Изобретение усовершенствует ротационные гамма-терапевтические аппараты, применяемые преимущественно для лечения онкологических заболеваний.
Известны устройства для воспроизводства целого числа качаний радиационной головки гамма-терапевтического аппарата, содержащие электрические двигатели, механические передачи и элементы дистанционного управления.
Предлагаемое устройство отличается от известных тем, что в нем имеется электромагнит, срабатывающий от шкального механизма и управляющий анкером, который после каждого полного качания головки фиксирует подпружиненное храповое колесо, связанное с подвижным упором, отключающим механизм движения головки после заданного целого числа ее качаний. Такое выполнение устройства обеспечивает равномерное распределение доз.
Для точной стабилизации скорости качания головки система регулирования скорости содержит цепь отрицательной обратной связи.
Повышенная надежность работы устройства обеспечивается тем, что щкальный механизм содержит два зубчатых колеса с установочными индексами и двумя колесами с упорами, причем каждая пара зубчатых колес с индексом и упором приводится в движение через шестерни, установленные на общем валике.
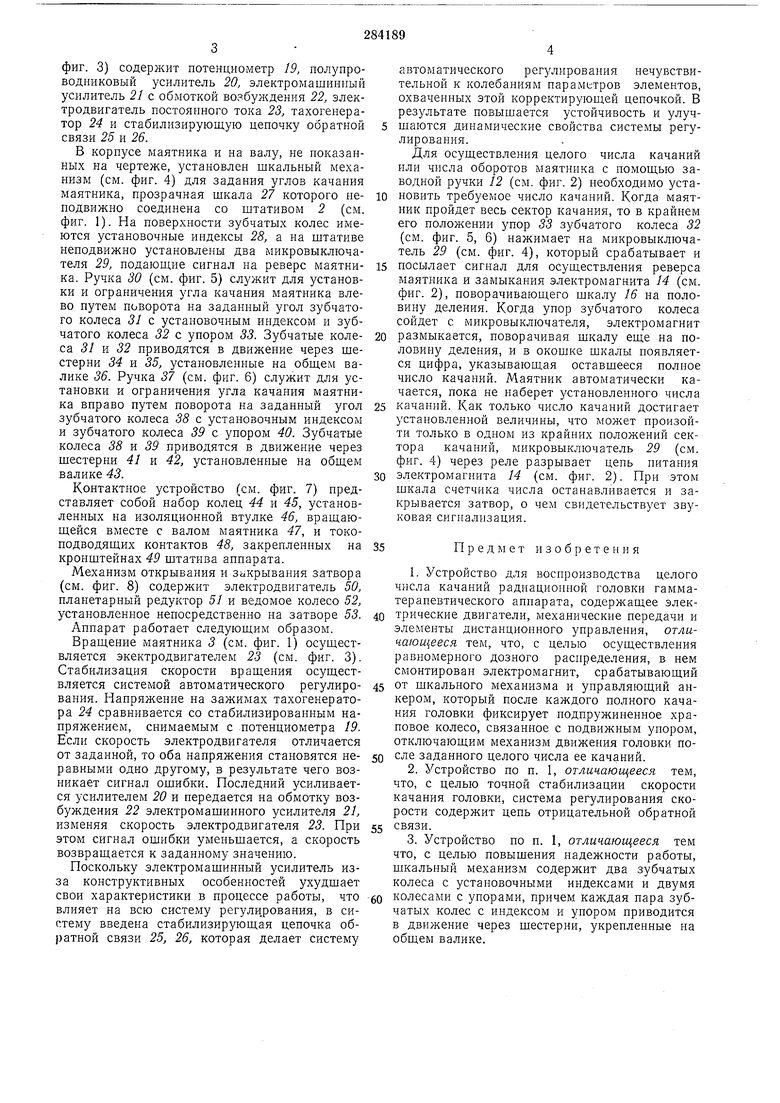
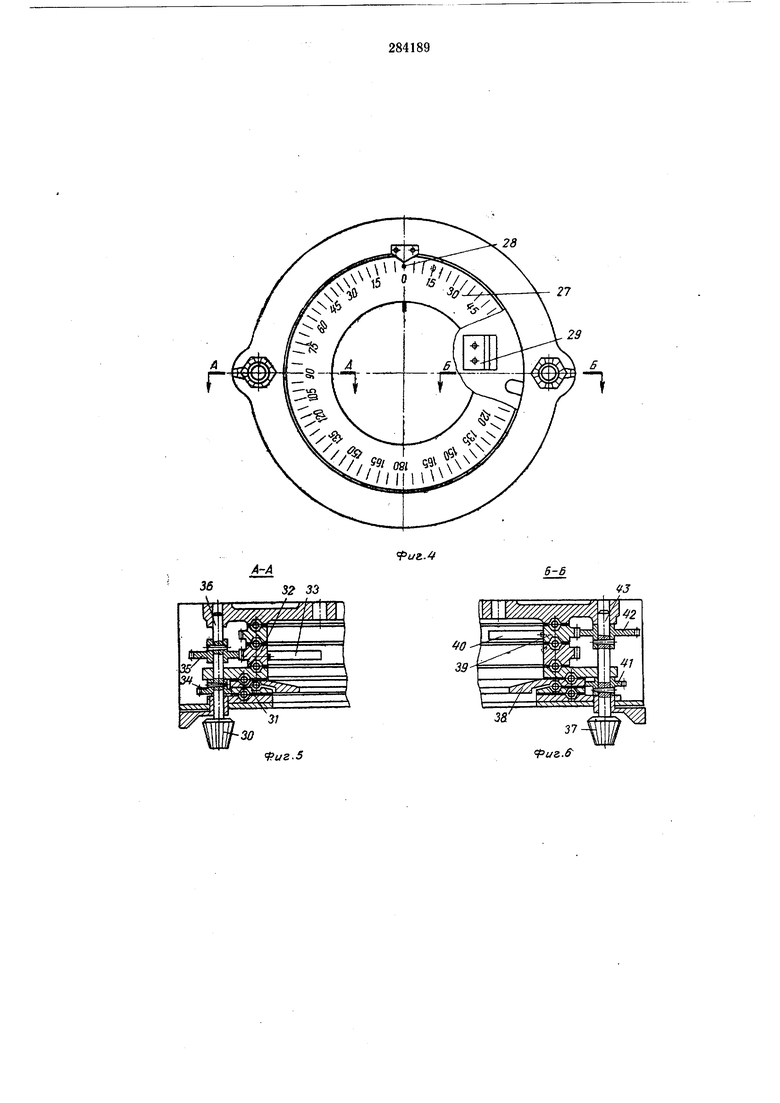
На фиг. 1 изображен ротационный гамматераневтический аппарат, общий вид; на фиг. 2 - устройство для воспроизводства целого числа качаний радиационной головки гамма-терапевтического аппарата; на фиг. 3 дана схема регулирования скорости перемещения; на фиг. 4 представлен щкальный механизм, в плане; на фиг. 5 - разрез по А-А на фиг. 4; на фиг. 6 - разрез по .Б-Б на фиг. 4;
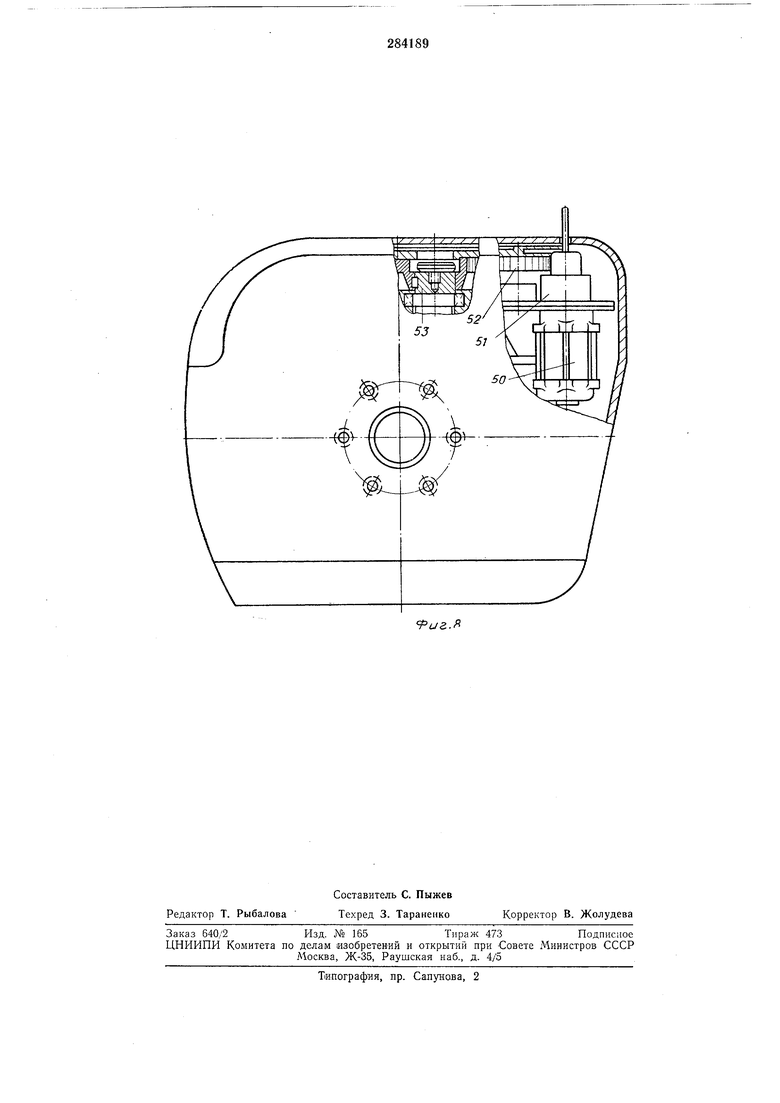
на фиг. 7-контактное устройство; на фиг. 8- механизм открывания и закрывания затвора радиационной головки.
Ротационный гамма-терапевтический аппарат содержит радиационную головку 1 (см.
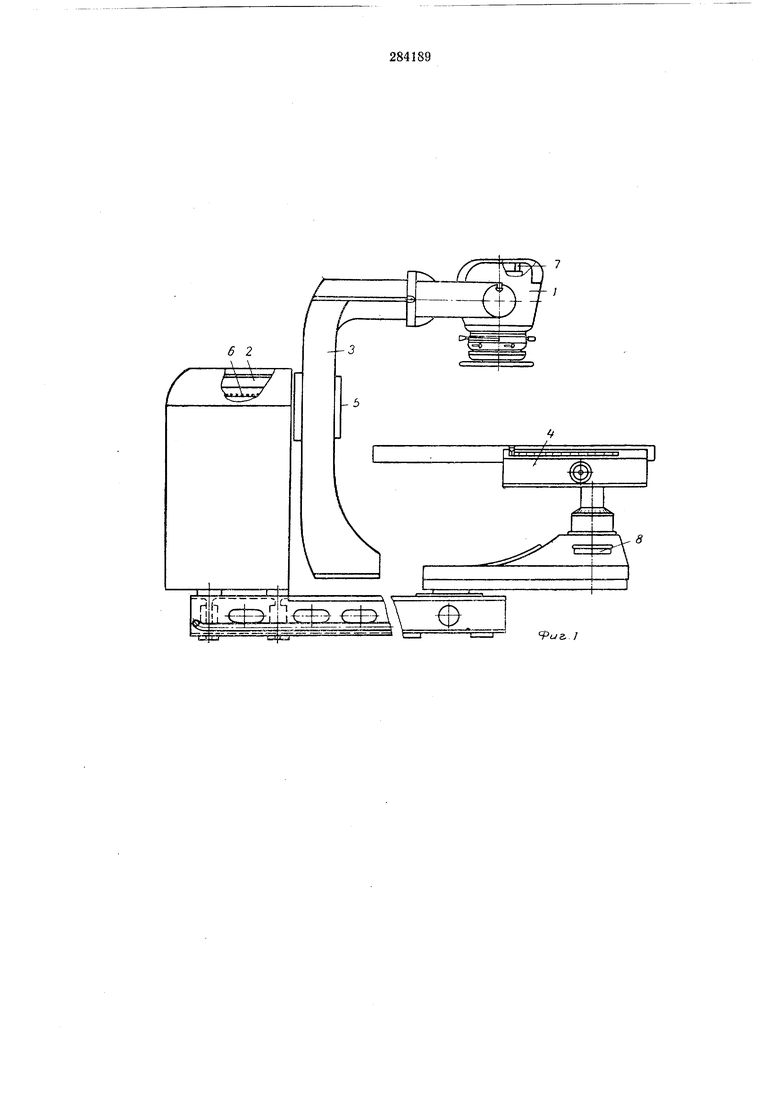
фиг. 1), штатив 2, маятник 3, лечебный стол 4, шкальное устройство 5, контактное устройство 6, механизм 7 открывания и закрывания затвора, съемную подставку 8. На передней стенке 9 пульта управления
