Изобретение относится к области испытаний парашютных систем.
Известны способы определения параметров десантирования грузов, заключающиеся в том, что скорость приземления измепя от, а работу парашютной системы фиксируют посредством применения кинотеодолитной съемки нли «метода шнура.
Однако в случае применения кинотеодолитной съемки невозможно измерить параметры снижения груза у земли на пересеченной местности, а при использовании «метода шнура определить скорость приземления можно только на последних метрах приземления.
Предлагаемый способ позволяет осунхествлять определеиие параметров десантирования в любой момент времени на всей траектории движения груза. Способ позволяет определить значения скорости снижения, высоту и время работы парашютной системы.
Предлагаемый способ поясняется чертежом.
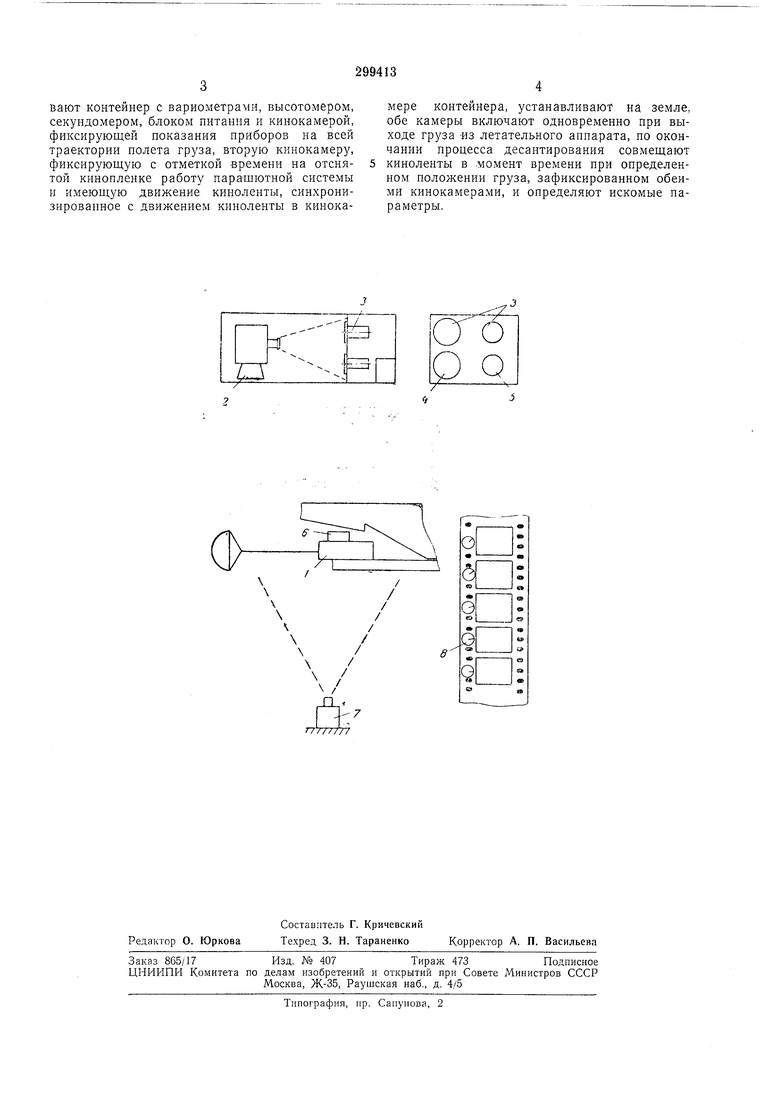
Пепосредственно на десантируемом грузе устанавливают контейнер с вариометрами, например ВАР-10, ВАР-75, высотомером типа БД-10, кинокамерой, секундомером и блоком питания. Кинокамера в контейнере визируется на шкалы приборов.
пленке отметку времени. Работа обеих кинокамер строго синхронизируется.
Предлагаемый способ осуществляется следующим образом. В момент начала выхода
из летательного аппарата десантируемого груза / включают кинокамеру 2, фиксирующуго показания вариометров 3, высотомера 4 и секундомера 5, установленных в контейнере 6 на грузе. Одновременно включают кннокамеру 7, устаиовлениу 0 на земле и фиксирующую работу парашютной системы с отметкой времени на отснятой кинопленке 8 на всей траектории движеиия груза. По окончании процесса десантирования
совмещают киноленты обеих камер. Соответственно моменту времени при определенном положении груза н определяют параметры десантирования, например скорость снижения, время работы паращютной системы в период
стабилизации, раскрытия основных п тормозиых паращютов и т. д.
Предмет изобретения
Способ определения параметров десантирования грузов, основанный на нрпмененип кпнос1;емк1, отличающийся те:,, что, с целью повыщенпя надежности и точности измерения на всей траектории движения груза, непосредвают контейнер с варнометрами, высотомером, секундомером, блоком питания и кинокамерой, фиксирующей показания нриборов на всей траектории полета груза, вторую кинокамеру, фиксирующую с отметкой времени на отснятой кинопленке работу парашютной системы и имеющую движение киноленты, синхронизированное с движением киноленты в кинокамере контейнера, устанавливают на земле, обе камеры включают одновременно при выходе груза -из летательного аппарата, по окончании процесса десантирования совмещают киноленты в .момент времени при определенном положении груза, зафиксированном обеими кинокамерами, и определяют искомые параметры.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ и система приземления парашютиста | 2017 |
|
RU2671896C1 |
| СПОСОБ ПРИЦЕЛИВАНИЯ ПРИ ПАРАШЮТНОМ ДЕСАНТИРОВАНИИ ГРУЗОВ | 1995 |
|
RU2105699C1 |
| СПОСОБ ОТДЕЛЕНИЯ ГРУЗА ОТ ПАРАШЮТНОЙ СИСТЕМЫ | 2019 |
|
RU2745508C2 |
| Авиационный ракетно-космический комплекс, формируемый на базе ракеты космического назначения, адаптируемой из МБР ТОПОЛЬ-М, и самолёта-носителя ИЛ-76МФ по выведению малых КА на целевые орбиты путём десантирования РКН из самолёта с применением комбинированной транспортно-пусковой платформы и подъёмно-стабилизирующего парашюта | 2016 |
|
RU2636447C2 |
| Способ наземной отработки элементов парашютной подготовки и устройство, его реализующее | 2023 |
|
RU2832674C2 |
| ПНЕВМОАМОРТИЗАТОР ДЛЯ ДЕСАНТИРОВАНИЯ ГРУЗОВ | 2007 |
|
RU2349509C1 |
| ПНЕВМОАМОРТИЗАТОР ДЛЯ ПАРАШЮТНОГО ДЕСАНТИРОВАНИЯ ОБЪЕКТА (ВАРИАНТЫ) | 2019 |
|
RU2722828C1 |
| ЗАМОК ОТЦЕПА ГРУЗА ОТ ПАРАШЮТНОЙ СИСТЕМЫ | 1982 |
|
SU1840530A1 |
| АМОРТИЗИРУЮЩАЯ ПЛАТФОРМА | 1979 |
|
SU1840525A1 |
| СПОСОБ ПРИЦЕЛЬНОГО СБРОСА ГРУЗА С ЛЕТАТЕЛЬНОГО АППАРАТА-НОСИТЕЛЯ | 2002 |
|
RU2220883C1 |
9
