Известны электровибрационные устройства с ручным регулированием режима работы путем изменения жесткости упругих элементов или изменением частоты вибрации приводного механизма, а также автоматические регуляторы, поддерживающие постоянство заданного сдвига фаз между перемещением рабочего органа виброустройства и вынуждающей силой или поддерживающие заданный уровень амплитуды вынужденных колебаний. Однако первые требуют постоянного контроля со стороны оператора, вторые не могут обеспечить резонансный режим при значительных изменениях колеблющейся массы. Следствие этого- значительное увеличение мощности, расходуемой на привод.
В предлагаемом устройстве, с целью устранения указаных недостатков, датчик скорости перемещения рабочего органа посредством цепи обратной связи управляет силовым электромагнитом, поддерживающим незатухающие колебания с частотой собственных колебаний механической системы.
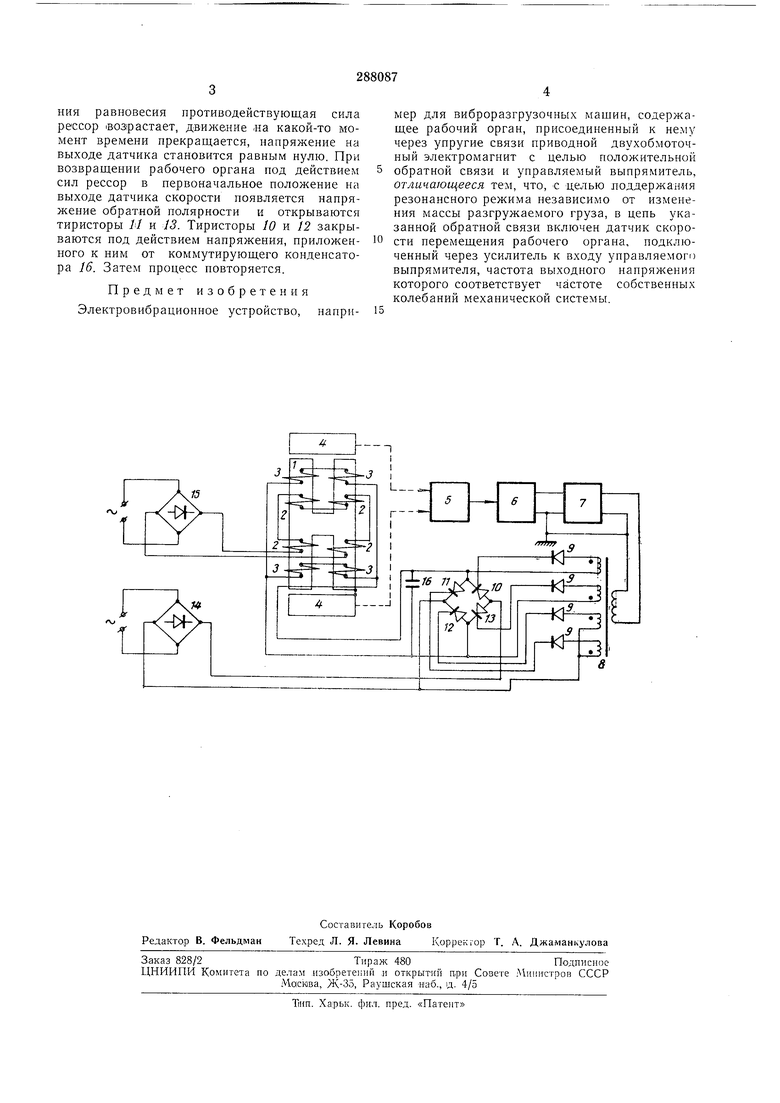
Па чертеже представлена схема работы устройства.
Па статоре / электромагнита располагаются обмотки 2 постоянного и 3 переменного тока, создающие пульсирующее магнитное поле на полюсах. Подвижные части электрона 4 через упругие элементы (рессоры) присоединены к рабочему органу 5, с которым жестко связан датчик 6 скорости. Выходное напряжение датчика, пропорциональное скорости перемещепия рабочего органа, подается на усилитель 7. К выходу усилителя подключен трансформатор 8, четыре вторичных обмоткп которого через диоды 9 подключены к управляющим электродам и катодам четырех кремнпегаых управляемых вентилей (тиристоров) 10-13. Схема на этих тиристорах служит инвертором, питающим обмотки 3 электромагнита неременным током с частотой, равной частоте собственных колебаний .механической колебательной системы. Постоянное напряжение на инвертор подается от выпрямителя М, обмотка постоянного тока питается от выирямителя }5. Параллельно обмотке 3 включен коммутирующий конденсатор 16.
При включении схемы открывается иара тиристоров, находящихся в иротивоположных плечах, например 10 и 12. В это же время отпирающий сигнал на тиристоры // и 13 не пропускается диодами в цепи управления. Ток,
5 протекающий от выпрямителя 14 через открытые тиристоры W и 12 в рабочую обмотку 3, приводит рабочий орган в движение. Возникающее при этом на выходе датчика 6 напряжение открывает тиристоры 10 и 12. По мере отклонения рабочего органа от иоложения равновесия противодействующая сила рессор Возрастает, движение .на какой-то момент времени прекращается, напряжение на выходе датчика становится равным нулю. При возвращении рабочего органа под действием сил рессор в первоначальное положение на выходе датчика скорости появляется напряжение обратной полярности и открываются тиристоры 11 и 13. Тиристоры 10 и 12 закрываются под действием напряжения, приложенного к ним от коммутирующего конденсатора 16. Затем процесс повторяется.
Предмет изобретения Электровибрационное устройство, например для виброразгрузочных машин, содержащее рабочий орган, присоединенный к нему через упругие связи приводной двухобмоточный электромагнит с целью положительной обратной связи и управляемый выпрямитель, отличающееся тем, что, с целью поддержания резонансного режима независимо от изменения массы разгружаемого груза, в цепь указанной обратной связи включен датчик скорости перемещения рабочего органа, подключенный через усилитель к входу управляемоп) выпрямителя, частота выходного напряжения которого соответствует частоте собственных колебаний механической системы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электровибрационное устройство | 1980 |
|
SU866557A2 |
| Электровибрационное устройство | 1977 |
|
SU661520A1 |
| ЭЛЕКТРОВИБРАЦИОННОЕ УСТРОЙСТВО | 1994 |
|
RU2116143C1 |
| Устройство для регулирования амплитуды колебаний электромагнитного вибровозбудителя | 1981 |
|
SU1072013A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМИ ВИБРАТОРАМИ | 2008 |
|
RU2348961C1 |
| БЛОК УПРАВЛЕНИЯ ТИРИСТОРНЫМ ПРЕОБРАЗОВАТЕЛЕМ ЧАСТОТЫ | 2003 |
|
RU2265238C2 |
| Электровибрационное устройство к загрузочному бункеру | 1980 |
|
SU904986A1 |
| Автономный инвертор с управляемым подзарядом | 1971 |
|
SU474087A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПРИВОДОМ ВИБРАЦИОННОГО ДВИЖЕНИЯ КОЛЕБАТЕЛЬНОЙ МЕХАНИЧЕСКОЙ СИСТЕМЫ И ЭЛЕКТРОМАГНИТНЫЙ ВИБРОПРИВОД ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2147941C1 |
| АКУСТИЧЕСКИЙ ПЕРЕДАТЧИК СИСТЕМ АКУСТИЧЕСКОГО И РАДИОАКУСТИЧЕСКОГО ЗОНДИРОВАНИЯ | 1999 |
|
RU2172002C1 |