расположено устройство для воспроизводства числа качаний радиационной головки (см. фиг. 2), которое включает в себя храповое колесо 10, находящееся под действием пружины // и связанное с заводной ручкой 12, анкер 13, электромагнит 14, срабатывающий от выключателей шкального механизма, возвратной пружины 15, шкалы 16, выключателя 17 и упора 18. Система автоматического регулирования
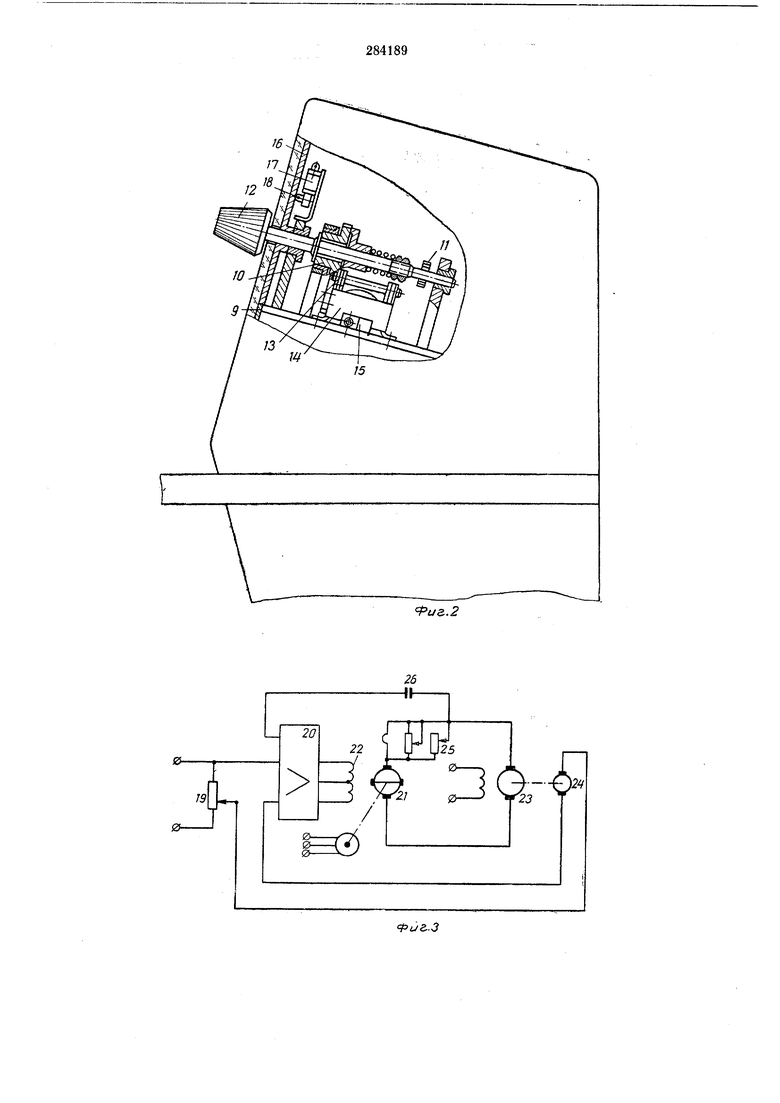
фиг. 3) содержит потенциометр 19, полупроводниковый усилитель 20, электромашиниый усилитель 21 с обмоткой возбуждения 22, электродвигатель постоянного тока 23, тахогенератор 24 и стабилизирующую цепочку обратной связи 25 и 26.
В корпусе маятника и на валу, не показанных на чертеже, установлен шкальный механизм (см. фиг. 4) для задания углов качания маятника, прозрачная шкала 27 которого неподвижно соединена со штативом 2 (см. фиг. 1). На поверхности зубчатых колес имеются установочные индексы 28, а на штативе неподвижно установлены два микровыключателя 29, подаюш,ие сигнал на реверс маятника. Ручка 30 (см. фиг. 5) служит для установки и ограничения