Изобретепие относится к устройствам для автоматического адресования подвижных объектов, например стеллажных штабелеров и рабочих органов торговых автоматов.
Известны аналогичные устройства, состоящие из датчика положения объекта, задаюндего переключателя с магнитоуправляемыми контактами, равпомерно расположениыми и радиально ориентированными на его нодвилсной круговой -плате, и постоянными магпнтами, закрепленными па подвижной плате напротив контактов с тем же шагом, что и последние, и электрической схемы, содержащей две параллельно подключенных к источнику питания цени. Каждая цепь образована реле и упомянутыми выше магнитоуправляемыми контактами, соединенными так, что к одному из реле параллельно подключены контакты, расположенные на одной половине ненодвил пой платы переключателя, а к другому -расположенные на другой ее половине. Такие устройства неудобны тем, что подвижные объекты имеют одну скорость, с которой иеремещаются в зону адресования и корректируют свое положение относительно места адресования, а также тем, что в таких устройствах отсутствует плавное регулирование пределов зоны адресоваиня.
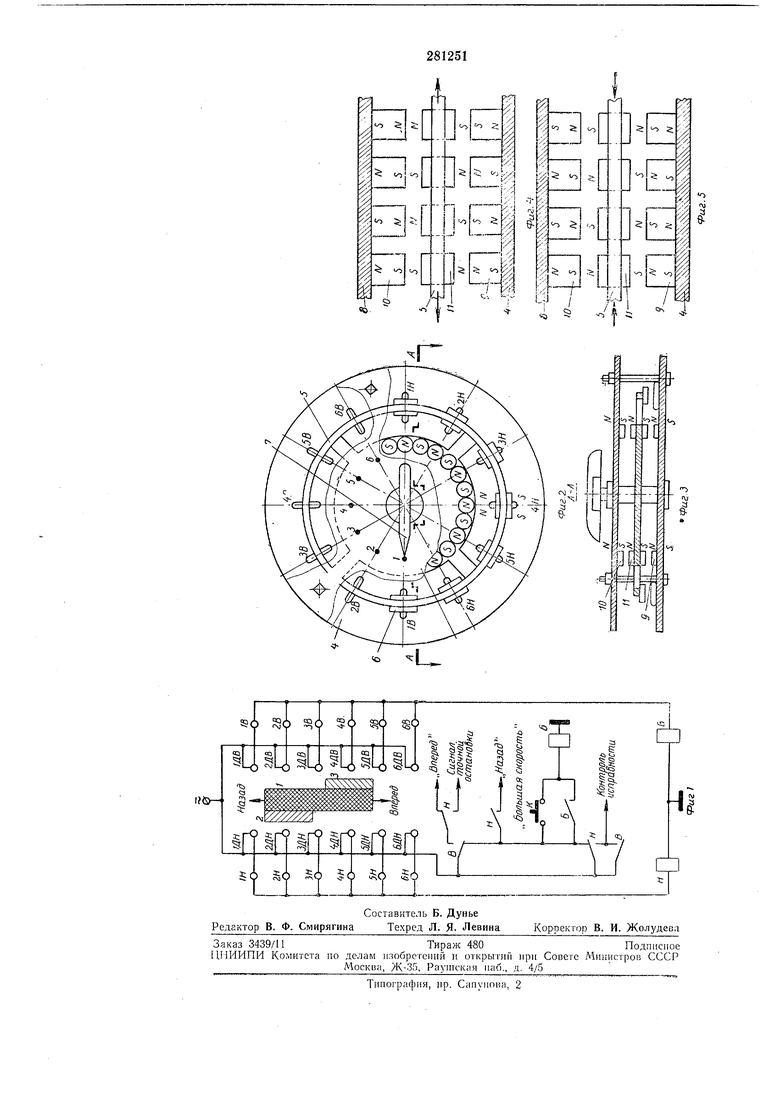
ректировки его положеиия относнтельно места адресования с ноннлсенной скоростью, а также плавного регул ирования пределов зоны адресования в предлагаемом устройстве датчик полол ения -объекта содерл ит магнитоуправляемые контакты, располол енные у кал дого из мест адресования попарно но разным сторонам трассы объекта и соединенные последовательно калсдый с одним контактом
задающего переключателя, так, что контакты одной нары подключены к контактам, расположенным на плате переключателя л.иаметрально противополол™о. Кроме того, датчик пололчения содерлсит постоянные магниты, закрбнленные на -подвижном объекте по обеим его сторонам, смещенные один относнтельно другого с таким расчетом, чтобы зоны одновременного включения обоих контактов, закрепленных у одного места адресовання, соответствовала допустимой зоне остаповки подвижного объекта, и имеющие зону действия в наиравлении перемещения, нревыщающую максимальное расстояние магнитоуправляемыми контактами смелшых мест адресоваи ия. При этом число постоянных магнитов, закрепленных на иодвнл ной плате переключателя, на едииицу превышает число мест адресования. Па фиг. 1 схематически изображен подвнл :плане) и электрическая схема предлагйемого устройства (число адресов равно шестн, а подвижный объект находится в рабочей зоне у третьего места адресовання); на фиг. 2 - задающкп переключатель, внд сверху; на фиг. 3 - разрез по А-Л на фиг. 2; на фиг. 4- взаимодействне постоян-ных магнитов ыенодвнжной и подвижной частей задающ.его переключателя в одном из неустойчивых ноложений - в положении неустойчивого равновесия; на фиг. 5 - то же, для фиксацян подвижной части переключателя в рабочем ноложенин - в состоянии устойчивого равновесия. Вдоль трассы перемещения подвижного объекта I (см. фиг. 1) с установленными на нем постоянными магнитами 2 и 3, двумя нараллельиым-и рядами (по два у нз мест адресования) закреплепы магн.