1
Изобретение относится к распределительным конвейерам с механизированным съемом и отправкой предметов и может быть использовано на предприятиях с многооперационным производственным циклом.
В основном авт. св. 329090 описана система адресова-ния груза для распределительных конвейеров, содержащая блоки датчиков и адресов. Блок датчиков выполнен в виде магнитоуправляемых контактов, например в виде ампул с инертным газом, расположенных на Контактных .вилках, а блок адресов - в виде постоянных магнитов, расположенных на иесущем органе конвейера и воздействующих на магнитоуправляемые контакты.
Предлагаемая система адресования груза является дальнейшим усовершенствованием системы адресования груза по авт. св. 329090. Она позволяет автоматизировать процесс отправки груза и адреса следующей технологической операции. Это достигается благодаря тому, что блок адресов снабжен изолирующими шунтами по числу постоянных магнитов, установленными с возможностью перемещения их относительно магнитов, а блок датчиков снабжен соленоидами, воздействующими на упомянутые щунты.
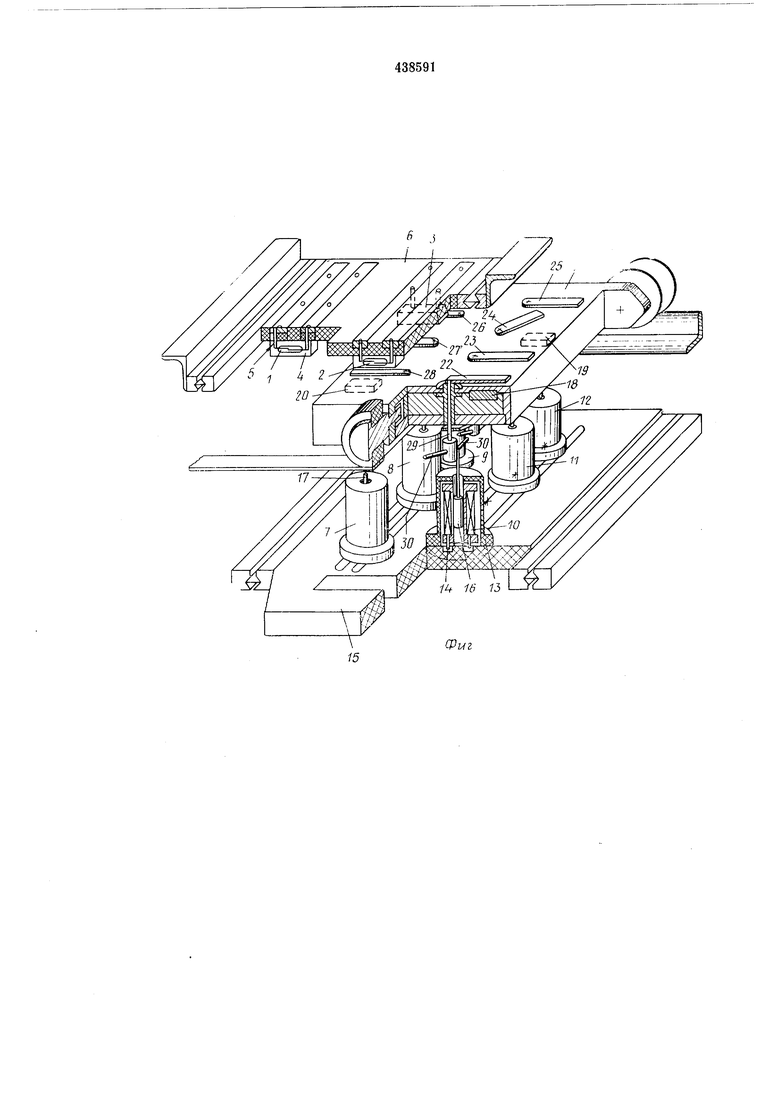
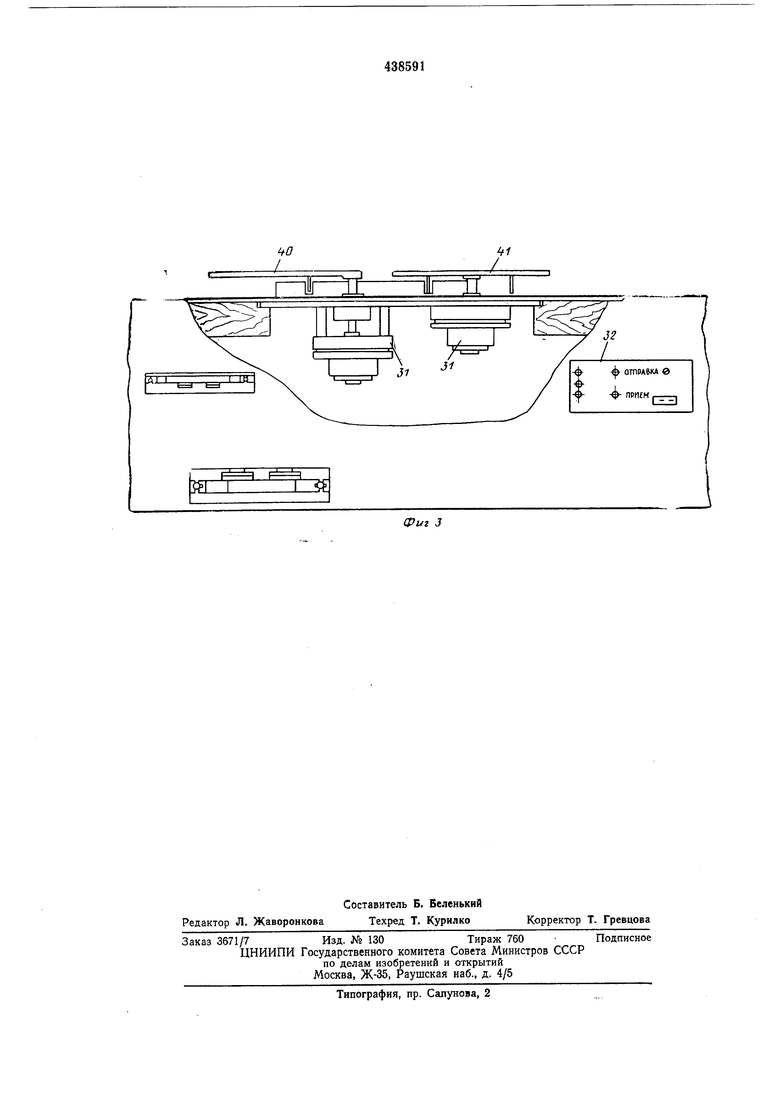
На фиг. I показаны блоки датчиков и адресов и их взаимное расположение; на фиг.
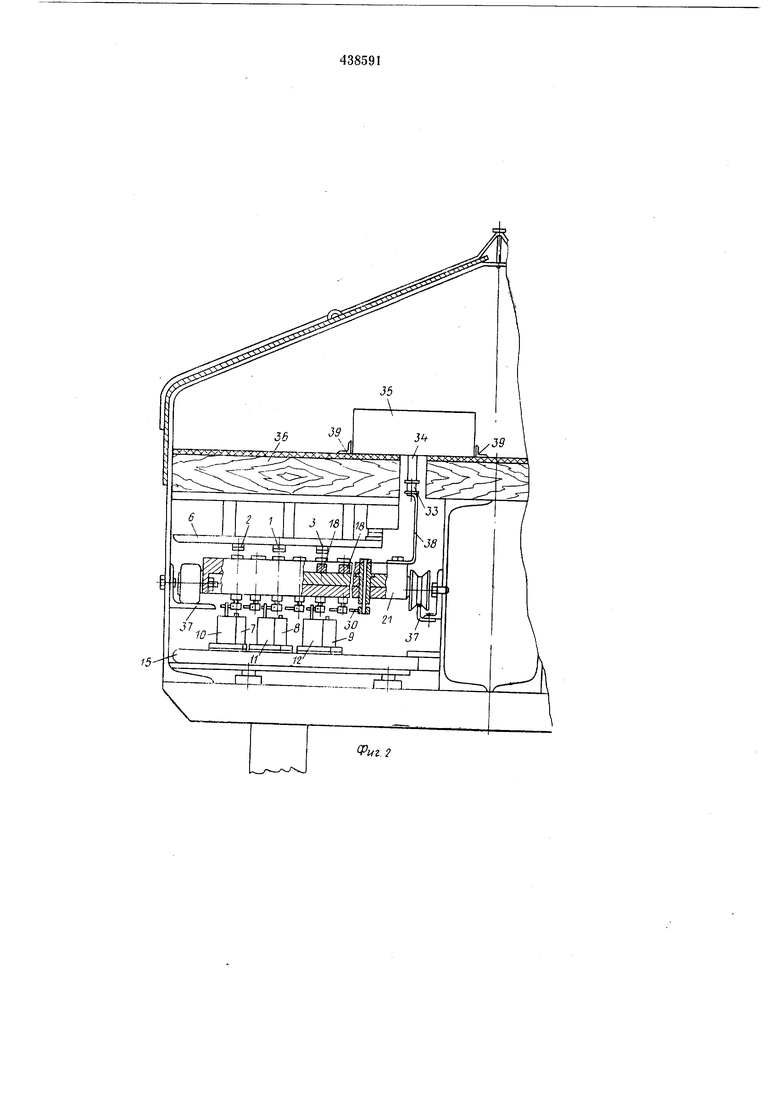