угла качания маятника влево путем поворота на задапный угол зубчатого колеса 31 с установочным индексом и зубчатого колеса 32 с упором 33. Зубчатые колеса 31 и 32 приводятся в движение через шестерни 34 и 35, установленные на общем валике 36. Ручка 37 (см. фиг. 6) служит для установки и ограничения угла качания маятника вправо путем поворота на заданный угол зубчатого колеса 38 с установочным индексом и зубчатого колеса 39 с упором 40. Зубчатые колеса 38 и 39 приводятся в движение через шестерни 41 и 42, установленные на общем валике 43.
Контактное устройство (см. фиг. 7) представляет собой набор колец 44 и 45, установленных на изоляционной втулке 46, вращающейся вместе с валом маятника 47, и токоподводящих контактов 48, закрепленных на кронштейнах 49 штатива аппарата.
Механизм открывания и закрывания затвора (см. фиг. 8) содержит электродвигатель 50, планетарный редуктор 51 и ведомое колесо 52, установленное непосредственно на затворе 53.
Аппарат работает следующим образом.
Вращение маятника 3 (см. фиг. 1) осуществляется экектродвигателем 23 (см. фиг. 3). Стабилизация скорости вращения осуществляется системой автоматического регулирования. Напряжение на зажимах тахогенератора 24 сравнивается со стабилизированным напряжением, снимаемым с потенциометра 19. Если скорость электродвигателя отличается от заданной, то оба напряжения становятся неравными одно другому, в результате чего возникает сигнал ошибки. Последний усиливается усилителем 20 и передается на обмотку возбуждения 22 электромашинного усилителя 21, изменяя скорость электродвигателя 23. При этом сигнал ошибки уменьшается, а скорость возвращается к заданному значению.
Поскольку электромашинный усилитель изза конструктивных особенностей ухудшает свои характеристики в процессе работы, что влияет на всю систему регулирования, в систему введена стабилизирующая цепочка обратной связи 25, 26, которая делает систему
автоматического регулирования нечувствительной к колебаниям параметров элементов, охваченных этой корректирующей цепочкой. В результате повышается устойчивость и улучшаются динамические свойства системы регулирования.