итоуправляемые контакты 1ДВ, 1ДН, 2ДВ, 2ДН,..., 6ДВ, 6ДН датчика положения. Магнитные оси постоянных магнитов 2 и 3 параллельны магнитоуправляемым контактам 1ДВ, 1ДН, 2ДВ, 2ДН,..., 6ДВ, 6ДН. Такое расположение магнитных осей ностоянных магнитов 2 и 3 предпочтительно, хотя возможно и другое расноложение. С одной стороны эти магнитоуправляемые контакты подсоедннены к источнику нитания, а с другой - к магнитоуправляемым контактам задающего переключателя 1В, Ш, 2В, 2Н,..., 6В, 6Н соответственно. Контакты 1В, 2В,..., 6В подключены к обмотке реле В, а контакты Ш, 2Н,..., 6Н - к обмотке реле Я. Общая точка обмоток реле S и Я нодсоедипена к другому полюсу источника нитания. Постоянные магниты 2 и 5 расположены так, что каждый из них может включать магнитоунравляемые контакты только одного из рядов (1ДН-6ДН или 1ДВ-6ДВ соответственно). Зона одновременного включения обоих магнитоуправляемых контактов, закрепленных у одного места адресования, равна допустимой рабочей зоне остановки подвижного объекта. Зона действня каждого из магнитов 2 и 3 иа соответствующие магнитоуправляемые контакты в панравлении его перемещения превышает максимальное расстояние между магннтоунравляемыми контактами в этом направлении. Входачми электрической схемы управления являются контакты задающего переключателя 1В-6В, Ш-6Н, контакты 1ДВ-6ДВ, 1ДН- 6ДН, расположенные у мест адресоваппя вдоль трассы -перемещения подвнжиого объекта, и кнопка К. «Большая скорость. Выходами схемы управления являются провод «Вперед, провод «Назад, провод «Сигнал точной остановки, реле Б и нровод «Контроль исправности. Магнитоуправляемые контакты 1В-6В, 1Н-6Н закреплены на окружности неподвижной части 4 задающего переключателя (см. фиг. 2). Расстояние между магнитоунравляемыми контактами одинаково. Последовательность расноложепия соответствует сначала одному, а затем другому ряду закрепленных у мест адресования магнитоуиравляемых контактов при одииаковом наиравлеинн обхода обоих рядов. Па подвижной части 5 задающего переключателя, нанротнв магнитоуправляемых контактов его неподвнжной части, закреплены по окружности того же диаметра с тем же шагом миинатюрные постоянные магниты 6, количество которых равно числу мест адресования плюс единица. Подвижная часть 5 задающего нереключателя жестко связана с рукояткойуказателем 7. Шкала задающего переключателя находится на его неподвижной части 5. Взаимное расположение ностояппых магнитов 6 и рукоятки-указателя 7 таково, что при установке носледнего на первый адрес постоянные магниты 6 находятся напротив магнитоуправляемых контактов 1Н-6Н, 1В. На неподвижных частях 4 и 8 задающего нереключателя установлены ряды постоянных магнитов 9 и 10 соответственно. На подвижной части 5 закреплен ряд постоянных магнитов 11. Шаг установки постоянных магнитов Я 10 и 11 в рядах одинаков и равен половине шага магнитоуправляемых контактов 1В-6В, 1Н-6Н. Магнитные оси этих ностоянных магнитов перпендикулярны направленню неремещелия подвижной части переключателя и направлены в противоположные стороны у смежных постоянных магнитов одних и тех же рядов. При точной остановке постоянных магнитов 6 у магнитоунравляемых контактов ненодвижной части 4 задающего переключателя ностоянные магниты 11, 9 и 10 рядов соприкасаются (через воздушный промежуток) разноименными полюсами (см. фиг. 3 н 5). Если подвижный объект находится в рабочей зоне у третьего места адресования, т. е. у магнитоуправляемых контактов ЗДВ н ЗДН (см. фиг. 