Известны способы автоматического регулирования режима работы гориых машин, основанные на стабилизации мощности привода.
Предлагаемый способ отличается от известных тем, что измеряют момент сопротивления на валу привода, определяют диапазон изменения момента, эк:страполируют его па определенный промежуток времени и изменяют уставку по скорости обратно пропорционально произведепию текуп1,его значения момента на экстраполируемый диапазон его изменения. Это нозволяет оптимально пспользовать MOHI.ность привода.
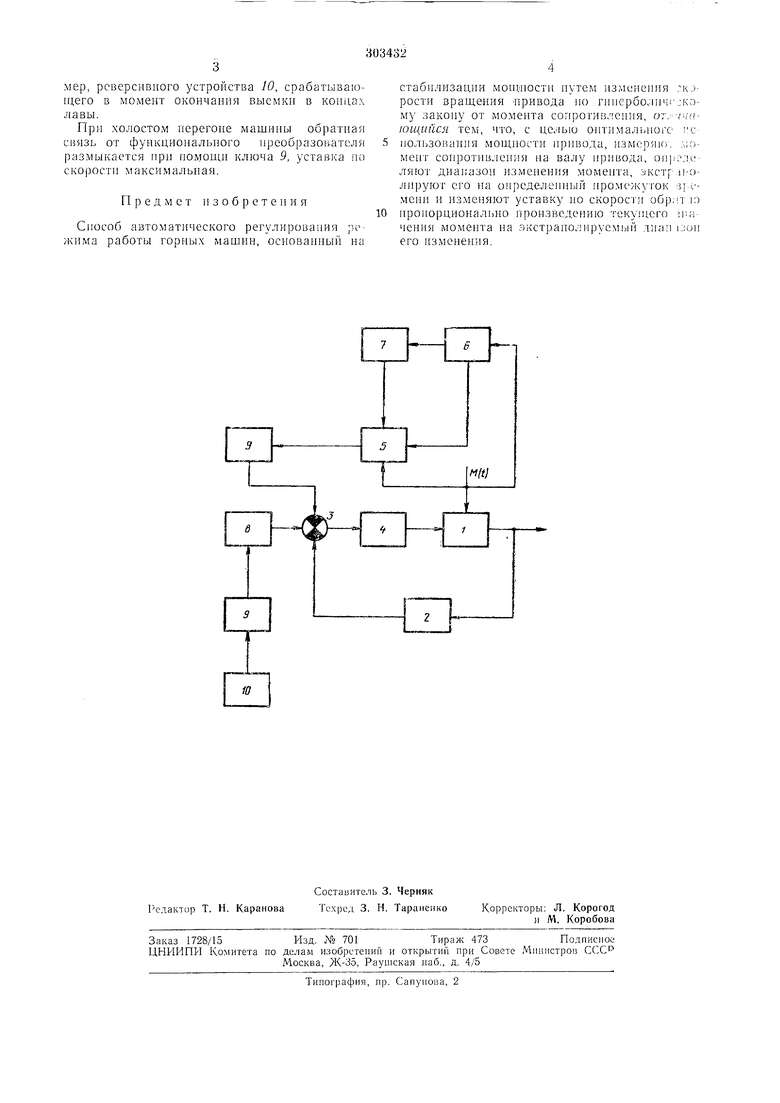
Устройство, реализующее данный способ, ноказано на чертеже.
Скорость вращения гидропривода / контролируется датчиком скорости 2, выход которого через сумматор 5 соединен со входом регулятора 4.
С целью получения гиперболической характеристики привода измеряется фактический момент сопротивления на валу привода п сигнал, пропорциональный этому моменту, поступает на функциоиальный преобразователь 5.
Характеристику фупкциопальпого преобразователя получают путем вычитания из постоянной величииы гиперболической характеристики привода (зеркального отобрал ения гпперболы относительно оси, проходящей через максимум, например, скорости или расхода).
Для наилучшего использования привода диапазон регулирования авто.матически устанавливается минимальным из условий фактического колебания соиротивляемости угля разрушению. Это осуществляется аиализатором 6 диапазона колебапий момента М (t) на валу привода за определенный промелсуток времени и предсказания этого диапазона на будущий промежуток времени за счет экстраполирования. Экстраполятор 7, получив сигнал от анализатора диапазона, автоматически устанавливает минимальный диаиазон в функциональном преобразователе 5. В случае оитибки Б предсказании диапазона на вход
функционального преобразователя подается сигпал непосредственно с анализатора 6, изменяя диапазон в соответствии с фактическим моментом на валу привода. Уставка мощности может быть изменена
ири номощи задающего устройства 8, сигнал которого суммируется с сигналами датчика скорости 2 и функционального преобразователя 5 в сум.мирующем устройстве 3. Для обеспечения работы горной машины с ностояиной
ироизводительностью (скоростью) обратная связь с функционального преобразователя 5 отключается при помощи ключа 9, а для работы с разной скоростью подачп прп движеиии его вверх и вниз задаиие изменяется путем
мер, реверсивного устройства 10, срабатывающего в момент окончания выемки в концах лавы.
Прн холостом перегоне машины обратная связь от функционального преобразователя размыкается при помощи ключа 9, уставка по скорости максимальная.
Предмет изобретения
Способ автоматического регулирования ;н /кима работы горных ,1ашнн, основанный на
стаоилизации монздюсти нутем изменепия рости вращения привода по гпперболичг му закону от момента сопротивления, ov. ющийся тем, что, с целью оптимального пользования мощности пршзода, измеряю, мент сопротивления на валу привода, опр ляют диапазон изменения момеита, экстр лируют его на оиределепный нро.межуток мепи и изменяют уставку но скорости обр; нроиорционально произведеиию текущего чения момента на экстраполпруем1)1Й лиа;1 его изменения.