Для осуществления целого числа качаний или числа оборотов маятника с помощью заводной ручки 12 (см. фиг. 2) необходимо установить требуемое число качаний. Когда маятник пройдет весь сектор качания, то в крайнем его положении упор 33 зубчатого колеса 32 (см. фиг. 5, 6) нажимает на микровыключатель 29 (см. фиг. 4), который срабатывает и
посылает сигнал для осуществления реверса маятника и замыкания электромагнита 14 (см. фиг. 2), поворачивающего шкалу 16 на половину деления. Когда упор зубчатого колеса сойдет с микровыключателя, электромагнит
размыкается, поворачивая шкалу еше на половину деления, и в окошке шкалы появляется цифра, указываюш,ая оставшееся полное число качаний. Маятник автоматически качается, пока не наберет установленного числа
качаний. Как только число качаний достигает установленной величины, что может произойти только в одном из крайних положений сектора качаний, микровыключатель 29 (см. фиг. 4) через реле разрывает цепь питания
электромагнита 14 (см. фиг. 2). При этом шкала счетчика числа останавливается и закрывается затвор, о чем свидетельствует звуковая сигнализация.
Предмет изобретения
1.Устройство для воспроизводства целого числа качаний радиационной головки гамматерапевтического аппарата, содержащее электрические двигатели, механические передачи и элементы дистанционного управления, отличающееся тем, что, с целью осуществления равномерного дозного распределения, в нем смонтирован электромагнит, срабатывающий
от шкального механизма и управляющий анкером, который после каждого полного качания головки фиксирует подпружиненное храповое колесо, связанное с подвижным упором, отключающим механизм движения головки поеле заданного целого числа ее качаний.
2.Устройство по п. 1, отличающееся тем, что, с целью точной стабилизации скорости качания головки, система регулирования скорости содержит цепь отрицательной обратной
связи.
3.Устройство по п. 1, отличающееся тем что, с целью повышения надежности работы, шкальный механизм содержит два зубчатых колеса с установочными индексами и двумя
колесами с упорами, причем каждая пара зубчатых колес с индексом и упором приводится в движение через шестерни, укрепленные на общем валике. ЯРиг. J
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИБОР ДЛЯ ОПРЕДЕЛЕНИЯ ЖЕСТКОСТИ КАРТОНА ПРИ ИЗГИБЕ | 1972 |
|
SU426191A1 |
| УСТРОЙСТВО для БИОХИМИЧЕСКОГО АНАЛИЗА КРОВИ | 1969 |
|
SU254136A1 |
| Гамма-терапевтический аппарат | 1975 |
|
SU534895A1 |
| Ротационно-конвергентный гамматерапевтический аппарат | 1975 |
|
SU553767A1 |
| СТЕНД ДЛЯ НАСТРОЙКИ АНТЕНН | 1970 |
|
SU424262A1 |
| УСТРОЙСТВО для РЕГУЛИРОВАНИЯ НАТЯЖЕНИЯ ПРОВОДА, СМАТЫВАЕМОГО OCEBbfM СПОСОБОМ | 1972 |
|
SU339972A1 |
| РАДИАЦИОННАЯ ГОЛОВКАВСЕСОЮЗНА?!МОШО~Т?л'Ш':?:.й^Й' Б|-: | 1970 |
|
SU284816A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ BtTPA С БОРТА ДВИЖУЩЕГОСЯ КОРАБЛЯ | 1971 |
|
SU296036A1 |
| РЕНТГЕНОГРАФИЧЕСКАЯ УСТАНОВКА | 1971 |
|
SU420917A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО РАЗДЕЛЕНИЯ МЕТАЛЛИЧЕСКОЙ ПЛЕНКИ НА НЕСКОЛЬКО ЭЛЕКТРОДОВ | 1967 |
|
SU190945A1 |

L 20
РЭ
..3
А-А
23
fus..
6-6
32 33
.5