1), а задающий нереключатель установлен на первый адрес (см. фиг. 2), нредлагаемое устройство работает следующим образом. Постоянные магниты 6 замыкают контакты 1В, Ш-6Н. в начале работы устройства включают электропитание и нажимают на кнопку /( «Большая скорость. Через контакты ЗДН и ЗН срабатывает реле Н, унравляющее движением назад. Через размыкающ:ий контакт реле В и замыкающий Я нодается напряжение на выход «Назад. Через размыкающнй контакт реле В становится на самоблокировку реле Б, обеспечивающее нереключение скорости на большую (цепи привода на фнгурах не показаны). Подвилсный объект на большой скорости перемещается от третьего места адресования но нанравлению к первому. Пепь реле Я поддерживается поочередно контактам И ЗДН н ЗН; 2ДН и 2Н; 1ДН н Ш. Это движение продолжается до тех нор, нока магнит 3 не включит магнитоунравляемый контакт 1ДВ. При срабатывании контакта 1ДВ через него дается реле В и своим размыкающим контактом выключает выход «Назад и реле большой :корости Б. Выключается привод. Через замыкающие контакты реле В и.Я подается напряжение на выход «Сигнал точной остановки. Если подвижный объект по инерции прошел рабочую зону у первого места адресования, контакт 1ДН выключается. Через замыкающий контакт реле В и размЕякающпй контакт реле Н подается напряжение на выход «Вперед. Поскольку реле Б выключено, перемещение подвижного объекта 1 происходит на малой скорости. При срабатывании контакта 1ДН снова включается реле Я и своим размыкающим контактом выключает напряжение на выходе «Вперед. Подвижный объект останавливается в рабочей зоне. Через замыкаюнще контакты реле В и Н нодается нанряженне на выход «Сигнал точной остановки. В дальнейшем при случайном выходе подвижного объекта за иределы допустимой рабочей зоны (например, из-за вибрации, вызваииой движениями рабочих органов штабелера по другим координатам) корректировка ноложения подвижного объекта относительно рабочей зоны происходит аналогичио (на малой скорости). Перемещение нодвижного объекта 1 к заданному месту адресования может происходить как на двух, так и на одной (малой) скорости. В последнем случае кнопку «Большая скорость не нажимают. Исправность схемы управления контролируется с ломощью выхода «Контроль исправности. В течение всего времени работы схемы при ее исправности на этот выход через параллельно включенные замыкающпе контакты реле В и Н подается напряжение. Фиксация подвижной части 5 задающего переключателя в шаговом положении относительно неподвижных частей 4 и 8 обеспечивается за счет сил взаимодействия рядов постоянных магнитов 11, установленных на подвижной части 5, и рядов постоянных магнитов 9 и 10, установленных на неподвижных частях 4 Н 8 задаЕОщего переключателя. При неточном ноложении постоянных магнитов 6 относительно магнитоуправляемых контактов 1В-6В, 1Н-6Н (иапример, изображенном на фиг. 4) отталкивание одноименных полюсов магнитов подвижного и неподвижного рядов и притяжение разноименных будут обеспечивать движение иодвижной части 5 в точное положение. Дв-ижение закончится тогда, когда подвижная часть 5 нридет в одно из состояний устойчивого равновесия (см. фиг. 5) и постоянные магниты 11 ряда будут находиться на одной линии с магнитами 9 и 10 рядов, при этом полюсы магнитов 11 и