2-одна ветвь конвейера, поперечный разрез; на фиг. 3 - механизм приема и отправки.
В электрическую цепь исполнительного механизма приема (фиг. 1) последовательно включены два нормально разомкнутых магнитоуправляемых контакта 1 и 2, а в электрическую цепь исполнительного механизма отправки последовательно включен нормально разомкнутый магнитоуправляемый контакт 3,
служащий для распознавания свободного штыря. Каждый из магнитоуправляемых контактов находится в пластмассовом корпусе 4, штыри .5 которого входят в контактные гнезда платы 6. Такая плата установлена на каждом рабочем месте на неподвижной части конвейера. Каждая пара контактных гнезд панели имет номер. Комбинация из д.вух пар контактных гнезд, по одному из каждого ряда, образует адрес определенной операции. Для изменения адреса плата выдвигается по направляющим и магнитоуправляемые контакты переставляются в соответствующие гнезда. Параллельно электрической цепи исполнительного механизма приема включены соленоиды 7, 8 и 9, а параллельно исполнительному механизму отправки -соленоиды 10, 11 и 12, каждый из которых находится в пластмассовом корпусе 13, штыри 14 которого .входят в
контактные гнезда платы 15. Такая плата
установлена на каждом рабочем месте на неподвижной части конвейера. Все соленоиды снабжены сердечинками 16 и 17 (остальные не показаны), которые выходят вверх лри подаче напряжения на соленоиды. Соленоиды 7, 8, 9 служат для сброса адреса и набора признака «Свободный на приеме, а соленоиды 10, 11, 12 - для «абора адреса и сброса признака «Свободный при отправке. Магнитоуправляемые контакты 1, 2, 3 и соленоиды 7-12 с платами 6 и 15 образуют блок датчиков.
Блок адресов образован постоянными магнитами 18, 19, 20 (остальные не показаны), смонтированными в корпусе 21, и изолирующими шунтами 22-28 по числу постоянных магнитов. Шунты экранируют или пропускают магнитный поток в область .расположения магнитоуправляемых контактов. Для этого шунты 22-28 установлены на оси 29 с возможностью поворота. На конце оси расположены два флажка 30, которые, взаимодействуя с сердечниками соленоидов 7-12, разворачивают шунт в одно из двух устойчивых лоложений. Если изолируюш,ий шунт находится над магнитом (например, шунт 22 над магнитом 18), то через шунт замыкаются магнитные силовые линии, и магнитоуправляемый контакт не замыкается, когда такой магнит проходит под магнитоуправляемым контактом. Если изолирующий шунт развернут (например, шунт 24 над магнитом 19), то магнитные силовые линии не замыкаются на шунт, и в случае прохождения такого магнита под магнитоуправляемым контактом, последний замыкается.
