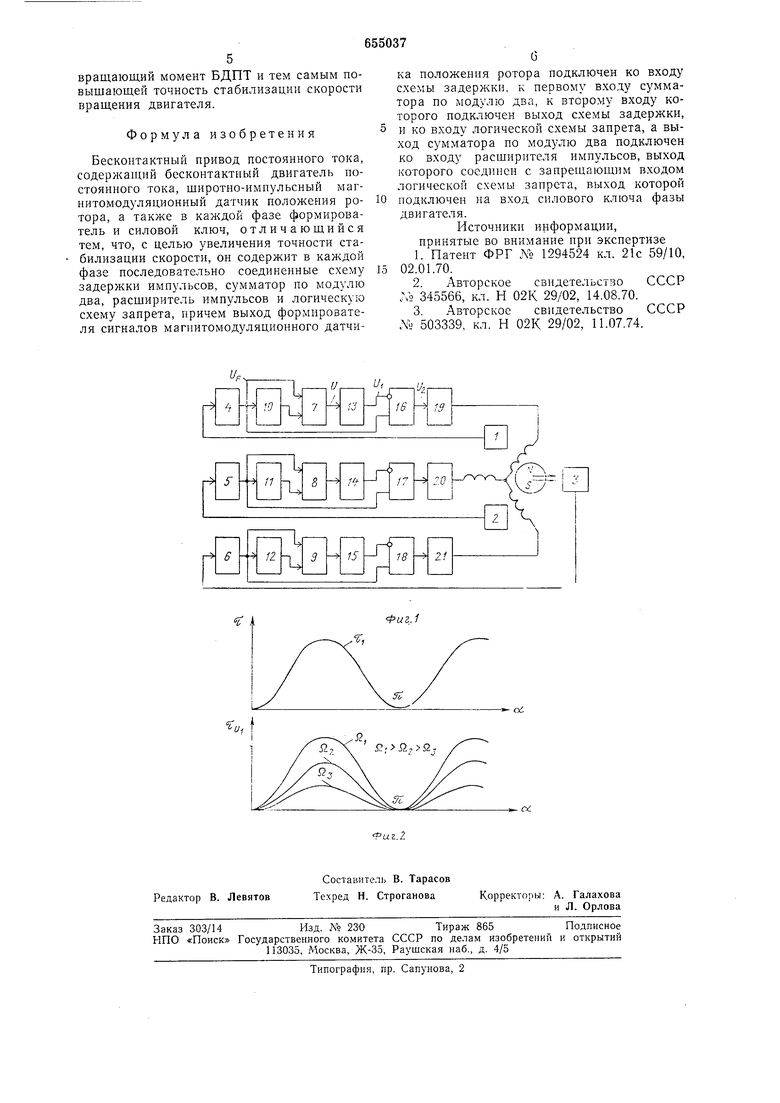
На фиг. 1 изображена функциональная схема привода; на фиг. 2 - диаграммы, поясняющие принцин работы привода.
Привод состоит из трех щиротно-импульсных ДПР 1, 2, 3, подключенных своими выходами к входу трех формирователей 4, 5,
6.Выходы формирователей подключены к первым входам логических схем сложения по модулю два 7, 8, 9 непосредственно, а к вторым входам - через схемы задержки импульсов на период несущей частоты 10, 11, 12. Выходы логических схем сложения по модулю два 7, 8, 9 через расщирители импульсов 13, 14, 15 подключены к запрещающим входам логических схем запрета 16, 17, 18, на входы которых подключены выходы формирователей 4, 5, 6. Выходы логических схем запрета 16, 17, 18 соединены с входами силовых ключей 19, 20, 21, коммутирующих обмотки двигателя.
Поскольку схема состоит из трех идентичных каналов, по числу фаз двигателя, рассмотрим работу одного канала.
На фиг. 2 кривая TI изображает зависимость относительных длительностей импульсов датчика положения ротора 1 для первой фазы.
Импульсы с ДПР 1, относительная длительность которых определяется положением вала БДИТ ПМ, через формирователь 4 поступают на первый вход логической схемы сложения по модулю два 7 непосредственно, а на второй вход - через схему задержки импульсов, на период несущей частоты 10. Кроме того, импульсы с выхода формирователя 4 поступают на вход логической схемы запрета 16. При отсутствии сигнала на запрещающем входе схемы 16, импульсы с выхода формирователя 4 через логическую схему 16 управляют работой силового ключа 19, коммутирующего одну из фаз двигателя. При вращении вала двигателя с угловой скоростью i на выходе логической схемы сложения по модулю два
7,появляются импульсы, относительная длительность которых tu изменяется по закону
с/
где 1т - амплитуда изменения относительной длительности;
а - угол поворота ротора БДПТ ПМ. Величина Тт определяется скоростью вращения вала БДПТ ПМ. Импульсы с выхода логической схемы сложения по модулю два 7 поступают на расщиритель 13, который выполняет функции усиления щиротноимпульсного сигнала U скорости. На фиг. 2
кривые И, QS, QZ изображают зависимости относительной длительности импульсов с выхода расщирителя 13 при различных скоростях вращения вала БДПТ ПМ и, причем . Таким образом, на выходе
схемы расширителя 13 получают импульсный сигнал L/i с относительной д.тительностью т,
U,, KpSma
//(л
т
где К.р - коэффициент расщирения импульсов, /С - коэффициент передачи устройства
измерения скорости, и - угловая скорость вращения вала
БДПТ ПМ.
Импульсы сигнала L/i поступают на запрещающий вход логической схемы 16, которая выполняет функции вычитания импульсных сигналов Up и Ui. Относительная длительность сигнала на входе схемы запрета 16 может быть записана в виде
Vr
и, 1
TI i:j,sina О , /CATpSsina.
40 Тогда
()sma.
Видно, что импульсы, поступающие через силовой ключ 19 на обмотку БДПТ ПМ, имеют относительную длительность Ту, которая синусоидально зависит от угла поворота ротора. Из выражения для амплитуды изменения т видно, что в фазе двигателя
осуществляется отрицательная обратная связь по скорости. Итак, двигатель по каждой фазе охватывается отрицательной тахометрической обратной связью. Коэффициент обратной связи можно варьировать, изменяя, например, коэффициент расширителя 13 /Ср устройства.
Таким образом, в предлагаемом приводе путем совмещения функций щиротно-импульсных датчиков угла с датчиками тахогенератора в каждой фазе обеспечивается отрицательная обратная связь по скорости при сохранении синусоидальной зависимости относительной длительности импульсов питания фазы двигателя от угла поворота
ротора, обеспечивающей непульсирующий
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство измерения скорости вращения бесконтактного двигателя постоянного тока | 1977 |
|
SU662867A1 |
| Бесконтактный тахогенератор | 1975 |
|
SU551563A1 |
| Бесконтактный электродвигатель постоянного тока | 1976 |
|
SU726632A1 |
| Вентильный электродвигатель | 1983 |
|
SU1108576A1 |
| Датчик положения ротора вентильного двигателя | 1978 |
|
SU748701A1 |
| Многофазный импульсный стабилизатор постоянного напряжения | 1980 |
|
SU935914A1 |
| Система для статической стабилизации частоты вращения бесконтактного двигателя постоянного тока | 1976 |
|
SU681514A1 |
| Бесконтактный тахогенератор | 1981 |
|
SU949504A1 |
| Цифровая следящая система | 1987 |
|
SU1730610A1 |
| Цифровая следящая система | 1987 |
|
SU1797093A1 |