находящиеся вблизи них полюсы соответствующих магнитов 9 -ц 10 будут разпоимеивы. объекта / обеспечпвается регулировкой положения ПОСТОЯ1И1ЫХ магнитов 2 и 3 относительно друг друга и относительно подвижного объекта /. На фиг. 1 расстояиие между магнитоуправляемыми коитактами 1В, 2В,..., 6В или 1И, 2Н,..., 6Н, т. е. между центрами мест адресования, одинаковое. Одиако остановка подвижного Объекта в рабочей зоне у заданного места адресования обесиечивается и в том случае, когда эти расстояния неодинаковые. Точность остановки ири этом не изменяется. Предмет изобретения Устройство для автоматического адресования ПОДВИЖНЫХ объектов, например стеллажных щтабелеров и рабочих органов торговых автоматов, состоящее из датчика положения объекта, задающего переключателя с магнитоуправляемыми контактами, равномерно расположенными и радиально ориентированными на его неиодвижиой круговой плате, и постоянными магнитами, закрепленными на подвижной плате нанротив контактов н с тем же щагом, что и носледние, и электрической схемы, содержащей две нараллельно подключенных к источнику питания цепи, каждая из которых образована реле и уномянутыми выще магнитоуправляемыми контактами, соединенными так, что к одному из реле параллельно подключены контакты, расположенные на одной половине пеподвижной илаты переключателя, а к другому - расположенные на другой ее половине, отличающееся тем, что, с целью скоростиого перемещения подвижного объекта в зоне адресования и корректировки его положения отиосительио места адресования с пониженной скоростью, а также возможности плавного регулирования пределов зоны адресования, датчик положения объекта содержит магнитоуиравляемые контакты, расположенные у каждого из мест адресования попарно по разным сторонам трассы объекта и соединенные последовательно каждый с одним контактом задающего переключателя так, что контакты одной пары подключены к .контактам, расположенным на плате переключателя диаметрально противоположно, и постоянные магннты, закрепленные на подвижном объекте по обеим его сторонам, смещенные один относительно другого с таким расчетом, чтобы зона одновременного включения обоих контактов, закренленных у одного места адресования, соответствовала допустимой зоне остаповки подвижного объекта, и имеющие зону действия в направлении перемещения, превышаюидую максимальное расстояние между магнитоуправляемыми контактами смежных мест адресования, при этом ЧИСЛО постоянных магнитов, закрепленных на подвижной плате переключателя, на едииицу

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧ'ЕСКОГЮ АДРЕСОВ АВДИЯ ГГОДгВЙЖИЫХ ©БЪЕКФОВ | 1970 |
|
SU283895A1 |
| Поворотный переключатель | 1974 |
|
SU528627A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО АДРЕСОВАНИЯ ГРУЗОВ В ПОДВЕСНЫХ ТРАНСПОРТНЫХ СИСТЕМАХ | 1972 |
|
SU420519A1 |
| КОНЦЕВОЙ | 1973 |
|
SU388311A1 |
| СИГНАЛИЗАТОР ПЕРЕМЕЩЕНИЯ | 1971 |
|
SU304637A1 |
| Переключатель | 1973 |
|
SU479169A2 |
| Система адресования груза для распределительных конвейеров | 1972 |
|
SU438591A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОЙ ОСТАНОВКИ I ЛЕНТОПРОТЯЖНОГО МЕХАНИЗМА МАГНИТОФОНА | 1971 |
|
SU291235A1 |
| ДАТЧИК МЕСТОНАХОЖДЕНИЯ ОБЪЕКТА | 1971 |
|
SU309131A1 |
| ГРОМКОГОВОРЯЩИЙ ТЕЛЕФОННЫЙ АППАРАТ | 1970 |
|
SU265956A1 |