Предлагаемая система адресования обслуживает конвейер (фиг. 2 и Э), который содержит: механизм приема и отправки в виде электродвигателей 31, плату 6 с магнитоуправляемыми контактами, ллату 15 с соленоидами и пульт управления 32. Несуш,ий орган конвейера - цепь 33 € закрепленными на ней штырями 34 для транспортирования тары 35 с грузом. Под настилом 36 конвейера по направляюшим 37 перемещается смонтированный в корпусе 21 блок адресов, водило 38 которого жестко связано с цепью 33. Цепь 33 приводится в движение электродвигателем (не показан).
Груз транспортируется в цилиндрической таре 35, путь которой ограничен угольниками 39. На каждом рабочем месте имеется накопитель (не показан), куда электродвигатель 3 механизма приема рычагом 40 загоняет тару 35 при приеме груза, и электродвигатель 3il механизма отправки выталкивает ее рычагом 41 на путь перед штырем 34 при отправке.
Работа системы адресования груза заключается в следующем. Тара 35 с предметами производства устанавливается в накопитель
на место, предназначенное для отправки, и на пульте управления 32 нажимается кнопка «Отправка. Рабочий берет из накопителя следующую тару с предметами и начинает их обрабатывать. Когда подходит свободный штырь 34, магнит 19 (с признаком «Свободный) воздействует на соответствующий магнитоуправляемый контакт 3, последний замыкается и включает электрическую цепь электродвигателя 31 механизма отправки, который поворачивается на 180° и водилом 38 выталкивает тару 35 на путь перед штырем 34, одновременно срабатывают параллельно включенные ему соленоиды 10, 11, 12 и поворачивают флажки 30 изолирующих шунтов 22, 24, 28 таким образом, что закрывают магнит 19 (с признаком «Свободный) и открывают магниты 18, 20 адреса следующей операции. Через импульсный трансформатор (яе показан) поступает сигнал на схему «.Прием груза, давая ей разрешение на прием одной тары.
После того как электродвигатель Э1 .механизма отправки развернулся на 180°С, вся схема отправки приходит в исходное положение. При подходе тары 35 к рабочему месту, на котором выполняется указанная операщия, и разрешении на прием магниты 18 и 20 воздействуют на соответствующие магнитоуправляемые контакты 1 и 2, последние замыкаются и включают электрическую цепь электродвигателя 31 механизма приема, который в свою очередь разворачивается на 90°, затем реверсируется и рычагом 40 загоняет тару 35 в накопитель. Одновременно с электродвигателем 31 механизма приема срабатывают параллельно включенные соленоиды 7, 8, 9 и, воздействуя на флажки ЭО, разворачивают изолирующие шунты 22, 24, 28 таким образом, что открывают магнит 19 (с признаком «Свободный) и закрывают магниты 18, 20 адреса данной операции. После останова электродвигателя 31 механизма приема схема приходит в исходное положение (как до нажатия кнопки «Отправка). При дальнейшей работе указанный цикл повторяется.
Таким образом осуществляется автоматизация процесса отправки груза и набора адреса следующей технологической операции.
Предмет изобретения
Система адресования груза для распределительных конвейеров по авт. св. 329090, отличающаяся тем, что, с целью автоматизации процесса отправки груза -и набора адреса следующей технологической операции, блок адресов снабжен изолирующими шунтами по числу постоянных магнитов, установленными с возможностью перемещения их относительно магнитов, а блок датчиков снабжен соленоидами, воздействующими на упомянутые шунты.
1 /
ф- ОТПРАвКА 0 -ф- ПРИЕМ